

II. Основы магнитных методов контроля качества Виды магнитных преобразователей
По виду полезадающей системы, по типу индикаторов магнитного поля, решаемым задачам, магнитные методы классифицируются так, как показано на рис. 16.
К информативным параметрам в магнитном контроле относятся: коэрцитивная сила Нс; намагниченность J; остаточная магнитная индукция Вr; магнитная проницаемость μ (начальная либо максимальная); параметры петли гистерезиса В(Н) или гармонический состав ЭДС индуктивного преобразователя; параметры скачков Баркгаузена; параметры магнитооптического эффекта, оптомагнитные, магнитопорошковые индикаторные изображения.

Рис. 16. Условная классификация способов получения первичной информации при магнитном контроле: МП — магнитопорошковый; МГ — магнитографический, ФЗ — феррозондовый; ГМ — гальваномагнитный; И — индукционный; МА — магнитоакустический; МР — магниторезисторный; МО — магнитооптический; ПМ — пондемоторный.
Все эти методы позволяют решать названные задачи магнитного контроля и их применение к этим задачам иллюстрируется диаграммой, приведенной на рис. 16.
Часто название метода происходит от физических основ детекторов поля. Каждый из методов имеет свои разновидности, например, МП может быть в нескольких исполнениях: порошок может наноситься непосредственно на поверхность исследуемого изделия или располагаться в специальных линзах (рис. 17) над поверхностью намагниченного изделия.
Магнитные линзы представляют собой плоский замкнутый сосуд, заполненный магнитной суспензией и имеющий одну прозрачную стенку и дно, выполненное из зеркальной тонкой пленки. Используется такой детектор обычно только в приложенном поле для грубых дефектов.
Принципиальным
различием в системах регистрации
является
наличие илиотсутствие каких-либо
механических или
электрических элементов, позволяющих
получить изменение
магнитного потока и ЭДС в соответствии
с законом электромагнитной
индукции
![]() t.
Такие
измерения
не проводятся при статических методах
регистрации, например,
с помощью магнитных сопротивлений,
датчиков Холла,
магнитного порошка, магнитных диодов
и т.п.
t.
Такие
измерения
не проводятся при статических методах
регистрации, например,
с помощью магнитных сопротивлений,
датчиков Холла,
магнитного порошка, магнитных диодов
и т.п.

Рис. 17. Некоторые преобразователи для регистрации магнитных полей рассеяния: а — феррозонд; б — магнитная линза; в — магнито-акустический преобразователь; г — датчик Холла.
Принцип действия датчиков Холла основан на том, что если пластина с током (рис. 17, г) помещена в магнитное поле, то на каждый электрон, движущийся внутри пластины, действует сила F1, пропорциональная заряду электрона е0 и векторному произведению его скорости v на магнитную индукцию В, эта сила Fx=eo[vB].
Под действием силы F1 электроны отклоняются к одному краю пластины, создавая там избыток электронов. Так появляется поперечная составляющая поля Ех, что приводит, в свою очередь, к возникновению силы F2 = е0Еx. В установившемся состоянии силы F1 и F2 равны и противоположны по направлению, следовательно Ех = vBO. На практике удобнее пользоваться выражением ЭДС Холла через ток I и геометрические размеры датчика:
Ех = RxB0/d,
где BO — измеряемая индукция; d — толщина пластины; Rx = 1/lOn — постоянная Холла, зависящая от природы вещества, концентрации в нем носителей зарядов.
Относительное измерение удельного сопротивления в слабых магнитных полях:
![]() ,
,
где и — подвижность носителей зарядов. Наиболее чувствительны к магнитным полям преобразователи из арсенида индия, относительное изменение сопротивления которых равно 10 при изменении индукции от 0 до 1 Тл.
Чувствительность магнитных диодов в десятки раз превосходит чувствительность преобразователей на основе магнитных сопротивлений, но для целей измерения такие детекторы неудобны из-за нелинейности градуировочной кривой. Оба эти вида детекторов имеют близкую природу и применяются при автоматизированном магнитном контроле.
В дефектоскопии используется и магнитоакустический метод (рис. 17, в), при котором измерительная катушка 1 наклеивается на пластину 2 из ферромагнетика с сильно развитым магнитострикционным эффектом. В пластине возбуждаются излучателем 3 колебания, которые передаются измерительной катушке. Наводимая ЭДС имеет частоту указанных колебаний и пропорциональна постоянному магнитному полю рассеяния дефекта, которое подмагничивает пластину. Дефект регистрируется обычным УЗ дефектоскопом, с помощью которого возбуждаются колебания в пластине. Этот метод легко поддается автоматизации, но применим для относительно грубых дефектов. Измерение происходит в зоне локального насыщения пластины с развитым магнитострикционным эффектом, который сильно изменяется от степени подмагничивания. Известно много вариантов подобных датчиков, в конструкции которых имеются постоянные магниты, различным образом расположенные дополнительные катушки [2]. На основе этого метода разработаны и внедрены автоматы для контроля гильз цилиндров дизельных двигателей.
