

Расчет текущего траверзного расстояния до ориентира
![]()
 Для решения задачи
нажмите кнопку, совместите курсор с
выбранным ориентиром (точкой) и щелкните
левой
клавишей мыши.
Ориентир будет отмечен специальным
маркером ┴, его координаты выводятся
в полях
и
,
а в верхней части окна начнут отображаться
текущие значения:
Для решения задачи
нажмите кнопку, совместите курсор с
выбранным ориентиром (точкой) и щелкните
левой
клавишей мыши.
Ориентир будет отмечен специальным
маркером ┴, его координаты выводятся
в полях
и
,
а в верхней части окна начнут отображаться
текущие значения:
траверзного расстояния до ориентира (поле Дистанция);
расчетного времени движения до точки траверза (поле T); время имеет отрицательное значение после прохода траверза;
расчетной дистанции до точки траверза (поле D).
Значения координат маркера также могут быть набраны (или откорректированы) в полях и .
Прокладка пути судна по данным рлс (для вер. 5.41 и выше, по заказу для вер. 4.41)
![]()
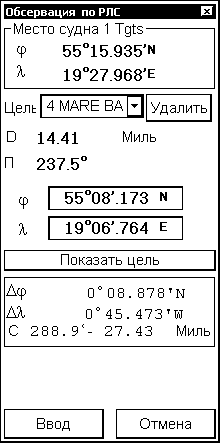 Функция предназначена
для непрерывного определения места
судна по неподвижным радиолокационным
ориентирам, сопровождаемым РЛС. При
нажатии кнопки курсор на карте принимает
вид
Функция предназначена
для непрерывного определения места
судна по неподвижным радиолокационным
ориентирам, сопровождаемым РЛС. При
нажатии кнопки курсор на карте принимает
вид
![]() .
.
Ориентир (ориентиры) первоначально должен быть взят на сопровождение РЛС (САПР), передающей информацию в dKart Navigator, после чего – обозначен на карте.
Данная функция работает только с NMEA-сообщениямиTTM(см. стр. 83).
Для решения задачи:
Откройте выпадающий список поля Цель и выберите его нижний элемент Добавить цель, появится дополнительное окно Цели от РЛС со списком всех сопровождаемых целей. Выберите в этом окне нужную цель – неподвижный ориентир. После этого номер (наименование), текущие пеленг и дистанция до ориентира и его географические координаты будут показаны в соответствующих полях. Первоначально программа определяет географические координаты ориентира по пеленгам и дистанциям, измеренным РЛС от текущего места судна. Для получения обсервованных координат ориентир должен быть точно обозначен на карте (привязан). До привязки координаты ориентира в окне отображаются красным цветом.
Если ориентир находится за пределами текущей области карты, нажмите кнопку Показать цель, чтобы увидеть ориентир в центре экрана:
 .
.Установите подвижный курсор в нужную точку на карте и щелкните левой клавишей мыши. Ориентир будет обозначен на карте символом
 .При
необходимости откорректируйте его
координаты
в полях
и
.
.При
необходимости откорректируйте его
координаты
в полях
и
.
После
привязки первого ориентира на карте
непрерывно показывается текущее
обсервованное место судна
 ,
а в окне - следующие параметры:
,
а в окне - следующие параметры:
общее число ориентиров, используемых в задаче (строка Место судна ... Tgs);
обсервованные координаты ( и );
поправки к координатам основной системы прокладки ( и );
направление и величина невязки ( и C).
Для увеличения точности задача может решаться одновременно по нескольким ориентирам. Вы можете добавлять и исключать ориентиры непосредственно в процессе решения задачи.
Для исключения ориентира выберите его из списка Цель и нажмите кнопку Удалить.
Прогноз положения судна
![]() Функция предназначена
для расчета координат и отображения на
карте места судна на заданное время
прогноза для текущих или заданных
параметров движения.
Функция предназначена
для расчета координат и отображения на
карте места судна на заданное время
прогноза для текущих или заданных
параметров движения.
Ч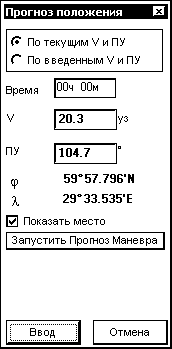 тобы
определить положение судна через
определенное время для текущих параметров
движения выберите вариантПо
текущим V и ПУ
и введите
время прогноза в поле Время,
в полях
и
будут
показаны прогнозируемые координаты
места судна.
Включите переключатель Показать
место, на
карте появится символ прогнозируемого
места судна:
тобы
определить положение судна через
определенное время для текущих параметров
движения выберите вариантПо
текущим V и ПУ
и введите
время прогноза в поле Время,
в полях
и
будут
показаны прогнозируемые координаты
места судна.
Включите переключатель Показать
место, на
карте появится символ прогнозируемого
места судна:
 .
.
Чтобы решить эту задачу для других параметров движения судна, выберите вариант По введенным V и ПУ и дополнительно введите значения путевого угла и скорости в поля V и ПУ.