

МИНГИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
ГОУ ВПО «Пензенский государственный университет
архитектуры и строительства»
Автомобильно-дорожный институт
Кафедра механизации и автоматизации производства
Расчетно-пояснительная записка к курсовому проекту по тмм
на тему
Проектирование и исследование механизмов колесного трактора
Выполнил: Абрамейцев А.А.
Проверил: Сёмов И.Н.
Пенза 2011
Содержание
I. Структурный анализ и кинематическое исследование рычажного механизма…………………………………………………………………………
Структурный анализ механизма……………………………………………..
Синтез механизма…………………………………………………………….
Построение схемы и исследование движения звеньев механизма………..
Построение планов скоростей………………………………………..………
Построение планов ускорений……………………………………………….
Построение кинематических диаграмм……………………………………
II. Силовой расчет механизма………………………………………………..
Определение нагрузок на звенья механизма……………………………...
Определение реакций в кинематических парах механизма……………...
2.2.1 Силовой расчет группы звеньев 4 – 5………………………………..
2.2.2 Силовой расчет группы звеньев 2 – 3…………………………………
2.2.3 Силовой расчет ведущего звена…………………………………...…..
2.3 Определение Ру методом жесткого рычага Н.Е. Жуковского…….………
III. Проектирование кулачкового механизма с плоским толкателем…..
3.1 Задание и данные для расчетов………………………………………..……
3.2 Построение диаграмм движения толкателя…………………………..……
3.3 Определение минимального радиуса профиля кулачка…………………..
3.4 Построение профиля кулачка………………………………………………
IV. Проектирование кинематической схемы планетарного редуктора и построение картины эвольвентного зацепления зубчатых колёс…...…..
4.1 Описание схемы зубчатого механизма………………………………….…
4.2 Подбор чисел зубьев планетарного редуктора………………………….…