Элементы статических и динамических систем измерения постоянных магнитных полей несет в себе магнитографический (МГ) метод контроля (рис. 18) [6 и др.].

Рис. 18. Схема МГ контроля (а) и изображение на экране МГ дефектоскопа (б): 1 — намагничивающее устройство; 2 — МГ лента; 3 — деталь с дефектом; 4-6 — импульсы от дефекта, края шва и края пленки.
На поверхность намагниченной детали накладывается ферромагнитная лента, которая намагничивается тангенциальной составляющей магнитного поля дефекта. Далее лента протягивается в дефектоскопе, где информация считывается магнитными головками, представляющими собой феррозондовые датчики. Недостатком метода является двукратное преобразование информации и реакция только на тангенциальную составляющую поля рассеяния дефекта [2, 6].
На рис. 18 изображено сварочное соединение, подвергаемое намагничиванию с магнитной лентой, и сигналы МГ дефектоскопа, соответствующие дефекту, кромке сварочного шва и краям ленты.
Магнитография нашла применение при строительстве магистральных трубопроводов.
При магнитографии, как и при радиационном контроле, часто под чувствительностью метода подразумевают отношение вертикального размера минимального выявляемого дефекта к толщине металла:
![]()
Чувствительность
зависит от глубины залегания дефекта.
Чем глубже залегает дефект, тем при
прочих равных условиях
должна быть больше величина
![]() и, следовательно,
ниже чувствительность.
и, следовательно,
ниже чувствительность.
На отношение А4/А56 амплитуд полезного сигнала и шума оказывают влияние высота, форма и флуктуация размеров валика усиления. Хорошие результаты получают при МГ, если высота усиления сварных швов не превышает 2,5 % от толщины металла и имеются плавные переходы шва к основному металлу, чешуйчатость шва не превышает 20 % высоты валика усиления. МГ применяется при контроле сварных соединений толщиной до 20 мм. При снятом валике усиления чувствительность метода составляет 3...4 %, без снятого усиления — 8...15 %. Качество получаемой информации во многом зависит от степени прилегания ленты к поверхности шва. Прижим должен быть плотным и равномерным.
В [6] получена зависимость:
![]()
максимума величины напряженности Hg поля над дефектом от отношения l/lО расстояния до центра дефекта (от поверхности изделия) к глубине залегания, при которой напряженность убывает в два раза. Через Hg' обозначена величина поля дефекта, выходящего на поверхность. С ростом толщины металла, покрывающего дефект, магнитное поле Hg убывает по экспоненте.
В зависимости от плотности прилегания ленты, ее расстояния d до изделия (рис. 19, а) сигнал довольно быстро убывает на первых 1...3 мм и мало зависит от магнитной проницаемости среды, разделяющей ленту и изделие. Первая кривая, характеризующая среду с μ » 1, фактически показывает, как убывает сигнал с увеличением глубины его залегания. Кривые рис. 19 получены при испытании образца толщиной 3 мм с искусственным дефектом в виде фрезеровки с его обратной от ленты стороны.
Изменение сигнала от величины напряженности магнитного поля, намагничивающего образец, видно на рис. 19, б, в.

Рис. 19. Зависимость амплитуды сигнала от: а — расстояния между лентой и изделием; б, в — от величины намагничивания.
Из этих зависимостей следует, что имеется вполне определенное значение намагничивания, мало зависящее от глубины залегания дефекта, при котором амплитуда сигнала максимальна. Повышенное намагничивание не увеличивает регистрируемый сигнал. В преобразователе Холла возникает ЭДС в результате искривления пути носителей тока в полупроводниках, находящихся в магнитном поле под действием силы Лоренца.
Напряжение на выходе преобразователя Uу при поперечном эффекте Холла:
![]()
где
Rh
—
постоянная
Холла,
![]() ;
h
— толщина
холловской пластины, м; Iх
—
управляющий ток преобразователя
Холла, А; В
— магнитная
индукция, Тл.
;
h
— толщина
холловской пластины, м; Iх
—
управляющий ток преобразователя
Холла, А; В
— магнитная
индукция, Тл.
