

Схваты промышленных роботов
.pdfРис. 9. Схват с пневмоприводом для плоских деталей
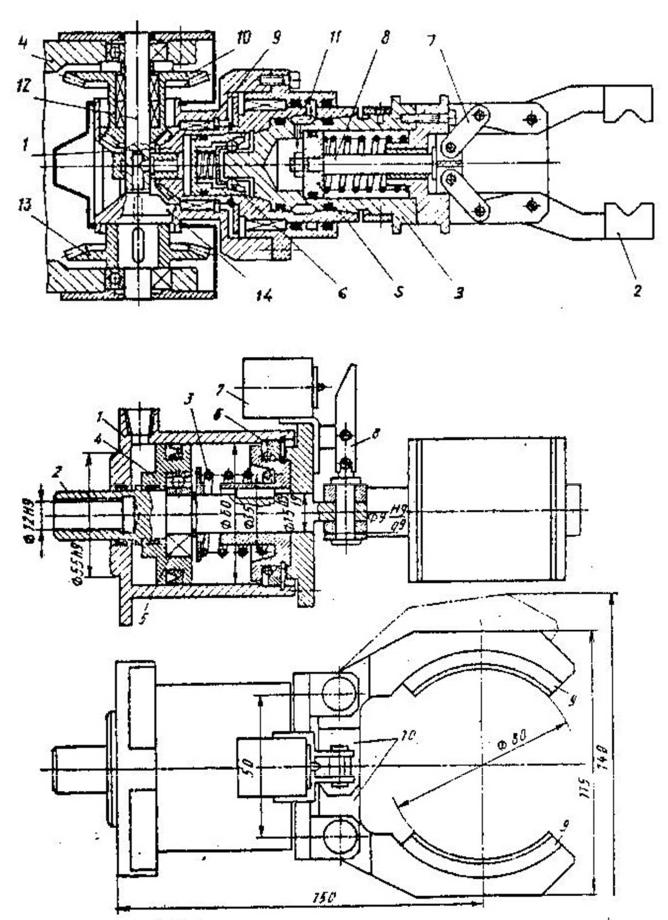
Рис. 10. Автоматическое сменное захватное устройство [9]
Рис. 11. Схват для робота агрегатно-модульной конструкции [5]
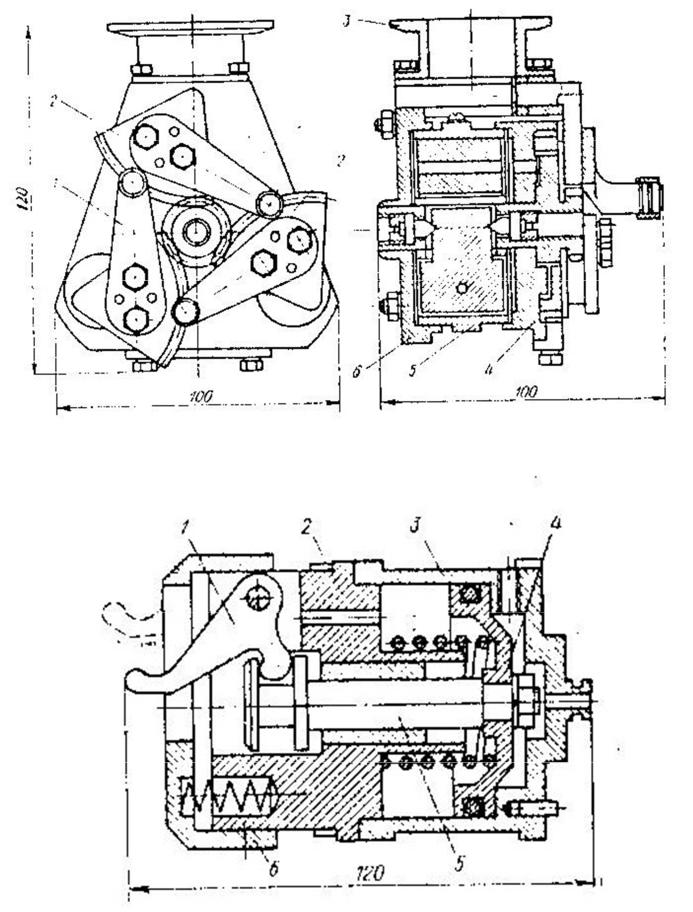
Рис. 12. Трехкулачковый широкодиапазонный схват с поворотным пневмодвигателем для деталей типа втулок, колец [14]
Рис. 13. Схват ПР «Бриг-10» для деталей типа втулок [14]
