

ПособиеМПЭВС_ч2
.pdf4.8 Контрольные вопросы по главе 4 |
141 |
4)Какой формат соответствует асинхронному последовательному обмену?
5)Какой формат соответствует синхронному последовательному обмену?
6)Какова область применения асинхронного последовательного обмена?
7)Какие атрибуты соответствуют протоколу последовательного обмена?
8)Какой алгоритм управления соответствует адаптеру 580ВВ51А?
9)Что есть интерфейс? Какие критерии классификации установлены?
10)Какие интерфейсы выделяются по конструктивному исполнению?
11)Какие характерные черты и область применения имеет интерфейс SPI?
12)Какие характерные черты и область применения имеет интерфейс I2C?
13)По каким критериям классифицируются прерывания МПС?
14)Какими параметрами характеризуется режим прерываний МПС?
15)Какой ресурс требуется для формирования уровней прерывания по общему (одноуровневому) входу запросов INTR МПК?
16)Какие возможности организации прерываний с входа INTR предоставляет программируемый контроллер 580ВН59?
17)Какие возможности организации ПД предоставляет программируемый контроллер 580ВТ57?
Разделы 4.4–4.7
1)Какие компоненты состава МПС относится к специализированным?
2)Какое назначение имеет таймер в МПС? Компоненты состава таймера?
3)Какой режим взаимодействия таймера с МПК в составе МПС? Мотивы?
4)Какие атрибуты соответствуют ПМ таймера?
5)Какой интерфейс подключения к МПК соответствует ЦАП?
6)Какие атрибуты имеет ПМ ЦАП?
7)Какой интерфейс подключения к МПК соответствует АЦП?
8)Какие атрибуты имеет ПМ АЦП?
9)Какой состав должны иметь устройства контроля и регулирования режимов с МПК?
10)Какие характерные черты соответствуют ОМЭВМ?
11)Какое назначение в составе ОМЭВМ отведено РСФ?
12)Какие отличительные черты характерны для МЦП ОМЭВМ?
13)Какой состав и какие особые черты имеют комплексы с ЦПОС?
14)С какими проблемами связано применение секционных МП?
15)Какие сигнальные связи секций должны согласовываться при соединении секций? При каких условиях согласование не требуется?

Глава 5
ВНЕШНИЕ УСТРОЙСТВА МПС
5.1 Периферийные устройства ввода-вывода
5.1.1 Классификация ПУ по назначению
Периферийные устройства ввода/вывода предназначены для соединения центральных устройств с внешними источниками и потребителями информации. Эти устройства оснащаются собственными контроллерами и с центральным процессорным узлом поддерживают связь по параллельному или последовательному интерфейсу [5, 9]. Через ПУ обеспечивается согласование низкой скорости восприятия и генерации информации человеком (или медленных изменений состояния внешней среды) как источником или приёмником информации и быстродействующей подсистемой ввода-вывода (УВВ) процессора. Обмен информацией ПУ с процессором обеспечивается по мультиплексным или селекторным каналам взаимодействия. Контроллеры ПУ обеспечивают местное управление объектами их состава, формируют массивы данных и управляют их транспортом к центральному процессору или от него к своим накопителям.
Периферийные устройства выполняют функции:
•средств оперативного диалога оператора с ЭВС с учётом специфики органов чувств (осязания, зрения, звука и речи);
•средств регистрации данных на промежуточных носителях (например, магнитные, оптические носители) для длительного хранения информации в виде, пригодном для последующего использования в ЭВС или в виде, удобном для использования человеком (печатный текст, графика);
•средств автоматического ввода-вывода через АЦП и ЦАП, читающие автоматы (сканеры) и устройства внешней памяти на промежуточных носителях информации.

5.1 Периферийные устройства ввода-вывода |
143 |
На рисунках 5.1 и 5.2 приведен примерный состав устройств ввода и вывода соответственно. В проектировании ПУ непосредственного взаимодействия оператора с процессором подлежат учёту эргономические показатели человека по восприятию, сохранению, переключению состояний в диалоге с внешней средой.