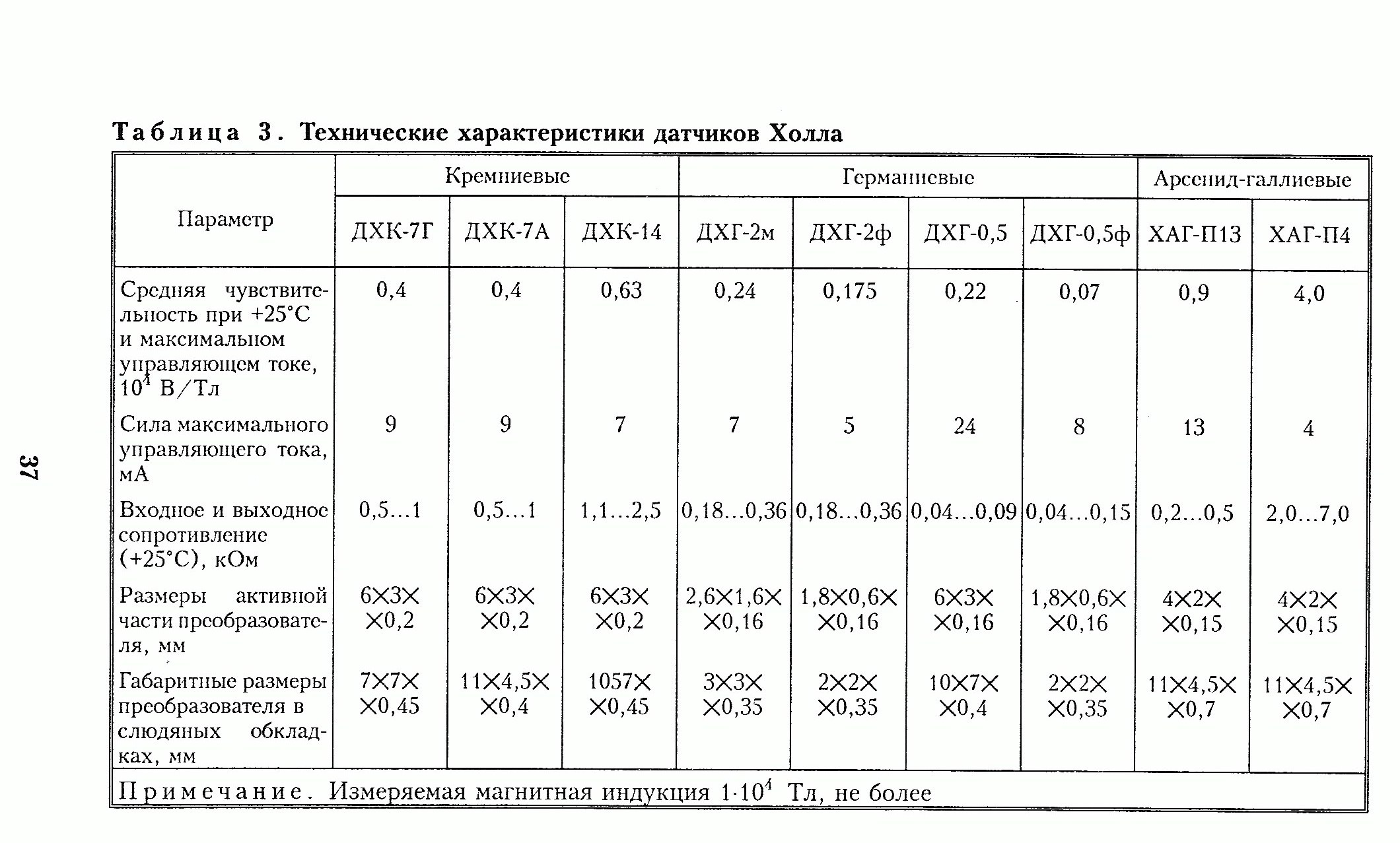
Выпускают кремниевые, германиевые и арсенид-галлиевые преобразователи Холла, основные данные которых приведены в табл. 3. В магниторезисторах происходит изменение электрического сопротивления при IIнесении их в магнитное поле.
Магниторезисторы изготовляют из антимонида индия (InSb), арсенида индия (InAs), эвтектических сплавов типа InSb-NiSb и InSb-GaSb, а также германия (Ge), теллура (HgTe) и селенида ртути (HgSe), антимонида и арсенида галлия (GaSb, GaAs).
