

Методуказание Плоское движение тв.тела
.pdfМинобрнауки РФ Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования «Восточно-Сибирский государственный университет технологий и управления»
(ФГБОУ ВСГУТУ)
Методические указания, справочный материал
к выполнению кинематического расчета плоского механизма для студентов технологических специальностей
Составители: Тришина В.Н. Галсанова Э.Ц. Батуева З.П.
Улан-Удэ Издательство ВСГУТУ
2013
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
2
Настоящая разработка содержит:
-требования к выполнению расчета,
-содержание работы,
-методические указания,
-справочный материал, необходимый для выполнения расчета,
Требования к выполнению расчета
-Работа выполняется на формате А4.
-Чертежи выполняются на миллиметровой бумаге формата А4.
Образец титульного листа:
Минобрнауки РФ Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования «Восточно-Сибирский государственный университет технологий и управления»
(ФГБОУ ВСГУТУ)
Кафедра «Механика и основы конструирования»
Кинематический расчет плоского механизма
Выполнил(а): ст.гр. _________
_____________
Проверил(а): ______________
Улан-Удэ
2013
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
3
Цель работы
Развитие навыков в самостоятельном решении задач.
Содержание работы
Дана схема плоского механизма, угловая скорость ведущего кривошипа, размеры
звеньев.
Определить:
Для заданного положения механизма
1.Скорости всех узлов механизма и угловые скорости всех звеньев механизма;
a.Графически способом полюса;
b.С помощью мгновенных центров скоростей.
2.Ускорения всех узлов и угловые ускорения всех звеньев графически способом полюса;
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

4
Краткая теория
§1. Определение кинематических характеристик звена, совершающего поступательное движение
Поступательным называется такое движение твердого тела, при котором любая прямая, проведенная в этом теле, перемещается, оставаясь параллельной своему первоначальному положению.
В плоском механизме поступательное движение совершают ползуны, а так называемое мгновенно-поступательное движение – некоторые другие звенья в определенные моменты времени.
При определении кинематических характеристик звена, совершающего поступательное движение, необходимо учитывать основное свойство этого движения: при поступательном движении все точки тела описывают одинаковые траектории и имеют в каждый момент времени одинаковые по модулю и направлению скорости и ускорения.
§2. Определение кинематических характеристик звена, совершающего
вращательное движение
Вращательным называется такое движение, при котором как минимум две точки,
принадлежащие телу (или неизменно с ним связанные), остаются во все время движения неподвижными.
В плоском механизме во вращательном движении находятся кривошипы (звенья,
которые могут совершать полный оборот вокруг неподвижной оси) и коромысла (звенья,
совершающие качания с некоторым углом размаха вокруг неподвижной оси). Ось вращения при этом проходит через закрепленные точки перпендикулярно плоскости механизма.
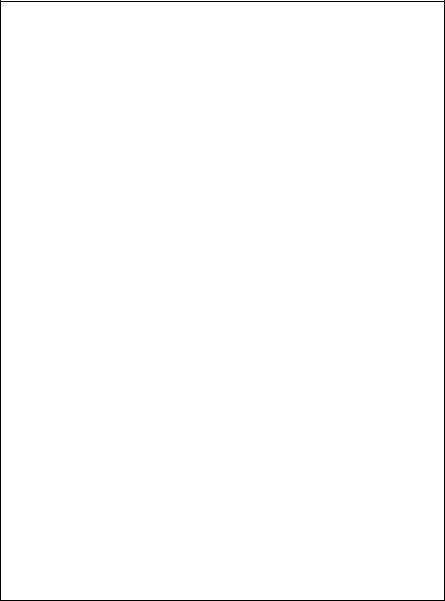
Основными кинематическими характеристиками вращательного движения твердого тела являются его угловая скорость ω и угловое ускорение ε, которые имеют в данный момент времени для всех точек тела одно и то же значение.
Линейная скорость точки есть векторная величина, модуль которой определяется по формуле
V R, |
(1) |
где V – скорость точки, R – радиус вращения.
Полное ускорение точки определяется как векторная сумма двух ускорений:
центростремительного и вращательного |
|
|||||
a |
|
a |
ц |
а |
вр. |
(2) |
Модуль центростремительного ускорения определяется по формуле |
|
|||||
aц 2 R. |
(3) |
|||||
Вектор центростремительного ускорения направлен по радиусу вращения и ориентирован к центру вращения.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
5 |
|
Модуль вращательного ускорения определяется по формуле |
|
aвр R. |
(4) |
Вектор вращательного ускорения направлен перпендикулярно радиусу вращения и ориентирован в сторону вращения, если оно ускоренное, и в противоположную сторону,
если оно замедленное.