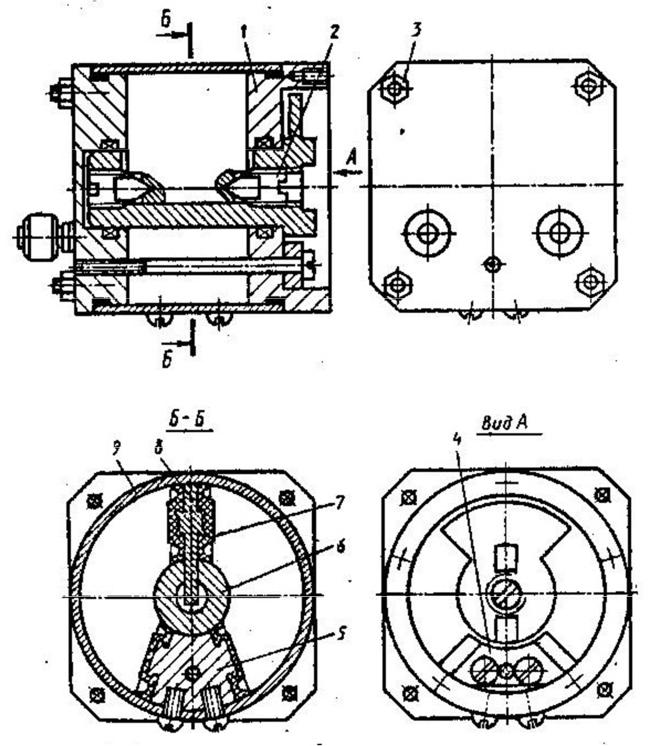
Рис. 14. Поворотный пневмодвигатель (модуль ротации) [6]
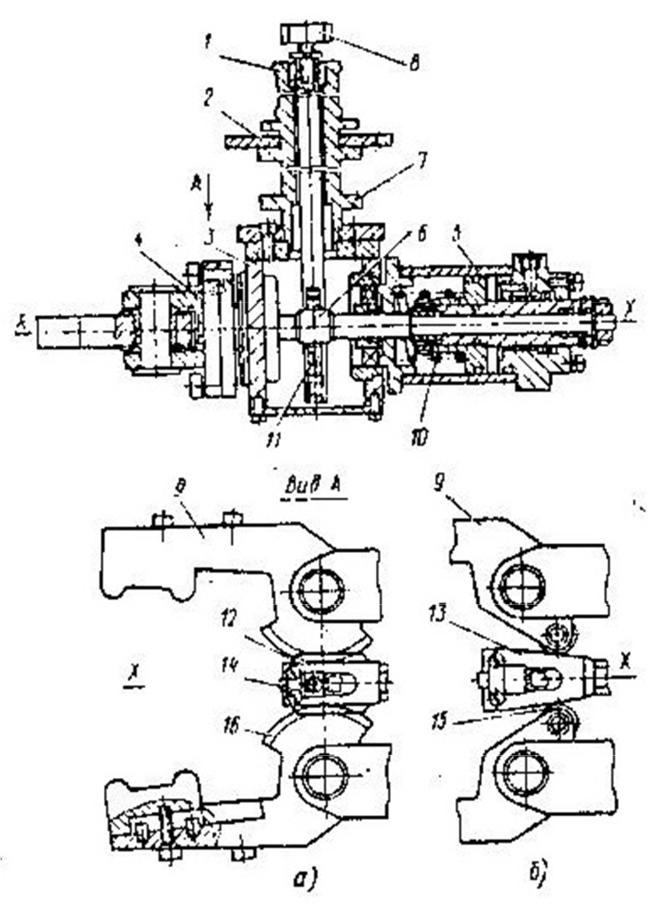
Рис. 15. Широкодиапазонный схват с возможностью кантования
детали на 180 [3]
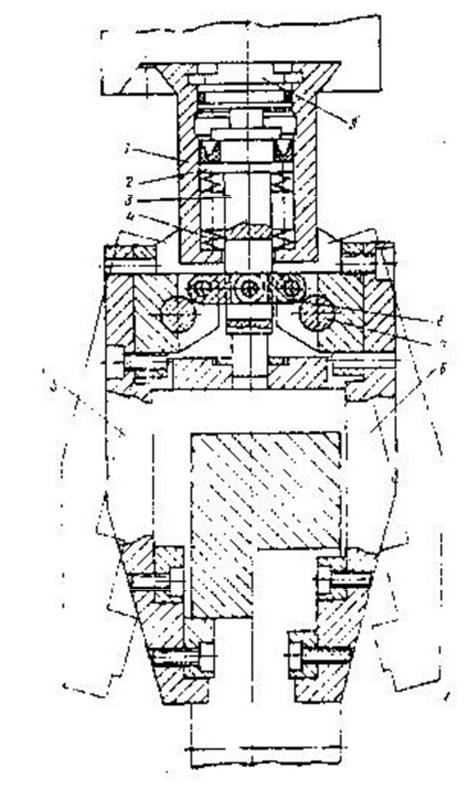
Рис. 16. Схват для деталей типа фланцев с выточкой
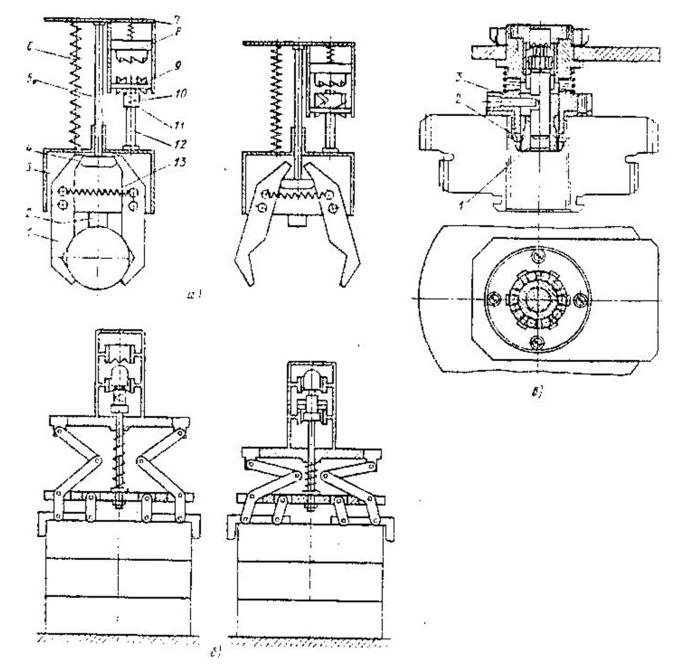
Рис. 17. Бесприводные механические захватные устройства со стопорными механизмами: а для валов;
