

01 Кинематический расчет привода
.docСостав курсового проекта:

*Для машиностроительных специальностей
Литература:
-
по курсовому проектированию:
-
Дунаев П.Ф., Леликов О.П. Конструирование узлов и деталей машин. – М.: Высш. шк., 1985 – 416 с., (2001 – 447 с., 2003 – 496 с.)
-
Дунаев П.Ф., Леликов О.П. Детали машин. Курсовое проектирование. – М.: Машиностроение, 2004 – 560 с.
-
Шейнблит А.Е. Конструирование узлов и деталей машин. – М.: Высш. шк., 1985 – 416 с.
-
Курсовое проектирование деталей машин. Чернавский С.А., Ицкович Г.М., – М.: Машиностроение, 1979 – 454 с.
-
Чернилевский Д.В. Детали машин: проектирование приводов технологического оборудования. – М.: Машиностроение, 2001 – 560 с.
-
Анурьев В.И. Справочник конструктора-машиностроителя: В 3 т. – М.: Машиностроение, 2001.
-
Детали машин: Атлас конструкций. Под ред. Решетова Д.Н. – М.: Машиностроение, 1979.
-
общие вопросы:
-
Ряховский О.А. Детали машин. – М.: Дрофа, 2002 – 288 с.
-
Гузенков П.Г. Детали машин. – М.: Высшая школа, 1982 – 351 с.
-
Романов М.Я. и др. Сборник задач по деталям машин. – М.: Машиностроение, 1984 – 240 с.
Краткая теория:
Привод – устройство, приводящее в движение машину или механизм.
Редуктор – механизм передачи, выполненный в отдельном корпусе, и служащий для передачи вращательного движения с уменьшением угловой скорости вращения и увеличением вращающего момента.
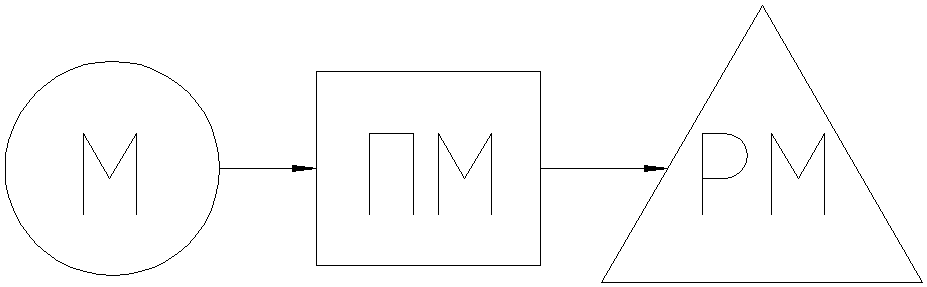
Рис. 1 Схема привода
М – источник движения (электродвигатель)
ПМ – передаточный механизм (редуктор)
РМ – рабочий механизм (ленточный или цепной конвейер)
Стрелками показано направление передачи вращательного движения.
Исходные данные для выполнения КП:
-
Кинематическая схема привода (рисунок);
-
Мощность на ведомом валу конвейера РВМ = Р3, кВт;
-
Угловая скорость вращения ведомого вала конвейера, ωВМ = ω3, рад/с;
-
Также могут быть заданы: срок службы привода, вид рабочей нагрузки – постоянная или переменная (задается графиком), коэффициенты суточного и годового использования КСУТ, КГОД.