4.3 Построение схемы редуктора………………………………………….…....
4.4 Построение картины скоростей и плана угловых скоростей редуктора....
4.5 Построение картины эвольвентного зацепления…………………...……..
4.6 Определение коэффициента перекрытия…………………………….……
ЛИТЕРАТУРА…………………………………………………………………..
Лист №1
I. Структурный анализ и кинематическое исследование рычажного механизма.
Исходные данные:
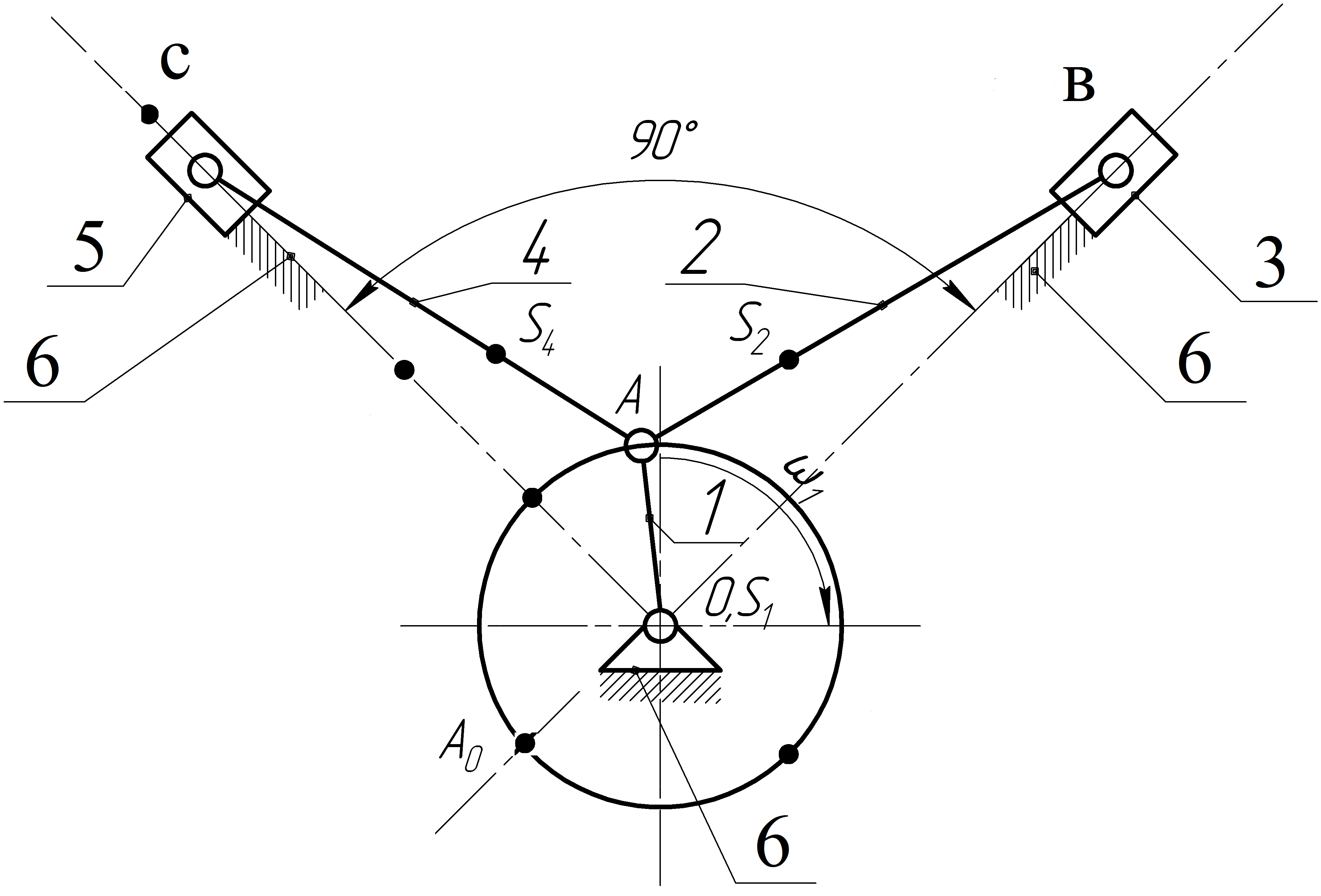
α=90°;
ОА=0,08м;
АВ=АС=0,155м;
AS2=AS4=AB/3;
m2=m4=3,0 кг;
m3=m5=2,8кг;
JS2= JS4=0,02кг∙м
Pмакс=5,6 МПа;
D=0,14 мм;
![]() ;
;
1.1 Структурный анализ механизма
Механизм включает в себя 5 звеньев:
1 – кривошип, 2,4 – шатун, 3,5 – ползун, 6 – стойка.
Всего 5 подвижных звеньев в данном механизме.
Соприкосновение звеньев и их относительное движение образуют кинематическую пару (КП).
6,1 (стойка – кривошип) это вращательная КП, низшая, 5 класс.
1,2 (кривошип шатун) это вращательная КП, низшая, 5 класс.
1,4 (кривошип – шатун) это вращательная КП, низшая, 5 класс.
2,3 (шатун – ползун) это вращательная КП, низшая, 5 класс.
4,5 (шатун – ползун) это вращательная КП, низшая, 5 класс.
3,6 (ползун – стойка) это вращательная КП, низшая, 5 класс.
5,6 (ползун – стойка) это вращательная КП, низшая, 5 класс.
Всего 7 кинематических пар в данном механизме.
Определяем степень подвижности механизма по формуле П.Л. Чебышева:
W=3n-2p5-p4,
где n=5 – число подвижных звеньев;
p5=7 – число кинематических пар пятого класса;
p4=0 – число кинематических пар четвертого класса.
Определяем класс механизма. Для этого разложим механизм на группы Ассура, на начальный механизм (W=1) состоящие из 1-го входного звена и
1-й кинематической пары. И простейшие структурные группы (W=0) состоящие из 2-х звеньев и 3-х кинематических пар.