бдля деталей типа фланцев, зубчатых колес и втулок из стопы;
вузкодиапазонный схват для захватывания деталей за отверстие [3]
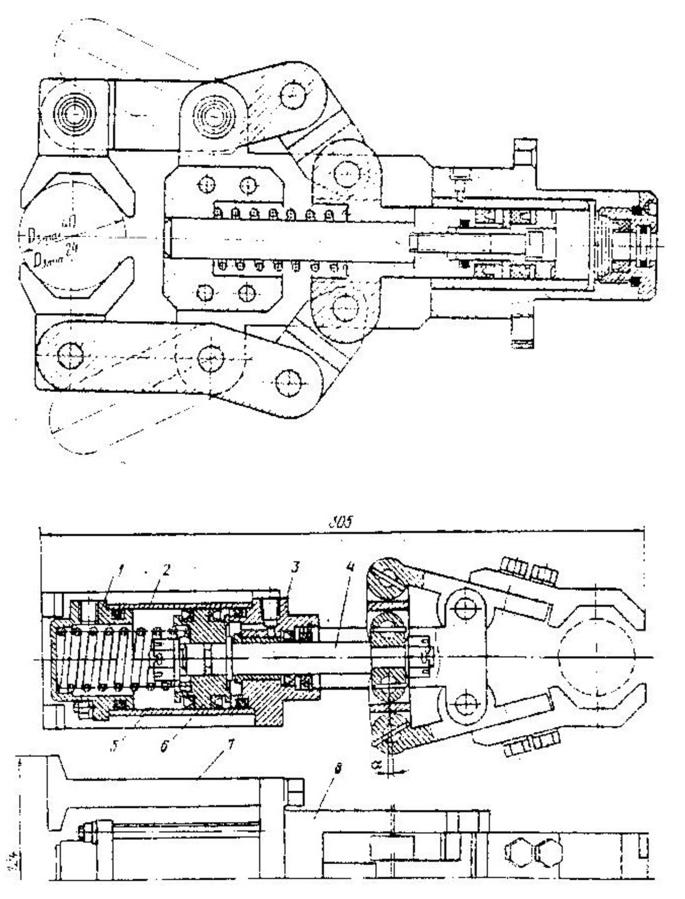
Рис. 18. Схват для валов, втулок робота “Сатурн-МГ”
Рис. 19. Конструкция схвата ПР модели Р505 для деталей типа валов [14]
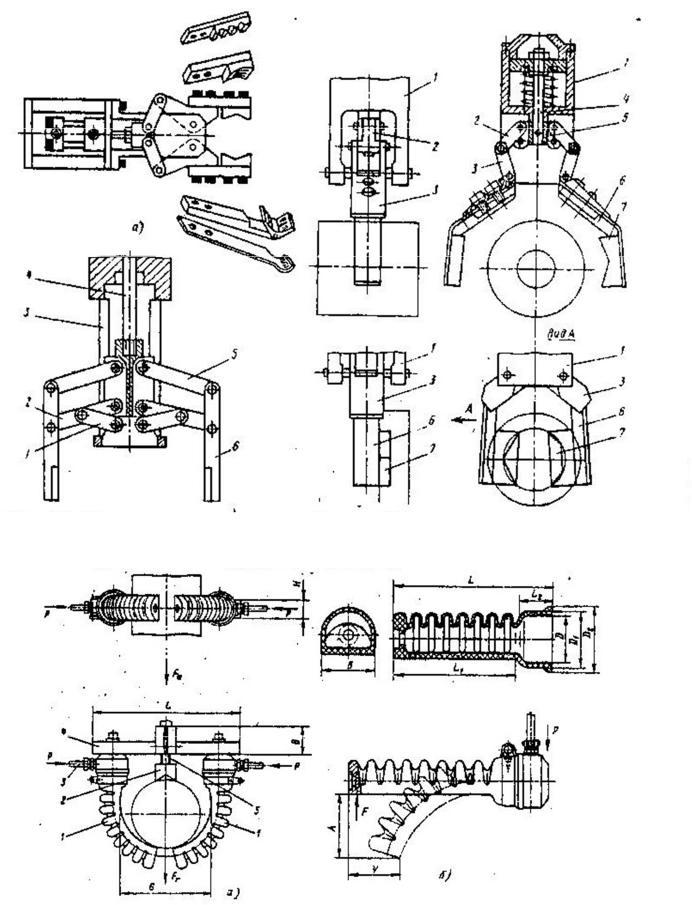
Рис. 20. Широкодиапазонные механические ЗУ с рычажными передаточными механизмами и пневматическим приводом [3]
