

Схваты промышленных роботов
.pdfЛИТЕРАТУРА
1.Детали и механизмы роботов. Основы расчета, конструирования и технологии производства. Киев. Вища школа, 1990.
2.Дулько О.А. В помощь оператору ГПС: Справочная книга. Л.: Лениз-
дат, 1991.
3.Козырев Ю.Г. Промышленные роботы. Справочник. М.: Машиностроение, 1986.
4.Кочергин А.И. Конструирование и расчет металлорежущих станков и
станочных комплексов. Минск: Вышэйшая школа, 1991.
5. Металлорежущие станки/ Под ред. Пуша В.Э. М.: Машиностроение,
1986.
6. Механика промышленных роботов. М.: Машиностроение, 1989. Т.
3.
7.Обработка металлов резанием: Справочник технолога. М.: Машиностроение, 1989.
8.Проектирование и разработка промышленных роботов. М.: Машиностроение, 1989.
9.Промышленные роботы в машиностроении. Альбом схем и чертежей/
Под ред. Соломенцева Ю.М. М.: Машиностроение, 1987.
10. Расчет и проектирование деталей машин. М.: Машиностроение,
1978.
11.Справочник технолога-машиностроителя/Под ред. А.Г. Косиловой. М.: Машиностроение, 1985. Т. 1.
12.Спыну Г.А. Промышленные роботы. Конструирование и применение.
Киев: Выща школа, 1991.
13.СТП 04-96. Стандарт предприятия. Курсовые и дипломные проекты.
Общие требования к оформлению. Челябинск, ЧГТУ, 1996.
14. Челпанов И.Б., Колпашников С.Н. Схваты промышленных роботов. Л.: Машиностроение, 1989.

Приложение 1
Типовые схемы механических схватов
=
∙
∙
= |
2 |
∙ |
( |
+ ) |
= |
∙ ∙ |
∙ |
2 |
∙ |
∙ ( |
+ ) |
= 2 ∙ ∙

Приложение 1 (окончание)
= 2 ∙ ∙
2 |
= |
|
|
|
∙ |
|
|
||
− |
|
− |
∙ |
|
|
−( |
− ∙ |
) |
|
= 4 ∙
= 4 ∙ ∙