Технические характеристики магниторезисторов
|
Параметр |
Материал для изготовления | |
|
InSb |
InAs | |
|
Сопротивление, Ом: при отсутствии магнитного поля в магнитном поле RВ при В=1 Тл |
0,5…200 50…4000 |
0,5…200 1…400 |
|
Относительное изменение сопротивления при В, Тл: 0,1 0,5 1,0 |
0,2…0,5 5…8 10…16 |
0,03…0,5 0,5…1,0 2…3 |
|
Габаритные размеры, мм: наименьшие наибольшие |
5х3х0,2 8х6х0,5 |
5х3х0,2 8х6х0,5 |
Приращение удельного электрического сопротивления ∆ρ магниторезистора равно:
![]()
где А — коэффициент пропорциональности. В малых полях зависимость А от Б квадратичная. Размеры магниторезистора типа МД-130 фирмы «Сони» равны 0,4х0,6 мм, а чувствительность 2 мВ/(А/см).
Коэффициент передачи преобразователей Холла (табл. 3) при полях с индукцией меньше 0,1 Тл изменяется по квадратичному закону, а в области больше 1,0 Тл он несколько увеличивается. Магниторезисторы имеют более высокий коэффициент передачи в полях с индукцией выше 0,2 Тл, поэтому ими следует пользоваться при измерении силовых магнитных полей.
Магнитные порошки по составу, физическим свойствам и назначению подразделяются на четыре вида:
железные порошки, получаемые термическим разложением пентакарбонида железа Fe(Co)5 или диспергированием железа электрической дугой в керосине;
порошки, получаемые в шаровых мельницах измельчением окалины, возникающей при горячей обработке стали;
порошки технического и синтетического магнетика;
порошки ферромагнитной окиси железа, получаемые окислением магнетика.
Наибольшее распространение получили черный магнитный порошок, представляющий собой измельченную окись-закись железа Fe3O4 и буровато-красный порошок — γ-окись железа (γ-Fe2O3).
Для контроля деталей с темной поверхностью используют светлые порошки (с добавлением алюминиевой пудры ПАК-3), либо люминесцентные магнитные порошки. Распространенный люминесцетиый магнитный порошок в 100 г Fe2O3 содержит 15 г люминофора-люмогена светложелтого цвета.
Таблица 3. Технические характеристики датчиков Холла
Люминесцетные порошки используют при контроля как по темным, так и по светлым поверхностям, но при этом место контроля должно быть оборудовано ультрафиолетовым освещением.
Большое значение имеет размер частиц порошка. Средний размер одного зерна 0,1...60 мкм. Магнитные пасты, предназначенные для разведения в жидкости, кроме порошков содержат различные смачивающие, антикоррозионные и другие присадки.
Для улучшения условий осаждения порошка над дефектом применяют водные и масляные магнитные суспензии. Наиболее распространенные составы водных магнитных суспензий (в граммах):
|
1. Черный магнитный порошок или люминесцентный магнитный порошок |
25±5 4±1 |
|
Хромпик калиевый (К2СrО7) |
4±1 |
|
Сода кальцинированная |
10±1 |
|
Эмульгатор ОП-7 или ОП-10 |
5±1 |
|
Вода |
1л |
|
2. Черный магнитный порошок или люминесцентный магнитный порошок |
25+5 4+1 |
|
Нитрит натрия (химически чистый) |
15±1 |
|
Эмульгатор ОП-7 или ОП-10 |
5±1 |
|
Вода |
1л |
|
3.Черный магнитный порошок или люминесцентный магнитный порошок |
25+5 4±1 |
|
Мыло хозяйственное |
1±0,5 |
|
Сода кальцинированная |
12±2 |
|
Вода |
1 |
|
Применяют масляные и керосино-масляные суспензии следующих составов: | |
|
1. Черный магнитный порошок, г или люминесцентный магнитный порошок, г |
25+5 4±1 |
|
Масло РМ, л |
1 |
|
Стабилизирующая присадка Акор-1, % от массы порошка |
0,5...5 |
|
2. Черный магнитный порошок, г |
25+5 |
|
Масло трансформаторное, л |
0,5 |
|
Керосин, л |
0,5 |
|
Стабилизирующая присадка Акор-1, % от массы порошка |
0,5...5 |
В зависимости от объекта контроля применяют суспензии с концентрацией порошков, начиная с 5 г/л и выше. Низкие концентрации используют при контроле резьбы, деталей со структурной полосчатостью и т.п.
Магнитные ленты применяют для записи магнитных нолей, в том числе и при магнитографической дефектоскопии. Двухслойные ленты состоят из ацетилцеллюлозы, ноливинилхлорида, лавсана и магнитоактивного слоя — порошков окиси железа, взвешенного в лаке, обеспечивающего хорошую адгезию с основой. Для изготовления рабочего слоя используют гамма-оксиды железа (γ-Fe2O3), железо-кобальтовый феррит (CoFe203), двуокись хрома (СrО2). В однослойных лентах магнитный порошок вводится непосредственно в основу (резина, полиамидные смолы).
