

1.Уравнение движения электропривода
Движение электропривода определяется действием двух моментов: момента, развиваемого двигателем и момента сопротивления. Различают Реактивный Мс (появляется вследствие движения – противодействующая реакция механич-го звена на движение) и Активный(создается посторонними источниками механической энергии).
F=ma Fд-Fс=mdυ/dt-З Ньютона для поступ.дв
Mд-Mс=Jdω/dt – основное ур-е привода
J – момент инерции

1)Mд> Mс, Mдин>0 – разгон ЭП
2) Mд< Mс, Mдин<0 – торможение ЭП
3) Mд= Mс, Mдин=0 – установившееся движение
2. Механические характеристики производственных механизмов
Mс=f(ω) Аналитического расчета этих хар-к нет. С помощью эмпирической формулы
Mс=Мо+(Мсн-Мо)(ω/ωн)q
Можно рассчитать и приближенно построить хар-и для наиболее распр-ых произв-х механизмов.
Мо – момент статич.сопрот. при хол. ходе
Мсн – при номинальной скорости
ω – ω текущая, ωн – ω номинальная
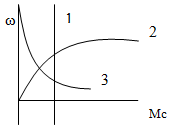
1)q=0, Mс=const
2) q=2, Mс=kω2≡ ω2
Вентиляторная хар-ка, компрессоры, ЦБН, грибной винт парохода
3) q=-2, Mс=1/(kω2)≡ 1/ω2
Такую хар-ку имеют металлорежущие станки вращ-го движения–токарные,фрезерные, расточ-е. Эта х-ка получается при постоянстве мощности.
Аналитическое выражение Mд=f(ω)
Рассмотрим хар-ки ЭД по степени их жесткости
К-т жесткости β=∆M/∆ω=∂M/∂ω

β=(M1-М2)/(ω1- ω2)=ctgα
Хар-ка || оси ох считается абсолютно жесткая. В ЭП наиболее желательной является наиболее жесткая хар-ка, обеспеч-я более стабильную скорость при различных колебаниях момента.
Хар-ка || оси оу – абсолютно мягкая хар-ка.

1)абсолютно жесткая.Такая х-ка у синхронного Д
2)жесткая-имеет ДПТНВ при питании обмотки якоря от источника напряжения
3)ав рабочий участок х-ки считается жестким.Это х-ка АД с короткозамкнутым ротором.
4)рабоч. участок ав считается мягкой х-ой. Такую х-ку имеет ДПТПВ
5)абсолютно мягкая хар-ка. Имеет ДПТНВ, но при питании обмотки якоря от источника тока большой мощности, момент двигателя Мд=Iя*kф, где k – обмоточный к-т, ф – поток.
3.Механические характеристики дптнв

Двигатель вращается, создается Евращ навстречу приложенному напряжению
1)Uя=IяRя+Евращ – уравнение равновесия
Евращ=kфω=сω, где k – обмоточный к-т, ф – поток.
k=(p*N)/(2πa), где p – число пар полюсов, N – число полюсов, a – число витков
Если в уравнение 1 Евращ выразим через сω и разрешим это уравнение отн-но ω
2) ω=(U-IR)/c=(U/c)-(IR/c) I=f(ω) – уравнение скоростной характеристики
Если в 2) I выразим через Мд=I*kф= Iс, то
3)
ω=(U/c)-(MR/c2)=
ωo+∆ω
M=
f(ω)
– ур-е механич. хар-ки двигателя
В ур-ии 2 и 3 переменные параметры находятся в 1 степени значит хар-ки будут линейными.Наклон хар-ки определяется R якоря, поэтому каждый конкретный двигатель с его Rя имеет единственную хар-ку, называемую естественной. Все остальные хар-ки при изменении парам-ов ур-ий 2 и 3 будут искусственными.
В ур-ях 2 и 3 1 член – скорость идеального х.х., 2 – просадка скорости.
Из анализа 2 и 3 следует, что:
1)при
введении добавочного Rд
в цепь якоря хар-ки будут мягче
естественной 
ω=(U/c)-(M(Rя+Rд)/c2)
2)при ослаблении потока ниже номинального хар-ки проходят выше естественной, сходясь в точке короткого замыкания (скоростные хар-ки) Точка опрокидования регулирования


3)при
уменьшении U
ниже Uном
хар-ки проходят ниже основной и // ей![]()
Основной хар-ка соответствует Uном
Тормозные режимы
1)Генераторный – осуществляется разгоном двигателя внешним источником вращения выше скорости ωo

U=IR+E Mд=CI E=Cω
2)торможение против включения
А)сменой полярности обмотки якоря и введением ограничивающего Rд. Ограничение необходимо во избежание возникновения кругового огня
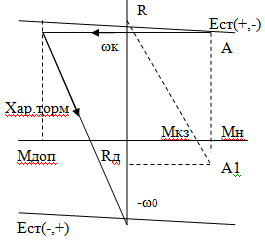
Б)введен Rд такой величины, когда выполняется Мкз<Мн (А1)
3) режим динамического торм-я осущ-ся откл.обмотки якоря от сети и замыканием ее на ограничивающее Rд. Обмотка возбуждения не откл. В этом случае тормозной М возникает за счет тока динамического торможения, протекающего под действием ЭДС вращения, сохраняю-щейся за счет вращения по инерции якоря.