Если заданы другие исходные данные, а именно:
-
для ленточного конвейера:
-
Окружное усилие Ft (кН) на барабане;
-
Окружная скорость V (м/с) барабана;
-
Диаметр барабана D (мм);
-
для цепного конвейера:
-
Окружное усилие Ft (кН) на тяговой звездочке;
-
Окружная скорость V (м/с) этой звездочки;
-
Шаг тяговых цепей t (мм);
-
Число зубьев звездочки Z,
то необходимо вычислить РВМ и ωВМ по формулам:
![]() ,
кВт
,
кВт
![]() ,
рад/с
,
рад/с
Диаметр звездочки вычисляется по формуле:
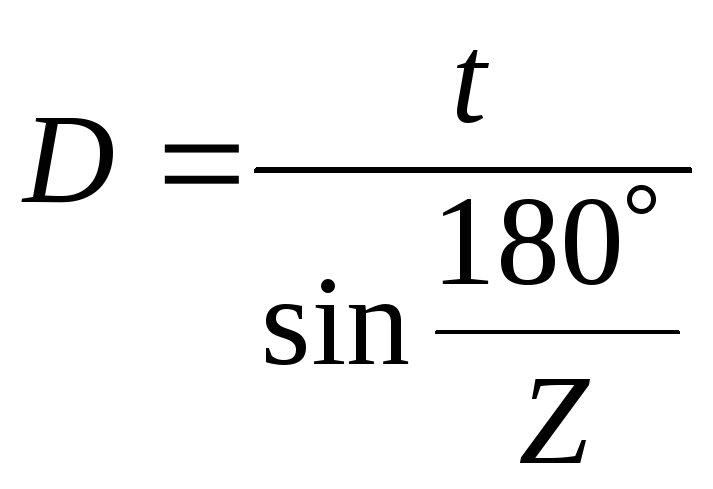 ,
мм
,
мм
Кинематический расчет привода:
-
Подбор электродвигателя:
Мощность на ведущем валу привода (на валу электродвигателя)
![]()
где – коэффициент полезного действия (КПД) привода. Он равен произведению КПД всех ступеней привода:
![]()
где n – число ступеней, т.е. механических передач, в приводе. Обычно этих передач две и привод двухступенчатый. Эти две ступени могут располагаться внутри редуктора, который в этом случае будет двухступенчатым. В другом случае редуктор одноступенчатый, тогда вторая передача (ременная или цепная) располагается снаружи.
КПД механической передачи определяется из таблицы 1:
табл. 1
|
Тип передачи |
КПД |
Передаточное число u |
|
|
Зубчатая цилиндрическая |
прямозубая |
0,97 |
2..4 |
|
косозубая |
2..5 |
||
|
Зубчатая коническая |
0,96 |
1..4 |
|
|
Червячная |
0,75 |
16..50 |
|
|
Ременная |
0,95 |
2..4 |
|
|
Цепная |
0,94 |
1,5..4 |
|
Затем ориентировочно определяется частота вращения ведущего вала
![]() ,
об/мин
,
об/мин
где
![]() ,
об/мин – частота вращения ведомого
вала,
,
об/мин – частота вращения ведомого
вала,
uOP – ориентировочное передаточное число привода. Оно равно произведению передаточных чисел всех ступеней привода:
![]()
Передаточное число отдельной механической передачи определяется из таблицы 1, где приведены рекомендуемые интервалы передаточных чисел для каждой передачи. Сначала берется среднее значение из интервала.
После определения РВЩ и nВЩ производится выбор электродвигателя из таблицы 2. При этом мощность электродвигателя должна быть не меньше мощности на ведущем валу:
![]()
и частота вращения вала электродвигателя должна приблизительно равняться ориентировочной частоте вращения ведущего вала:
![]()
Двигатели закрытые обдуваемые единой серии 4А
(тип/асинхронная частота вращения, об/мин)
|
табл. 2 |
||||
|
Мощность NЭ/Д, кВт |
Синхронная частота, об/мин |
|||
|
3000 |
1500 |
1000 |
750 |
|
|
0,25 |
– |
– |
– |
71В8/680 |
|
0,37 |
– |
– |
71А6/910 |
80А8/675 |
|
0,55 |
– |
71А4/1390 |
71В6/900 |
80В8/700 |
|
0,75 |
71А2/2480 |
71В4/1390 |
80А6/915 |
90LA8/700 |
|
1,1 |
71B2/2810 |
80A4/1420 |
80B6/920 |
90LB8/700 |
|
1,5 |
80A2/2850 |
80B4/1415 |
90L6/935 |
100L8/700 |
|
2,2 |
80B2/2850 |
90L4/1425 |
100L6/950 |
112MA8/700 |
|
3 |
90L2/2840 |
100S4/1435 |
112MA6/955 |
112MB8/700 |
|
4 |
100S2/2880 |
100L4/1430 |
112MB6/950 |
132S8/720 |
|
5,5 |
100L2/2880 |
112M4/1445 |
132S6/965 |
132M8/720 |
|
7,5 |
112M2/2900 |
132S4/1455 |
132M6/970 |
160S8/730 |
|
11 |
132M2/2900 |
132M4/1460 |
160S6/975 |
160M8/730 |
|
15 |
160S2/2940 |
160S4/1465 |
160M6/975 |
180M8/730 |
|
18,5 |
160M2/2940 |
160M4/1465 |
180M6/975 |
– |
|
22 |
180S2/2945 |
180S4/1470 |
– |
– |
|
30 |
180M2/2945 |
180M4/1470 |
– |
– |
-
Определение фактических передаточных чисел ступеней привода:
Сначала определяется фактическое общее передаточное число привода:
![]()
Затем полученное общее передаточное число разбивается по отдельным ступеням, т.е. uД представляется в виде произведения передаточных чисел всех ступеней.