Лента МКУ создана специально для контроля сварных соединений и содержит два рабочих слоя с различной коэрцитивной силой, что позволяет работать и в средних, и в больших намагничивающих полях. Эти ленты успешно применялись при магнитографии строящихся нефте-газопроводных магистралей, при автоматизации наблюдений за развивающимися усталостными трещинами при циклических испытаниях образцов сварных соединений и т.п. Недостатком магнитографии является многократное преобразование информации и реакция только на тангенциалыгую составляющую поля.
Для автоматизации индентификации поверхностных дефектов на ферромагнитных деталях были созданы [2] автоматы на основе магнитоакустических преобразователей.
Если
сила электрического тока в обмотке
возбуждения изменяется
по синусоидальному закону, то ЭДС,
наводимую в измерительной катушке,
которая находится над дефектом,
определяют по формуле
![]()
где w — число витков в катушке; S — сечение катушки; Нт — максимальная напряженность магнитного поля; ω — круговая частота. Для повышения чувствительности параллельно измерительной катушке включают конденсатор. Образуется резонансный контур, который настраивают на определенную частоту. Для измерения постоянных магнитных полей цепь измерительной катушки должна периодически размыкаться. Этот метод не нашел широкого применения в дефектоскопии. Эффективным оказался магнитоакустический метод (рис. 20), при котором измерительная катушка наклеивается на пластину из ферромагнетика с сильно развитым магнитострикционным эффектом [2].

Рис. 20. Магнитоакустический датчик: 1 — излучатель колебаний; 2 — ферромагнитная пластина с развитым магнитострикционным эффектом; 3 — измерительная катушка; 4 — контролируемая деталь с дефектом.
В пластине возбуждаются колебания, которые передаются наклеенной на нее измерительной катушке. Наводимая ЭДС имеет частоту указанных колебаний и пропорциональна постоянному магнитному полю дефекта, которое подмагничивает пластину. На рис. 20 показан один из вариантов магнитоакустического датчика. Этот метод удобен для автоматизации процесса обнаружения относительно поверхностных дефектов. Измерение происходит в зоне локального насыщения пластины с развитым магнитострикционным эффектом, который сильно изменяется от степени подмагничивания.
Колебания структуры пластины создает пьезопреобразователь, подключенный к обычному УЗ-дефектоскопу. ЭДС, наводимая в катушке 3, зависит от поля рассеяния дефекта.
Таким образом информация о результатах магнитного контроля принимается и анализируется с помощью ультразвукового дефектоскопа.
Все магнитные преобразователи могут быть разделены на две категории: полемерные и градиентометрические, в которых измеряемый сигнал равен:
![]()
![]()
В свою очередь полемерные подразделяются на модульные и компонентные. Модульные полемерные преобразователи позволяют вести измерения независимо от ориентации магнитного поля, так как:
![]()
Для компонентных преобразователей возможны измерения по каждой координате:
![]()
![]()
![]()
Если ось преобразователя направлена к соответствующей оси поля (например, ОХ) под углом α, то сигнал будет меньше:
Uх = f(Hcosα) и т.д.
Модульные полемерные преобразователи позволяют измерять магнитную индукцию в воздухе, или, что практически то же самое, напряженность Н = B/μO магнитного ноля независимо от направления. Таким образом, выходной сигнал модульного преобразователя не зависит от ориентации последнего в пространстве.
Для
компонентных преобразователей существуют
три передаточные функции:
![]()
![]()
![]()
Выходной сигнал такого преобразователя определяется одним из компонентов напряженности. И если вектор напряженности направлен под некоторым углом а к соответствующему направлению, то выходной сигнал U = f(Hcosa). Отсюда вытекает понятие диаграммы направленности компонентного магнитного преобразователя. Если такой преобразователь помещен в плоскопараллельное магнитное поле, то поворачиваясь вокруг оси, ортогональной вектору напряженности магнитного поля, он описывает окружность.
Градиентометрические преобразователи позволяют оценивать неоднородность магнитных полей по значению соответствующей производной. Две разновидности таких преобразователей — продольные и поперечные — позволяют оценивать скорость изменения одного из компонентов вектора магнитной индукции в ортогональных направлениях.
Каждый из этих преобразователей (индукционные, феррозондовые, гальваномагнитные, магниторезистивные, магнитооптические, магнитные ленты и магнитные порошки) находится в зоне поля рассеяния дефекта отдельных его компонентов.