Разложение механизма на группы Ассура и определение класса механизма выполнено согласно классификации Ассура – Артоболевского.
В таблице 1 приведен рычажный механизм V-образного двигателя внутреннего сгорания, разложенный на группы Аcсура (при разложении на группы Ассура следует обязательно соблюдать взаимное расположение звеньев).
Таблица 1
Структурное исследование механизма
|
№-№ звеньев |
Схема структурной группы и механизма 1-го класса |
Класс |
Порядок |
Вид |
|
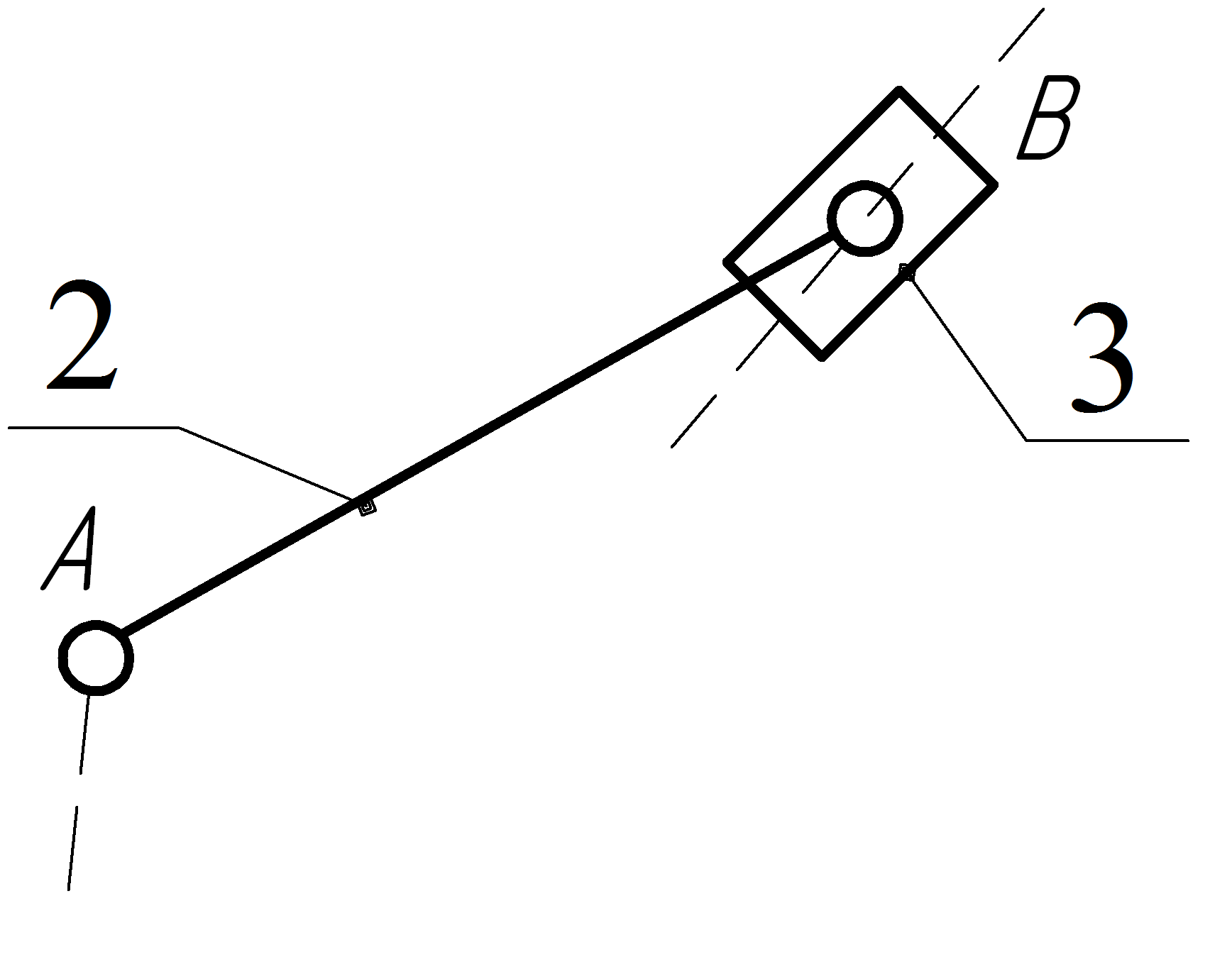
2,3 |
|
2 |
2 |
2 |
|
4,5 |
|
2 |
2 |
2 |
|
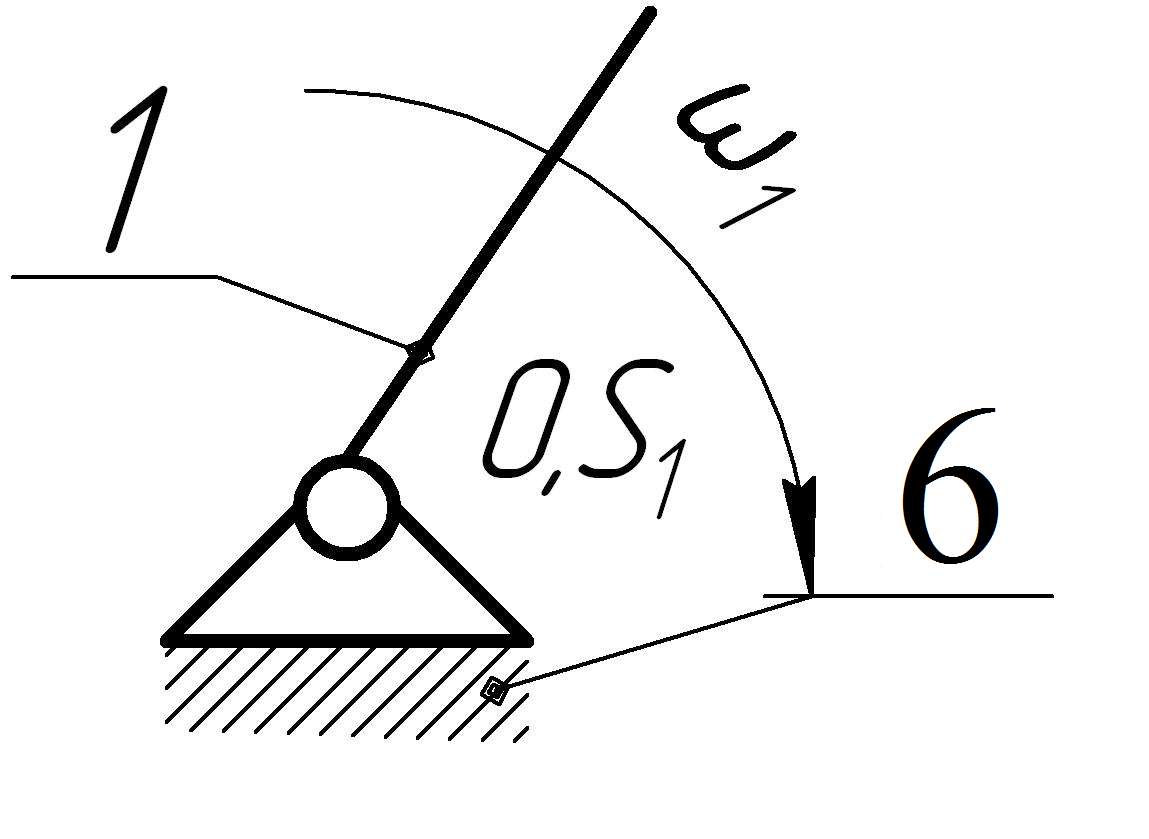
1,6 |
|
1 |
1 |
- |

Класс механизма определяется наивысшим классом группы Ассура которая входит в состав механизма.
Рассматриваемый механизм 2-го класса.
Формула строения механизма запишется в следующем виде:
![]() II(2,3)
II(2,3)
I(6,1)
II(4,5)