Рис. 5.1 – Состав ПУ ввода информации
Рис. 5.2 – Состав ПУ вывода информации
За короткий период наблюдения человек может запомнить и повторить названия до (5–9) объектов. Около 70% информации человек воспринимает зрительными органами. Пропускная способность сетчатки глаза оценивается на уровне до 107 бит/с, но число одновременно воспринимаемых операторами предметов с отличиями формы не превышает 5–9. Опытным путем получены средние значения пропускной способности при чтении текстов «молча» (5–6) символов/сек, при чтении с озвучиванием (3–4) символа/с, в корректорской работе (2–3) символа/сек, при наборе на клавиатуре (1–2) символа/сек.
Скорость уверенного восприятия человеком звуковой информации зависит от связанности звуковых символов в сообщении и частоты основного тона символа. Длительность звучания тона не должна быть менее (10–20) периодов тона (но не менее 1/16 сек). Для тональных сигналов частоты 50 Гц период равен 20 мС и (10– 20) периодов составят (200–400) мС, т.е допускают различимое восприятие тона
144 |
Глава 5. Внешние устройства МПС |
при длительности (0,5–0,25) сек с пропускной способностью (2–4) звуковых символа за секунду, Для частот более 200 Гц может достигать 6–8 звуковых символов за секунду. Тональные составляющие речевого сигнала не имеют чётких границ, и скорость уверенного восприятия звуковых символов не превышает (1–2) символа/сек.
Регистрирующие и считывающие автоматизированные и автоматические ПУ создают или считывают текстовые, графические документы с носителей с использованием механического транспорта «пишущих», «читающих» инструментов. Читающие автоматы могут быть предназначены для озвучивания текстовых документов и, наоборот, для преобразования звуковых сообщений в алфавит текстовых команд языковой среды программирования управления. Работа оператора и работа имитирующих её автоматов имеют много общего по составу поддерживающих их средств.
Начало 21-го века ознаменовалось «взрывным» внедрением в практику взаимодействия человека ЭВС — технических средств индивидуального и коллективного отображения текстовой и графической информации в удобных для пользователя формах. Это плоские экраны отображения, плоские планшеты отображения, совмещённые с сенсорными панелями ввода управляющих действий «грубой (размытой)» навигацией перемещения, «перетаскивания» фрагментов по планшету, выбора фрагментов, листания страниц графического или текстового вывода. Технические решения, применяемые в этих устройствах, прорабатывались с конца 50-х годов 20-го столетия, благодаря достижениям технологии стали реальностью в 21-м веке.
5.1.2 Устройства тактильного ввода информации
Средствами тактильного ввода являются клавишные модули и сенсорные поля с «виртуальными клавишами». Локальное воздействие на контактную клавишу или сенсорный «датчик» с помощью координатного указателя связывается с пространственным расположением активизируемой точки. Клавишные модули (клавиатура) преимущественно реализуются на электромеханических сухих контактах открытой или герметизированной (герконы) конструкции. Состояние контактов (замкнуторазомкнуто) считывается контроллером. Конструкции клавиатур при общности функционального назначения разнообразны. Известным недостатком электромеханических тактильных датчиков клавишных модулей является неустойчивость замыкания контактов на начальном этапе (дребезг). В конструкциях и сопутствующих аппаратно-программных решениях клавишных модулей ПУ применяются разнообразные методы преодоления этого недостатка. Вместо электромеханических контактных датчиков в клавиатурах применяются оптико-механические, магнитные и сенсорные датчики. Преобразование и идентификация тактильного действия иллюстрируется типовой схемой, показанной на рисунке 5.3.
На схеме показана матричная сетка ортогональных линий размерности 8х8, на пересечениях линий которой устанавливаются контакты SAi или иные датчики тактильного действия. Для идентификации замкнутого контакта контроллер местного управления программно заносит в регистр DD1 код с активным низким уровнем состояния одной из разрядных линий выхода. Состояния вертикальных линий матрицы периодически считываются контроллером через формирователь DD2. При

5.1 Периферийные устройства ввода-вывода |
145 |
Рис. 5.3 – Матричная схема сенсорного поля тактильного ввода
замыкании контактов SAi (или иных сенсоров тактильного действия) на вертикальных линиях, пересекающих активированную горизонталь, считывается низкий уровень. Это состояние позволяет программно идентифицировать номер замкнутого контакта. Расширение размерности матричного поля по горизонталям достигается установкой двоичного дешифратора между регистром DD1 и горизонталями матрицы.