V
|
авр |
авр |
aц |
V |
aц |
|
a |
a |
§3. Определение кинематических характеристик звена, совершающего плоское
движение
Плоское, то есть произвольное движение в плоскости механизма, совершают шатуны.
Плоское движение твердого тела слагается из поступательного движения, при котором все точки тела движутся так же, как полюс, и из вращательного движения вокруг этого полюса.
В качестве полюса можно выбирать любую точку тела.
Основными кинематическими характеристиками плоского движения являются скорость и ускорение полюса, а также угловая скорость и угловое ускорение вращательного движения вокруг полюса. Поэтому за полюс рекомендуется принимать точку, скорость и ускорение которой известны.
Угловая скорость и угловое ускорение тела от выбора полюса не зависят.
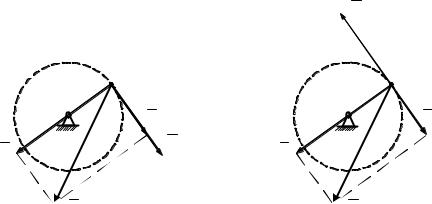
1. Определение скоростей точек и угловой скорости тела способом полюса.
Способ полюса для определения скоростей заключается в следующем: скорость любой точки тела можно определить как векторную сумму скорости полюса и скорости во вращении этой точки вокруг полюса.
Этим способом, так же, как и предыдущим, задачу можно решить аналитически и графически. Рассмотрим графическое решение задачи в случаях, описанных выше.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
|
|
6 |
|
а) |
|
Дано: VA,VB l |
|
VA |
|
Определить: VB |
|
|
|
||
A |
B |
Решение: |
|
Выберем в качестве полюса точку А. |
|||
l |
|
||
|
Тогда |
VB VA VBA, |
(5) |
где VBA - скорость точки В во вращении её вокруг А.
Выбрав масштаб и учитывая, что VB направлена по l, а VBA АВ(см. §2), построим треугольник изображающий равенство (1). Это треугольник oab. В нем ab VBA, ob VB .
Ориентацию VBA и VB определяем исходя из равенства (5).
|
a |
VBA ab , VB ob (Рисунок 1). |
|
l |
|
|
VA |
Используя формулу (1) §2, определим угловую скорость тела: |
|
b |
VBA . |
o |
AB |
BA |
|
||
|
|
Рис.1.
б)
Дано: VA,VB .
|
VA |
|
Определить: VC |
|
|
|
|
|
|
A |
|
B |
Решение: |