Рис. 1. Конструкция переналаживаемого схвата для деталей типа валов [9]
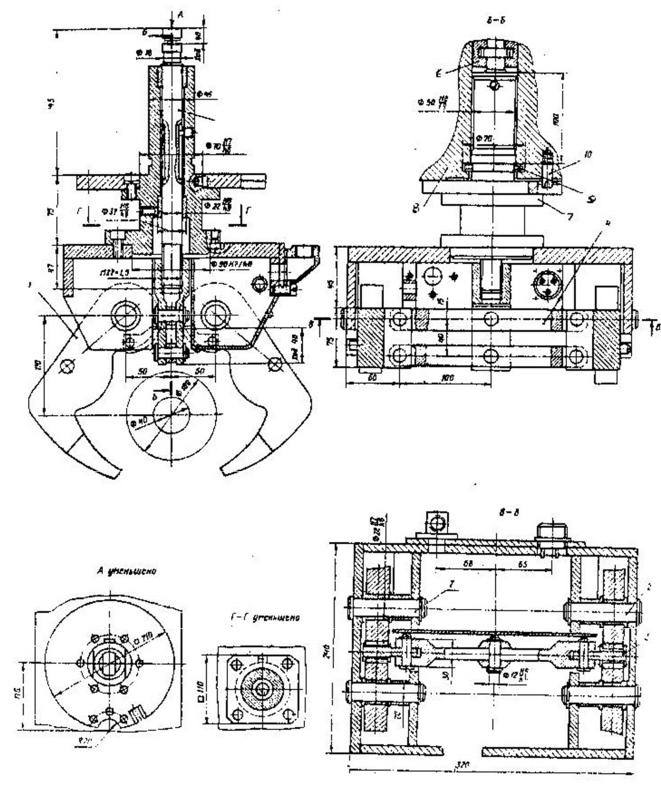
Рис. 2. Широкодиапазонный схват для тяжелых деталей типа валов [9]
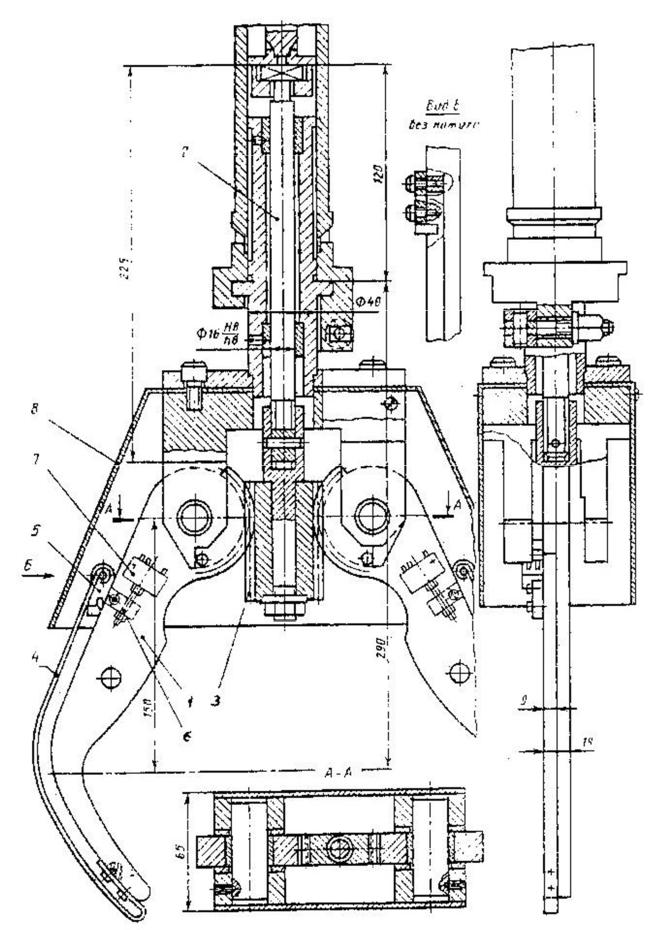
Рис. 3. Конструкция схвата для деталей типа дисков [9]
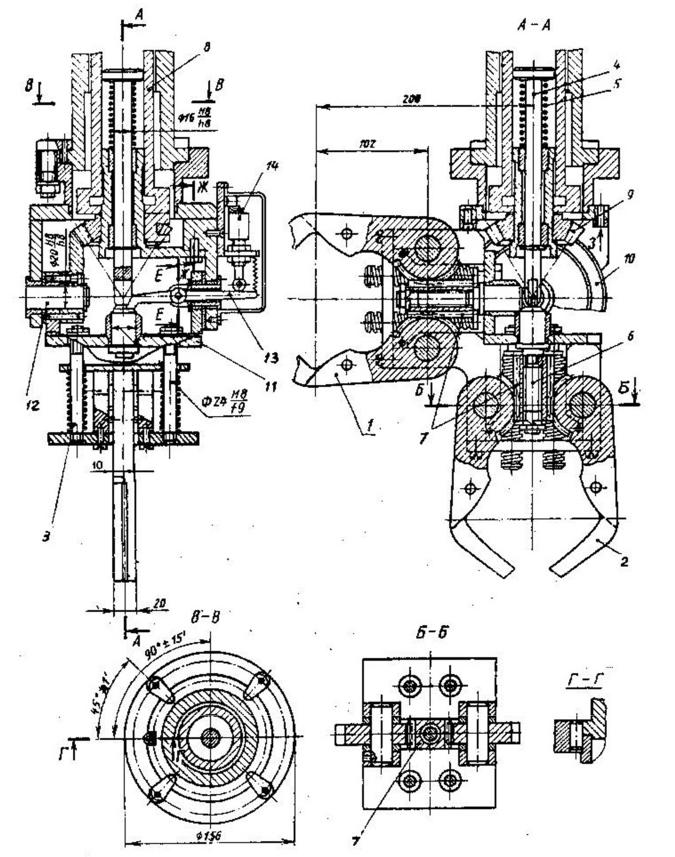
Рис. 4. Двухпозиционное захватное устройство [9]
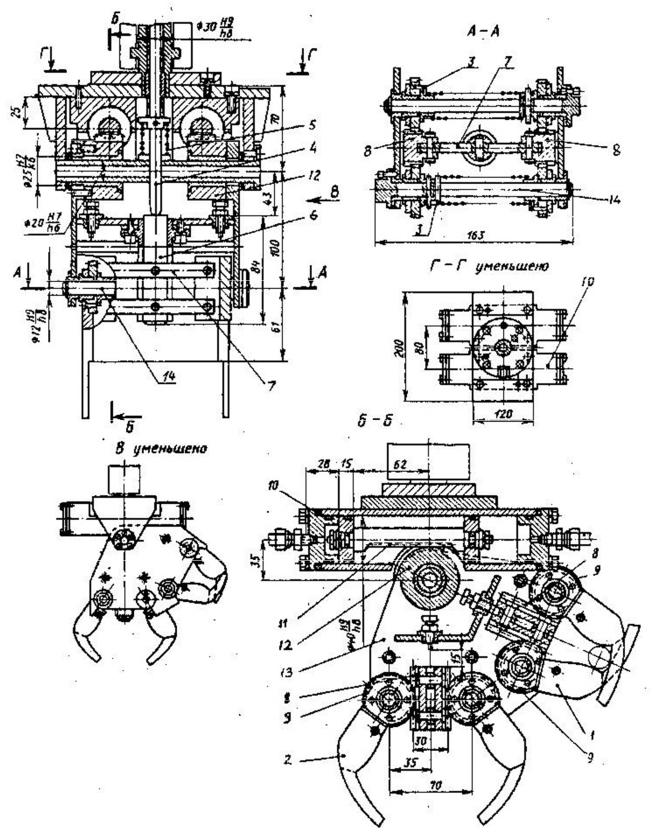
Рис. 5. Двухпозиционный широкодиапазонный схват [9]

Рис. 6. Механизм схвата с поворотными зажимными губками [9]

Рис. 7. Конструкция схвата ПР «Универсал-5» [14]
Рис. 8. Схват с гидроприводом для плоских деталей [14]