Для двухступенчатого привода
![]()
где u1 и u2 не должны выходить за рекомендуемые интервалы (табл. 1).
-
Расчет частот вращения n (об/мин), угловых скоростей ω (рад/с) и вращающих моментов Т (Н∙м) для всех валов привода:
Число валов в приводе на 1 больше числа передач.
Например, если в приводе имеются три передачи, то число валов равно четырем. Рассчитаем для каждого вала такого привода величины n, ω и Т:
Первый вал:
|
|
|
|
Второй вал:
|
|
|
|
Третий вал:
|
|
|
|
Четвертый вал:
|
|
|
|
Поскольку все передачи в приводе являются понижающими, то скорость вращения каждого последующего вала должна уменьшаться, а вращающий момент на валу – увеличиваться:
n1 > n2 > n3 > n4
ω1 > ω2 > ω3 > ω4
T1 < T2 < T3 < T4
Пример кинематического расчета привода:
Задание: Произвести кинематический расчет привода цепного конвейера (рис. 2).
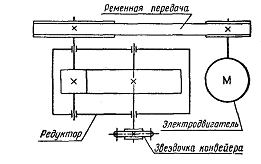
Рис. 2 Схема привода цепного конвейера
Окружное усилие на тяговой звездочке конвейера Ft = 2,5 кН, окружная скорость этой звездочки
V = 1 м/с, шаг тяговой цепи t = 80 мм, число зубьев звездочки Z = 13.
Решение: В приводе использованы две передачи: одна – ременная, другая – зубчатая цилиндрическая прямозубая, расположенная в редукторе.
Сначала вычисляется мощность и угловая скорость вращения для ведомого вала конвейера:
![]() кВт
кВт
![]() рад/с
рад/с
где диаметр звездочки
 мм.
мм.
Подбор электродвигателя:
Мощность на ведущем валу
![]() кВт.
кВт.
где = 1 ∙ 2 = 0,95 · 0,97 = 0,92 – общий КПД привода (1 = 0,95 – КПД ременной передачи,
2 = 0,97 – КПД зубчатой прямозубой передачи).
Частота вращения ведущего вала
![]() об/мин.
об/мин.
где
![]() об/мин – частота вращения ведомого вала
конвейера;
об/мин – частота вращения ведомого вала
конвейера;
uOP – ориентировочное передаточное число привода,
![]()
где u1 = 3 и u2 = 3 – средние значения передаточных чисел ременной и зубчатой цилиндрической передачи (табл. 1).
По табл. 2 подбираем электродвигатель 4А 112MB8/700 мощностью NЭ/Д = 3 кВт и номинальной частотой вращения вала nЭ/Д = 700 об/мин.
Действительные передаточные числа ступеней привода:
Действительное общее передаточное
число привода
![]()
Оставляем передаточное число ременной
передачи прежним u1 = 3,
тогда передаточное число зубчатой
цилиндрической передачи
![]()
Расчет частоты вращения, угловой скорости и вращающего момента для каждого вала привода:
Поскольку в приводе две передачи, то число валов равно трем.
Первый вал (вал электродвигателя):
![]() об/мин
об/мин
![]() рад/с
рад/с
![]() Н∙м
Н∙м
Второй вал (быстроходный вал редуктора):
![]() об/мин
об/мин
![]() рад/с
рад/с
![]() Н·м
Н·м
Третий вал (тихоходный вал редуктора):
![]() об/мин
об/мин
![]() рад/с
рад/с
![]() Н∙м
Н∙м
Результаты расчетов занесены в таблицу:
|
Валы |
ω, рад/с |
n, об/мин |
Т, Н∙м |
|
1 |
73,27 |
700 |
40,9 |
|
2 |
24,41 |
233,3 |
116,8 |
|
3 |
5,98 |
57,2 |
460,8 |
На каждом последующем валу скорость вращения меньше, чем на предыдущем, а вращающий момент больше.