В основу принципа действия индукционных преобразователей положен закон электромагнитной индукции, согласно которому ЭДС, наведенная в замкнутом контуре L, пропорциональна изменению во времени магнитного потока.
Можно показать, что в том случае, когда размеры контура L, охватывающего площадь S, остаются неизменными и он не изменяет положения относительно вектора В, появляется так называемая трансформаторная ЭДС:
![]()
возникающая только за счет изменения индукции во времени, т.е. в случае переменных полей.
Если же магнитная индукция постоянна, то изменить магнитный поток во времени можно, поворачивая контур вокруг оси, перпендикулярной вектору В. При этом возникает так называемая ЭДС движения:
![]()
Преобразователи, использующие трансформаторную ЭДС Етр , называют пассивными, и они могут применяться только в переменных магнитных полях. Магнитные преобразователи, использующие ЭДС движения Едв, называют активными, они могут использоваться для измерения постоянных магнитных полей.
Пассивные индукционные преобразователи в простейшем случае представляют катушку. Это, как правило, короткие однослойные катушки, намотанные тонким проводом, чтобы можно было пренебречь толщиной намотки по сравнению с диаметром катушки.
В том случае, когда ось катушки в процессе измерений составляет с направлением вектора магнитной индукции угол α, мгновенная трансформаторная ЭДС будет:
![]()
где S
— площадь
одного витка катушки; w
— число
ее витков. При
измерении в слабых полях может оказаться,
что ЭДС
весьма мала. Тогда для ее увеличения
помещают внутри
катушки ферромагнитный сердечник и
магнитная индукция
в сердечнике увеличится в
![]() ,
,
где
![]() — магнитная
проницаемость тела; Nр
— коэффициент
размагничивания, определяемый
геометрическими параметрами
сердечника. В литературе приводится
следующее
выражение для магнитной проницаемости
цилиндрического
сердечника длиной l
и диаметром d:
— магнитная
проницаемость тела; Nр
— коэффициент
размагничивания, определяемый
геометрическими параметрами
сердечника. В литературе приводится
следующее
выражение для магнитной проницаемости
цилиндрического
сердечника длиной l
и диаметром d:
![]()
![]()
Выходной сигнал пассивного преобразователя с сердечником:
![]()
Коэффициент преобразования, равный множителю перед производной dH/dt, зависит от Np, т.е. в конечном счете от размеров и формы сердечника.
Кроме однокатушечных пассивных магнитных преобразователей для оценки изменений магнитной индукции в пространстве применяют двухкатушечные дифференциальные преобразователи. При встречном включении катушек выходной сигнал такого преобразователя:
![]()
Хотя преобразователи и одинаковые, но напряженность поля в области, где размещен каждый из них, может быть различной.
Существует
два основных типа активных индукционных
преобразователей (рис. 21). В одном из них
ЭДС возникает за счет изменения
скалярного произведения
![]() ,
т.е.
практически за счет изменения площади
S,
а
в другом — за счет изменения магнитной
проницаемости μт.
,
т.е.
практически за счет изменения площади
S,
а
в другом — за счет изменения магнитной
проницаемости μт.

Рис. 21. Классификация индукционных преобразователей.
Простейшим примером первого типа преобразователя является катушка (рис. 22), вращающаяся с помощью двигателя. При угловой частоте ω напряжение, снимаемое со скользящих контактов, равно:
![]()
Отсюда видно, что чувствительность можно повысить, увеличивая частоту вращения. Если измеряется только модуль выходного напряжения, то преобразователь является модульным.

Рис. 22. Измерение поля рассеяния с помощью вращающейся катушки (а) и измерительного трансформатора (б).
Электрические шумы, возникающие в скользящих контактах, можно устранить, применяя для снятия выходного сигнала трансформатор (см. рис. 22). Первичная обмотка трансформатора закреплена на валу индукционного преобразователя и вращается вместе с ним, а вторая неподвижна. Такие преобразователи позволяют проводить измерения в слабых магнитных полях (порядка 10-4 Тл) при погрешности не более единиц процентов.
Во втором типе активных индукционых преобразователей изменяется магнитное сопротивление за счет изменения положения ферромагнитного сердечника.
Обычно подвижна средняя часть сердечника, которая может вращаться вокруг поперечной оси. В этом случае измеряется коэффициент размагничивания. В результате выходной сигнал изменяется дважды за один оборот сердечника. При измерении второй гармоники можно отфильтровать наводки, создаваемые двигателем на основной частоте.