|
|
|
|
Выберем в качестве полюса точку А. Тогда |
|
|
C |
VB |
VC VA VCA. |
(6) |
|
|
|
Выберем в качестве полюса точку В. Тогда |
|
|
|
|
VC VB VCB , |
(7) |
|
|
AC |
VA VCA VB VCB. |
(8) |
o |
VA |
a |
|
|
|
|
Выбрав масштаб и учитывая, что |
VCA CA, а |
|
VC |
VB |
|
VCB CB(см. §2), построим четырехугольник |
oabc. В нем |
c |
|
ac VCA, oc VC , cb VCB. Ориентацию VCA, VCB и VC |
||
|
b |
BC |
||
|
определяем исходя из равенства (8) или равенств (6) и (7). |
|||
|
|
|||
|
Рис. 2 |
|
Угловая скорость тела: VCA VCB . |
|
|
|
|
CA CB |
|
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

7
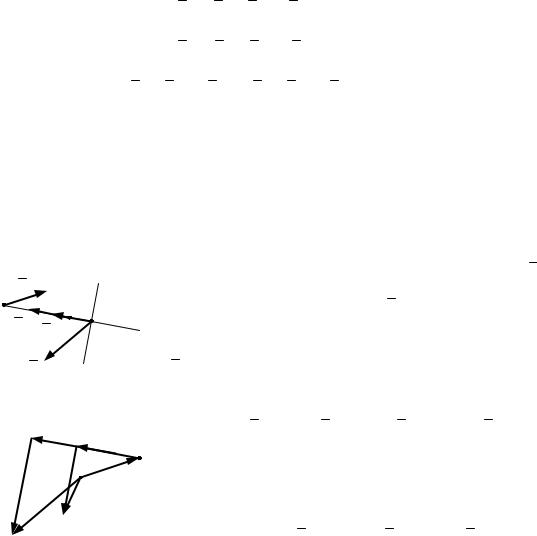
в)
|
|
|
AC |
|
|
|
|
|
VA |
|
Дано: VA ,VB, AB |
K |
|
|
|
|
|
|
|
Определить: VC |
|
|
|
|
|
|
A |
|
Решение: |
|
|
|
|
|
|
|
Выберем в качестве полюса точку А. Тогда |
|
||||||
C |
B |
|
||||||
|
|
VB |
|
|
|
|
|
(9) |
|
|
VB VA VBA, |
|
|
|
|||
|
|
VC VA VCA. |
|
|
|
(10) |
||
Так как ω для всех точек тела имеет одно и то же значение (см. §2), то VBA AB, |
|
|||||||
|
V |
AC , VCA |
AC K , V |
|
V |
BA |
(11) |
|
|
CA |
VBA |
AB |
CA |
|
|
||
a |
|
|
|
|
|
|
||
VA |
Для определения VBA выберем масштаб и, учитывая, что |
|
||||||
|
|
|||||||
o |
VBA BA, построим треугольник, изображающий равенство (9). |
|||||||
c |
Это треугольник oab, ab VBA. Учитывая равенство (11), найдем |
|||||||
b |
на рисунке 3 точку С такую, что |
ac VCA. Тогда в соответствии с |
||||||
|
равенством (10) oc VC . Рисунки 1, 2, 3 называются планами |
|
||||||
Рис.3 |
скоростей. |
|
|
|
|
|
|
|
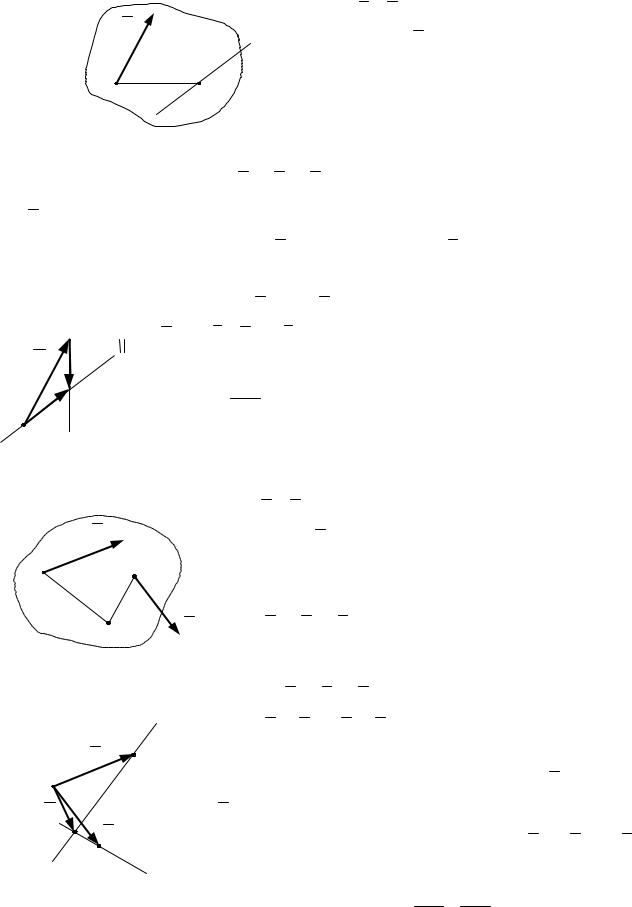
2.Определение скоростей точек и угловой скорости тела с помощью мгновенного центра скоростей.
Мгновенным центром скоростей (м.ц.с.) называется точка тела или неизменно связанная
сним точка, скорость которой в данный момент времени равна нулю.
Взависимости от условия задачи, можно воспользоваться разными способами отыскания
м.ц.с.
а)
Дано: VA, , направление вращения тела.