При этом для активации горизонталей в регистр DD1 следует загружать двоичный код активируемой горизонтали. Дешифратором 8х256 формат контролируемого матричного поля расширяется до 256х8 (вместо 8х8 для схемы на рисунке 5.3). Датчиками тактильного ввода для схемы на рисунке могут быть оптические, магнитные, пьезоэлектрические, потенциальные преобразователи «тактильное действие — состояние замыкания». Развитием схемы на рисунке 5.3 является планшет кодирования координат рабочего поля планшета, показанный на рисунке 5.4.
На планшете число горизонталей и вертикалей увеличено в соответствии с требованиями дискретности отсчёта координат на планшете по горизонтали и вертикали. Например, при размерах рабочего поля планшета, соответствующих формату А3 (420х300), при погрешности определения координат 1 мм количество линий матрицы по горизонтали и вертикали должно составлять 420х300, что будет соответствовать ширине линий матрицы не более 0,5 мм. Для локального контроля активируемого пересечения линий матрицы применяется локальный битовый регистратор (съёмник) сигнала в пересечениях матрицы либо в виде щупа с миниатюрным датчиком, либо в виде подвижной платформы с датчиком в перекрестии оптического визира.
На ручном съёмнике (или на платформе) предусматривается дополнительно датчик активизации режима съёма координаты. На матрицу ортогональных шин размерности m (300) строк и n (420) столбцов с дешифраторов DCx и DCy после-

146 |
Глава 5. Внешние устройства МПС |
Рис. 5.4 – Схема устройства пространственной локализации (навигации) места сенсорных воздействий
довательно подаётся напряжение активации шин. Счетчики CTx и CTy выполняют счёт тактовых импульсов генератора G так, что после переполнения счётчика столбцов CTy переключается счётчик строк CTx. Дешифраторы DCx, DCy подключают в активном состоянии шины X и Y к низкому уровню шины питания. Вторые концы шин подключены через токоограничивающие подтягивающие резисторы к высокому уровню шины питания. В зоне касания щупа при активизации линий матрицы на датчике образуется модуляционный фон. Этот фоновый сигнал выделяется детектором сенсорной реакции, нормализуется и, по появлению, сбрасывает триггер
Tи блокирует подачу счётных импульсов в счётчики CTy, CTx. Состояние триггера
Tопрашивается контроллером или инициирует прерывание для вызова подпрограммы МК считывания состояний счётчиков CTy, CTx и определения координат активированного места на сенсорной панели. Той же подпрограммой по входу S (линия б) триггер T переводится в состояние разрешения тактирующих сигналов с элемента &1, и процесс сканирования сенсорного поля будет продолжаться.
Планшет может применяться для ручного цифрового кодирования (digitizer — дигитайзер) графических документов. Эти устройства предназначены для ручного ввода разнообразных графических документов (электрических схем, строительных чертежей, геодезических карт, машиностроительных чертежей и пр.). Сигнал с линий матрицы рабочего поля (см. рисунок 5.4) может быть недостаточным для чёткого детектирования и срабатывания триггера T. Повышение уровня сигнала на шинах рабочего поля достигается модуляцией активных уровней с дешифраторов частотным сигналом. Тензор-съёмник сигнала выполняется как ёмкостный, индуктивный, оптический, ультразвуковой датчик сигнала в узле пересечения линий
5.1 Периферийные устройства ввода-вывода |
147 |
матрицы. Для визуального контроля процесса кодирования графических документов дигитайзеры оснащаются устройством отображения и клавиатурой с типовым составом портов записи и считывания. После доставки в ЭВМ кадров оцифровки графических образов последующая обработка и преобразование к выводу на экран для оперативного контроля и печатающие устройства для документирования осуществляются на программном уровне с применением линейной и круговой интерполяции, языковой среды графического представления результатов. Достоинством матричной схемы навигации активного датчика является гарантированная сеткой точность. Недостатком является большое число линий связи с матричной сеткой. Способом решения этой проблемы является применение резистивных панелей с локализацией активированной координаты контролем изменения токов в углах одного резистивного слоя или по ортогональным граням двух разделённых резистивных слоёв. Точность определения координат в таких конструкциях ниже, чем в матричных. Она приемлема для средств с допустимой «размытой» навигацией сенсоров.
5.1.3 Устройства речевого ввода информации
Речевой ввод в микропроцессорные системы удобен в условиях слабой освещенности рабочих зон, при проблемах доступности тактильных средств ввода и в экстремальных ситуациях управления.