Рис. 21. Базирующие ЗУ с нагибающимися камерами фирмы Simrit (ФРГ) для захватывания объектов за наружную поверхность [3]
Приложение 3
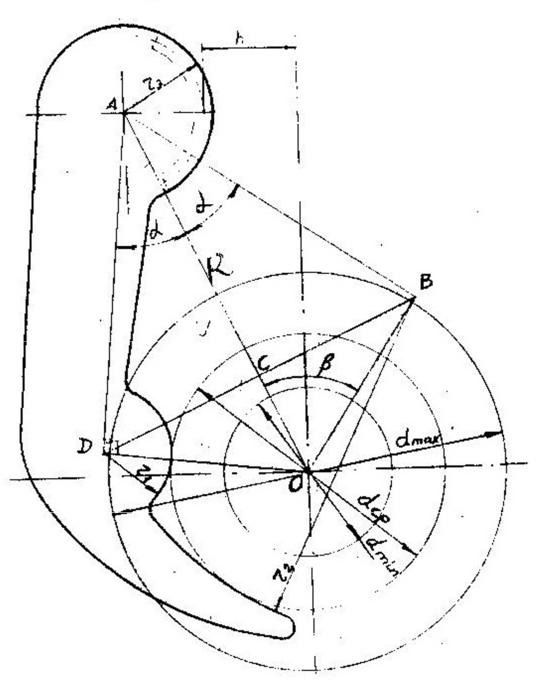
Построение профиля губок широкодиапазонных схватов
Исходные данные: dmax, dmin
Порядок построения: ОА = R dmax; СВ = СD; = 25...35 ; АВО =АСВ = АСD = 90 ; h 6...8 m r1 = R sin - rср; r2 = R sin + rср ;
r3 |
|
m z 2 |
|
|
||
|
|
|
|
|
||
|
2 |
|
dmax |
dmin 4 tg2 |
||
|
|
Погрешность центрирования: |
||||
|
|
|
4096R |
3 |
||
|
|
|
|
|
|
|