C
|
|
|
Умножим VAна величину 1 , полученный вектор AB |
|
|
VA |
|
|
|
A |
B |
повернем в сторону вращения тела на 90 . |
||
|
||||
|
|
Конец повёрнутого вектора, точка С – м.ц.с.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
8
б)
|
VA |
|
Дано: l1, l2 . |
||
A |
|
Решение. |
|
||
|
B |
|
|||
|
С – м.ц.с. |
|
|||
l1 |
|
VB |
|
||
|
|
AC l1 |
, |
BC l2 |
|
|
|
|
|||
|
C |
|
l2 |
|
|
|
|
|
|
|
|
в)
A |
VA |
|
Дано: VA VB . |
|
VB |
Решение. Перпендикуляры, проведенные из точек А и В |
|||
B |
||||
|
|
|
к их скоростям, не пересекаются. В этом случае м.ц.с. нет. |
|
|
|
|
Движение мгновенно-поступательное и скорости всех |
|
|
|
|
точек тела одинаковы по модулю и направлению (см. §1). |
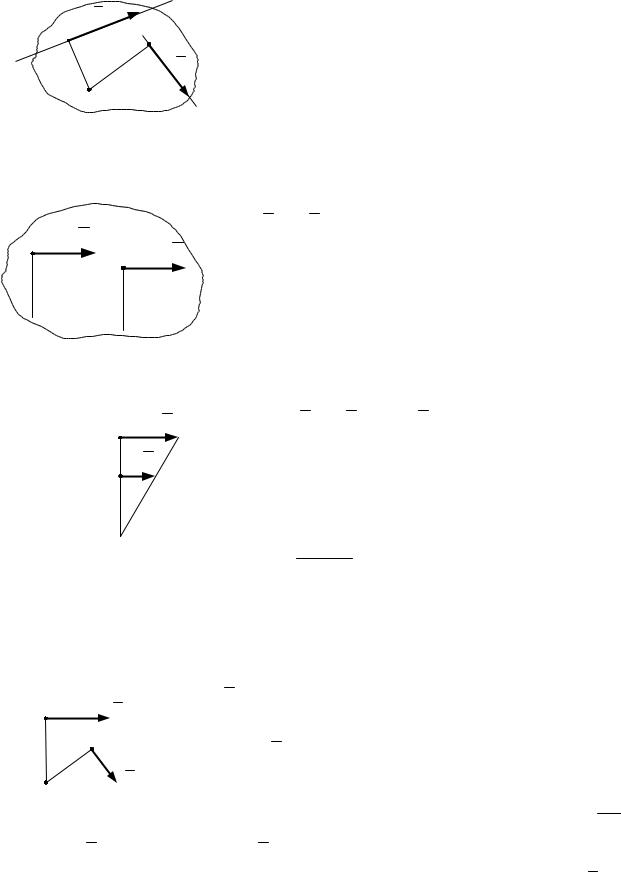
г)
VA |
A |
VB |
B |
Дано: VA VB , AB VA VA, VB, VA VB .
Решение.
С – м.ц.с.
VA |
|
AC |
; |
VA |
|
VB |
|
VA VB |
|
VA VB |
; |
|
|
|
|
|
|||||||
VB BC |
AC BC AC BC |
|
AB |
||||||||
AC AB VA .
VA VB
Если м.ц.с. известен, то скорости точек тела вычисляют так же, как и в случае вращения тела в рассматриваемый момент времени вокруг своего м.ц.с.
A |
VA |
Дано: VA, положение точки С (м.ц.с.), |
|
положение точки В. |
|||
|
|
||
|
B |
Определить: VB . |
|
|
Решение. |
||
C |
VB |
||
|
|
Используя выводы, сделанные в §2, получим: VA , |
|
|
|
AC |
VB BC , VB BC . Ориентацию VB определяем исходя из того, что тело вращается вокруг точки С по ходу часовой стрелки (об этом делаем вывод, исходя из ориентации VA).
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

9
3. Определение ускорений точек и углового ускорения тела способом полюса.
Способ полюса для определения ускорений заключается в следующем: ускорение любой точки тела можно определить как векторную сумму ускорения полюса и ускорения во вращении этой точки вокруг полюса.
Этим способом задачи можно решить аналитически и графически. Рассмотрим наиболее часто встречающиеся случаи.