Процесс ввода речи состоит из этапов анализа, идентификации и кодирования речевых сигналов к форме подобной тактильному вводу. Для анализа речь разделяется на элементы — фонемы, элементарные различительные по смыслу единицы обозначения конкретного звука устной речи. Анализаторы речи подразделяются на два класса:
•анализаторы сигналов;
•анализаторы сообщений.
Ванализаторах сигналов непрерывный сигнал, как есть, преобразуется в цифровую форму и вводится МПС. Сжатие потока сигналов с микрофона выполняется
сучетом акустических и статистических характеристик речевого сигнала без обращения к его смысловой функции.
Ванализаторах речевых сообщений осуществляется сжатие информационного потока на основе операции распознавания смысловых элементов речи (фраз, слов, фонем, морфем). В свою очередь, анализаторы речевых сообщений делятся на две группы: с ограниченным словарем и универсальные. Анализаторы ограниченного словаря идентифицируют одну из (не более 100) речевых команд словаря сопоставлением эталонов команд с произносимой командой. Универсальные анализаторы используют ресурсы «лингвистического процессора» и выполняют текущее распознавание по полному набору смысловых элементов речи (фонем или морфем).
5.1.4 Устройства автоматического считывания текстов и графиков
Устройства автоматического ввода текстов называются читающими автоматами или сканерами и построены на принципах распознавания образов (примитивов) ограниченного алфавита. На рисунке 5.5 приведена схема, поясняющая организацию автомата кодирования для символов алфавита (пример для цифры 2). Процесс

148 |
Глава 5. Внешние устройства МПС |
распознавания образов символов состоит из трех этапов. Первый этап выполняется аппаратно и является этапом отбора признаков. На этом этапе используется набор бинарных датчиков (рецепторов), которые реагируют на перекрытие датчиками (ленточными фоторезисторами или фотодиодами) контура примитивов алфавита
впроходящем или отражённом свете. Вторым этапом является распознавание путём сравнения кода вводимого образа с кодами эталонов (шаблонов) базы эталонных образов и присвоение образу имени (идентификация). Третий этап состоит
впреобразовании кода распознанного образа в машинный код (этап кодирования). Считываемые кодовые комбинации отличаются друг от друга наличием «0» и «1»
вразных разрядах. Отличие между двумя кодами называется кодовым расстоянием d и измеряется числом разрядов с противоположными значениями битов. Например, цифре 3, для приведенных на рисунке 5.5 рецепторов, соответствуют
состояния (1 1 1 1 0 0 1), а цифре 5 — состояния (1 0 1 1 0 1 1). Между цифрами 3 и 5 кодовое расстояние равно 2, так как не совпадают значения во втором и шестом разрядах кодов. С целью повышения достоверности считывания значение кодового расстояния следует повышать. Повышению кодового расстояния способствует стилизация символов по форме представления, как преднамеренное изменение начертаний символов с целью увеличения кодового расстояния между кодовыми комбинациями. Другой путь увеличения кодового расстояния — применение избыточности кодирования и соответственно дополнительных рецепторов в отборе признаков.
Рис. 5.5 – Структура устройства распознавания контурного образа
В считывающих устройствах необходимым является управляемый транспорт документа с образами алфавита относительно считывающих датчиков либо управляемый транспорт считывающих датчиков относительно документа. В качестве средств управляемого транспорта применяются электромеханические устройства и средства сканирования текстов электронными, лазерными лучами. Сканирование документов лучами многократно превосходит по скорости электромеханический транспорт и применяется в высокоскоростных устройствах. Недостатками электронно-лучевых сканеров являются высокие рабочие напряжения (киловольты для электронно-лучевых сканеров) и большие габариты, которые при лазерном сканировании могут быть снижены уменьшением размеров зоны сканирования.
5.1 Периферийные устройства ввода-вывода |
149 |
Оптический модуль лазерного сканирования для расширения зоны считывания размещается на подвижной платформе, но при этом скорость считывания становится зависимой от скорости электромеханического транспорта.
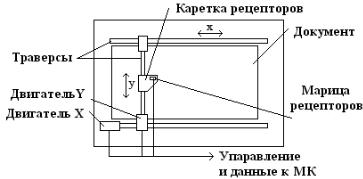
Устройства считывания с электромеханическим транспортом строятся по схеме, в которой платформа рецепторов перемещается относительно неподвижного считываемого документа на планшетах (см. рисунок 5.6) или относительно подвижного документа при барабанной протяжке.