Магнитная индукционная головка — это обычный пассивный индукционный преобразователь (рис. 23), представляющий собой кольцевой магнитопровод 1 с зазором 2. На магнитопроводе размещена катушка 3. Контроль осуществляется путем перемещения магнитопровода вблизи объекта контроля 4, причем участок зазора соприкасается с поверхностью предварительно намагниченной детали.

Рис. 23. Магнитная индукционная головка.
Магнитный поток Фr, встречая трещину 5, частично огибает ее, а частично проходит по магнитопроводу. Часть этого потока Фраб проходит через сердечник и может создавать ЭДС в катушке, другая же часть создает поток рассеяния Фраб. Магнитная головка применяется как для считывания информации с магнитных лент, так и для непосредственных измерений на поверхности детали (см. рис. 23). Эффективность магнитной головки может быть оценена соотношением рабочего потока и потока рассеяния:
![]()
где lз — средняя длина магнитных силовых линий в зазоре; Sз — средняя площадь сечения, сквозь которое проходят эти линии; lс и Sc — длина и площадь сечения магнитопровода; μc — относительная магнитная проницаемость материала сердечника.
Для повышения эффективности магнитных головок сердечник изготовляют из материала с большой магнитной проницаемостью, например, из пермаллоя или феррита.
Выходной сигнал магнитной головки определяется градиентом магнитного поля вблизи зазора и скоростью перемещения головки. Это следует непосредственно из закона электромагнитной индукции. Применение магнитных индукционных головок эффективно при постоянной скорости перемещения. При изменении скорости изменяются коэффициент преобразования головки и спектр сигнала, что затрудняет ее применение.
При магнитографии, когда отпечаток магнитного рельефа вначале записывается на магнитную лешу, а затем считывается, скорость движения должна быть строго постоянна.
Действие феррозондового преобразователя основано на нелинейности кривых намагничивания сердечников. В зависимости от взаимной ориентации векторов напряженности внешнего магнитного поля и магнитного поля возбуждения преобразователя различают феррозонды с продольным и поперечным возбуждением.
Феррозонд с продольным возбуждением состоит из двух идентичных полузондов, каждый из которых содержит сердечник из магнитомягкого материала с размещенными на нем двумя катушками. Одна катушка — возбуждающая — подключается к источнику переменного тока, другая — измерительная. Схема подключения обмоток в феррозонде-полемере показана на рис. 24. Здесь обмотки возбуждения соединены встречно, измерительные — согласно. Синусоидальный ток возбуждения iВ = Imsinωt создает в сердечнике магнитное поле возбуждения HB(t) = Hmsinωt, вектор напряженности которого параллелен оси сердечника. Без внешнего поля очевидно, что характер изменения индукции в каждом сердечнике одинаков и значения индукций отличаются только знаком. Следовательно, выходной сигнал, равный сумме ЭДС в измерительных катушках, равен нулю.

Рис. 24. Схема соединения обмоток феррозонда-полемера.
При воздействии постоянного магнитного поля H0 напряженность в первом сердечнике H1(t) = HBsinωt + Н0 а во втором H2(t) = HBsinωt + Н0. В этом случае вследствие нелинейности кривой намагничивания значения индукции в стержнях становятся различными. Выходной сигнал несинусоидальной формы имеет период Ти вдвое меньше периода Тв возбуждающего тока. Это означает, что постоянное внешнее подмагничивающее поле H0 обусловливает появление второй гармоники в выходном сигнале феррозонда. Эта вторая гармоника и является информативной, по ней судят о напряженности постоянного магнитного поля. При H0 = 0 выходной сигнал феррозонда равен нулю. Рабочая часть характеристики этого преобразователя близка к линейной. Действующее значение второй гармоники U2 пропорционально напряженности Н0.
Для оценки неоднородности постоянного во времени магнитного поля используется феррозонд-градиентометр, который по устройству аналогичен феррозонду-полемеру и отличается от него соединением обмотки (рис. 25).

Рис. 25. Схема соединения обмоток феррозонда-градиентометра.
Обмотки возбуждения соединены так, что в однородном поле, т.е. при Н0' = H0", напряженность, а следовательно, и индукция в каждом сердечнике одинаковы в любой момент времени. Измерительные катушки wи' и wи" включены встречно, поэтому выходное напряжение этого феррозонда, равное разности ЭДС е1 и е2 в измерительных катушках, равно нулю. Если же напряженность поля изменяется в направлении, ортогональном направлению вектора H0, то напряженность магнитного поля Н0' не равна Н0". Это приводит к тому, что индукция в каждом сердечнике не будет одинаковой и появится выходной сигнал Uвых = e1(t) - e2(t). Амплитуда выходного сигнала пропорциональна степени неоднородности внешнего поля, т.е. величине ∆Н = Н0' – Н0".