а)
A |
|
a |
A |
|
у |
|
|
Дано: |
a |
A,a |
B l |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
ц |
|
|
|
|
Определить: |
a |
B , |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
aBA |
|
|
|
|
Решение. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Выберем в качестве полюса точку А. |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
aB |
|
B |
l |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
Тогда |
|
|
|
|
|
a |
B |
a |
A |
a |
BA, |
|
|
|
(12) |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
вр |
х |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
aBA |
|
где |
a |
BA – ускорение точки В во вращении ее вокруг А. |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
Используя формулу (2) §2, равенство (8) можно записать в следующем виде: |
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
B |
a |
A |
a |
BAц |
|
a |
BAвр . |
|
|
|
(13) |
||||||||||||||
|
В векторном уравнении (13) величина и направление ускорения точки А ( |
a |
A) |
||||||||||||||||||||||||||||||||||||||||
известны. Используя выводы, сделанные в §2, получим: aц |
2 АB, |
a |
ц |
направлено по |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BA |
|
|
BA |
|
|
|
линии l, |
|
|
|
a |
BAвр AB. |
При графическом решении задачи, |
выбрав |
масштаб, построим |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
c |
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
четырехугольник, изображающий равенство (13). |
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
l |
b |
|
|
|
|
|
|
|
|
a |
Это четырехугольник oacb. В нем cb aBAвр , оb aВ . |
|
|
|
|||||||||||||||||||||||||||||
AB |
|
|
|
o |
|
|
Ориентацию |
a |
BAвр и |
a |
В определяем исходя из равенства (13). |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BAвр , |
|
|
|
В . |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
сb |
a |
оb |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
Рис.4. |
|
|
|
Используя формулу (4) §2, определим угловое ускорение тела: |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
a |
вр |
||
|
|
|
|
|
|
|
BA |
. |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
BA |
||
б) |
Дано: |
a |
A,a |
|
АС |
||||
B , |
|
К |
|||||||
|
|||||||||
|
|
|
|
|
АВ |
|
|
||
Определить: aС
Решение.
Выбирая точку А в качестве полюса, получим:
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
10
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
В |
a |
А |
a |
ВцA |
a |
ВврA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(14) |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
С |
a |
А |
a |
CAц |
a |
CAвр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(15) |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
B |
a |
CцВ |
a |
CврВ |
a |
А |
a |
CAц |
|
a |
CAвр . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(16) |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
ц |
|
2 |
|
|
|
|
|
|
ц |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
аСАц |
|
|
|
|
|
АС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ц |
|
|
|
|
|
|
|
|
ц |
|
|
||||||||||||||
|
|
|
|
|
a |
|
АВ, |
a |
|
|
|
|
СА, |
|
|
К |
, |
|
|
|
а |
|
К а |
(17) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
BA |
|
CA |
|
|
|
|
аВАц |
|
|
|
|
|
|
СА |
ВА |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
АВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
вр |
|
|
|
|
|
|
вр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
аСАвр |
|
АС |
|
|
|
|
|
|
|
|
|
|
|
|
|
вр |
|
|
|
|
|
|
|
вр |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
a |
BA |
АВ, |
|
|
a |
CA |
|
СА, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К , |
|
|
|
|
|
|
а |
СА |
К а |
ВА |
(18) |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
аВАвр |
|
АВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
A |
|
a |
A |
|
|
|
|
|
|
|
у |
|
|
|
|
|
При графическом решении |
|
|
для |
|
|
определения |
a |
ВврA выберем |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
C |
B |
|
|
|
|
|
масштаб и учитывая, что |
a |
ВцA |
|
|
по величине определяется |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
a |
CAц |
|
|
a |
BAц |
|
х |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
формулой |
(16), |
|
направлено |
по |
|
ВА |
к центру |
вращения А, а |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
a |
B |
|
|
|
|
|
|
|
|
|
|
a |
ВврA АВ, построим четырехугольник, изображающий равенство |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
(14). Это четырехугольник оаdb. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A, |
|
|
|
|
|
|
B , |
|
|
|
|
|
BAц , |
|
|
|
|
|
BAвр . |
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
d |
|
|
|
|
|
e |
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
оа |
a |
|
оb |
a |
|
аd |
a |
|
|
db |
a |
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
o |
|
|
|
|
|
|
Учитывая |
равенства |
(17) |
|
и |
(18), |
построим четырехугольник, |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
изображающий равенство (15). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
Это четырехугольник оаec. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
САц , |
|
|
|
|
|
САвр , |
|
|
|
|
|
С . |
|
|
|||||||||||||||||||||||||||
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ае |
a |
ес |
a |
|
ос |
a |
|
|
|||||||||||||||||||||||||||||||||||||||||
Чертежи на рисунках 4 и 5 называют планами ускорений.
Рис.5.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)