Рис. 5.6 – Сканер планшетного типа
Платформа (каретка) с матрицей рецепторов транспортным механизмом приводится в движение вдоль траверсы в пределах считываемой строки текста. После завершения считывания текущей строки каретка возвращается в начальное положение на траверсе (возможен вариант считывания на возврате в начальное положение). Оба крайних положения на траверсе ограничены концевыми датчиками бинарных состояний.
Скорость распознавания символа составляет (3–8) мС/символ. Результатом идентификации и обработки является код символа определённого шрифта по размеру и форме символа, и в таком виде он включается в таблицу символов текста для дальнейшего использования.
Для работы с полутоновыми образами средства считывания состояний рецепторов должны оснащаться детекторами градаций уровня от «серого» к «чёрному». На аппаратном уровне это соответствует применению аналого-цифрового преобразователя «уровень чёрного — код» для состояния каждого рецептора. На уровне программной идентификации этот процесс сопровождается повышением числа операций и времени считывания кратно числу элементов матрицы рецепторов. Для работы с цветными образами проецируемый поток должен подаваться к рецепторам оптического узла считывания, количество которых увеличивается соответственно в три раза, а при переключениях одного общего преобразователя на оцифровку каждого из трёх цветов увеличивается в девять раз по сравнению с вводом полутоновых изображений.
Считывание контурных графических изображений в виде непересекающихся линий, снижение затрат времени на обработку изображений, улучшение показателей сжатия объёма кодированных данных может быть достигнуто применением сканирования контуров в полярной системе координат. Для этого полюс полярной системы координат размещается внутри сканируемого контура потенциально ближе к центру «масс» контура. Рецепторы считывания устанавливаются на радиальной
150 |
Глава 5. Внешние устройства МПС |
траверсе, которая для сканирования контура транспортным механизмом поворачивается вокруг полюса. Программная реализация обработки считанных данных для идентификации контурных линий, считанных в полярных координатах, называется методом последовательного выделения и кодирования контуров (метод изопараметрических линий).
5.1.5 Устройства оперативного визуального вывода информации
Простейшими устройствами оперативного вывода информации контроллеров и МПС являются двоичные световые индикаторы, источники вывода тональных сигналов, простейшие индикаторы на сегментных табло. По их состояниям «да/нет» обеспечивается диалог пользователей с МК и МПС. В качестве средств оперативного отображения (визуализации) текстовой и графической информации широкое распространение получили устройства визуального отображения (display) — дисплеи. Основу дисплея составляет преобразователь электрических сигналов в изображении текстовой либо графической информации. Дисплеи располагаются в непосредственной близости от центральных процессорных средств МПС или функционируют в автономном режиме. Коды отображаемых символов и элементов чертежа передаются в запоминающее устройство дисплея из центральных средств МПС, а далее аппаратными или аппаратно-программными ресурсами транслируются на экраны преобразователей в изображения. Преобразователи изображения классифицируются по критериям:
•способа генерации элементов изображения (лучевые, электродные);
•природы физических явлений генерации изображения (плазменные, электролюминесцентные, светодиодные, жидкокристаллические);
•способа генерации образов (точечные, растровые, функциональные).
Лучевой способ преобразования электрических сигналов в видимое изображение реализован в электронно-лучевой трубке (ЭЛТ), предложенной в начале 20-го века. Недостатками ЭЛТ для целей оперативного отображения символьной
играфической информации являются:
•зависимость пространственного размера по пути распространения луча к экрану от размера экрана;
•высокие температуры нагрева, напряжённый тепловой режим и низкая надёжность источников электронов ЭЛТ, высокое энергопотребление;
•высокие (тысячи вольт) фокусирующие и ускоряющие луч напряжения и угроза поражения электрическим током при эксплуатации;
•повышенный электромагнитный фон системы электропитания и вредное для здоровья пользователя радиационное излучение.
Перечисленные недостатки привели к вытеснению ЭЛТ из низковольтного оборудования и способствовали распространению электродных элементов формирования изображений.
Электродные конструкции дисплеев позволяют реализовать плоские конструкции (дисплейные панели) преобразователей электрических сигналов в видимые изображения. Электродные дисплеи разделяются на светоизлучающие (активные)