Магнитодоменпый преобразователь представляет собой однородную магнитную среду определенной толщины, в которой домены (однородные области, обладающие одинаковой намагниченностью), ориентируются в зависимости от магнитного поля рассеяния, создаваемого дефектами в изделиях из ферромагнитных материалов. Действие преобразователя основано на магнитооптическом эффекте [32].
Применяемые в настоящее время магнитодоменные преобразователи основаны на визуализации топографии магнитного поля с помощью феррит-гранатовой магнитной пленки. Нa рис. 26 показана доменная структура такой пленки, размещенной на бездефектном участке ферромагнитного объекта, а на рис. 27 — доменные структуры пленки, находящейся над дефектом типа «трещина».
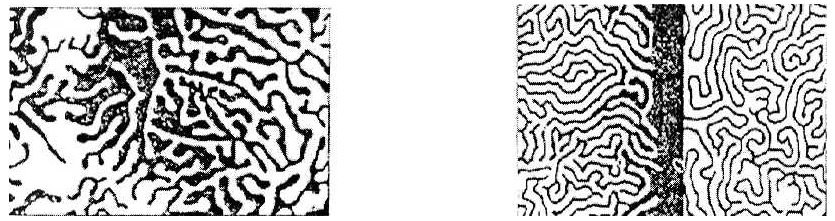
Рис. 26. Магнитодоменная структура Рис. 27. Магнитодоменная структура
на бездефектном участке детали. размещенной на участке детали c трещиной.
Изменение доменной структуры происходит под влиянием магнитных полей рассеяния. Оценка этих изменений производится так, как показано на рис. 28.

Рис. 28. Измерительная установка с магнитодоменным преобразователем.
Здесь световой поток от источника света 1 проходит через поляризатор 2 и с помощью полупрозрачного зеркала 3 освещает магнитную пленку 4 плоскополяризованным светом. При прохождении плоскополяризованного света через магнитную пленку направление поворота поляризации света зависит от направления намагниченности пленки. Пройдя через пленку и отразившись от зеркального покрытия 5, световой поток вторично проходит через нее, что приводит к удвоению угла поворота плоскости поляризации.
После этого через полупрозрачное зеркало 3 свет попадает на анализатор 6,
изображение на выходе которого зависит от плоскости поляризации света и, следовательно, определяется доменной структурой. Доменная структура определяется свойствами ферромагнитного образца 7 и, кроме того, может изменяться с помощью электромагнита 8.
Устройство магнитодоменного преобразователя иллюстрирует рис. 29.

Рис. 29. Магнитный преобразователь.

Рис. 30. Схема (а) магнитооптического [35] визуализатора (б), его использования (в) для обнаружения мелких трещин (г).
Основным элементом преобразователя является висмутсодержащая феррит-гранатовая магнитная пленка 1, выращенная на подложке 2 из галлий-гадолиниевого граната. На пленку нанесен отражающий слой 3, закрытый предохраняющим слоем 4. Для управления доменной структурой служит катушка 5, по которой может быть пропущен ток.
Информативным параметром магнитодоменного преобразователя является видимое изображение доменной структуры магниточуствительной пленки. Под влиянием внешнего подмагничивающего поля доменная структура пленки изменяется. Междоменные границы занимают положение, соответствующее минимуму магнитной энергии пленки.
На работу магнитодоменного преобразователя влияют два основных фактора: параметры пленки и положение доменных границ в зависимости от напряженности поля подмагничивания.
Чувствительность используемых пленок составляет 10 А/см и определяется коэрцитивной силой доменных границ, характеризующейся напряженностью магнитного поля, при которой доменная граница начинает изменяться. Наряду с магнитными важную роль играет оптическая характеристика пленки — магнитооптическая добротность Ψ.
В дефектоскопии используют висмутсодержащие феррит-гранатовые эпитаксимальные пленки с низкой коэрцитивной силой и намагниченностью насыщения Ms = 1... 12 мТл. Толщина пленки 6 мкм, магнитооптическая добротность более 40°, ширина доменной структуры 10 мкм.
Для регистрации магнитных полей рассеяния от дефектов используются различные типы рассмотренных выше преобразователей, однако наибольшее применение нашли магнитные порошки, обеспечивающие достаточно высокую чувствительность, если чистота обработки поверхности соответствует 6...7-му классу шероховатости.
На рис. 30 показано применение магнитооптических приборов в авиации [34].