

Измерение соответственных точек по методу наименьших квадратов
Идея
метода заключается в нахождении
продольного и поперечного параллаксов
путем минимизации разности между
плотностями фрагментов изображений
двух снимков под известным условием
 .
Другими словами находится такое положение
и форма матрицы поиска (фрагмента
изображения на втором снимке), при
котором разность плотностей этого
фрагмента с соответствующими плотностями
эталонной матрицы (фрагмента изображения
на первом снимке) будут минимальны.
.
Другими словами находится такое положение
и форма матрицы поиска (фрагмента
изображения на втором снимке), при
котором разность плотностей этого
фрагмента с соответствующими плотностями
эталонной матрицы (фрагмента изображения
на первом снимке) будут минимальны.
Для этого решается система уравнений вида:
 (
4.7)
(
4.7)
где

Здесь
 – функция
распределения плотностей D1
в пределах фрагмента изображения с
центром в измеряемой точке первого
снимка с координатами x1,y1;
– функция
распределения плотностей D1
в пределах фрагмента изображения с
центром в измеряемой точке первого
снимка с координатами x1,y1;
 – функция
распределения плотностей D2
в пределах фрагмента изображения с
центром в соответствующей точке второго
снимка с координатами x2,y2;
p
– продольный параллакс;
q – поперечный
параллакс;
– функция
распределения плотностей D2
в пределах фрагмента изображения с
центром в соответствующей точке второго
снимка с координатами x2,y2;
p
– продольный параллакс;
q – поперечный
параллакс;
Сначала предположим, что p и q не изменяются в пределах эталонной матрицы (фрагмента изображения вокруг измеряемой точки). Т.е. предположим, что имеем идеальную пару снимков равнинной местности (отсутствуют углы наклона и разность высот фотографирования). Тогда параллаксы можно найти из решения уравнений (4.7). Закон изменения плотностей изображений (функции f) в зависимости от координат точек снимков нам естественно неизвестен и он носит нелинейный характер. Однако нам известны дискретные значения этих функций (плотности) для пикселей с координатами xi yi. Это позволяет составить уравнения (4.7) для каждого пикселя фрагментов изображений. Поскольку уравнения (4.7) являются нелинейными относительно неизвестных, то переходят к линейным уравнениям поправок, которые можно записать в следующем виде:

или в общем виде
 , (
4.8)
, (
4.8)
где
A2
– матрица частных производных от правого
снимка по параллаксам;
 - поправки к неизвестным;L
– свободные члены (значения функции
(4.7) вычисленные по приближенным значениям
неизвестных); V
– невязки уравнений. То есть:
- поправки к неизвестным;L
– свободные члены (значения функции
(4.7) вычисленные по приближенным значениям
неизвестных); V
– невязки уравнений. То есть:
 ;
;  ;
; .
.
 ,
где n -
количество
пикселей в эталонной матрице; gx
, gy –
составляющие градиента второго
изображения в пикселе i.
,
где n -
количество
пикселей в эталонной матрице; gx
, gy –
составляющие градиента второго
изображения в пикселе i.
Алгоритмы вычисления градиентов от изображения будут рассмотрены в одном из следующих параграфов.
Решение находится как
 (
4.9)
(
4.9)
Далее на величины этих поправок уточняют неизвестные параллаксы и переходят к следующему приближению. Для реализации второй и последующих итераций формируют матрицу поиска на правом снимке с уточненными координатами пикселей:

Для
получения плотностей изображения
матрицы поиска обычно используют двойное
линейное интерполирование. На рис. 4.6
показано положение матрицы поиска на
правом снимке на нулевой итерации - и после i итерации -
и после i итерации - .
.
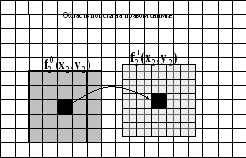
Рис. 4.6
Так
поступают до тех пор, пока поправки
 не станут пренебрегаемо малыми величинами.
В результате находят уравненные значения
параллаксов.
не станут пренебрегаемо малыми величинами.
В результате находят уравненные значения
параллаксов.
Проблемы автоматического стереоотождествления одноименных точек
При стереоскопическом рассматривании снимков у оператора не возникает проблем с отождествлением одноименных точек стереопары. Напротив, автоматические методы отождествления точек стереопары не всегда дают однозначно правильное решение.
Изложенные выше методы идентификации соответственных точек на стереопаре снимков предполагает, что фрагменты изображений, выбранные вокруг соответственных точек на снимках стереопары являются изображениями одного и того же участка снимаемого объекта. Однако это возможно только в том случае, когда стереопара снимков является идеальной ( угловые элементы внешнего ориентирования снимков равны нулю, а базис фотографирования параллелен оси Х системы координат объекта), участок снимаемого объекта представляет собой горизонтальную плоскость ( Рис. 4.7). В этом случае все пиксели на левом и правом снимках в пределах некоторой области (например, 5 х 5 пикселей) вокруг соответственных точек m1 и m2 являются изображениями одних и тех же точек местности.
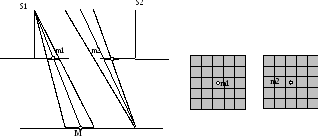
Рис.4.7
В реальных случаях оба снимка стереопары имеют, в общем случае, различные значения углов наклона и разворота снимков, базис фотографирования не параллелен оси Х системы координат объекта, а рельеф местности не является горизонтальной плоскостью (рис.4.8).

S2
S1

m2


M
m1







Рис. 4.8
В этом случае один и тот же участок местности (на рис.4.8 он выделен серым цветом) изображается по разному на паре снимков. Теперь если взять одинаковые фрагменты изображений (например, 5х5 пикселей) вокруг соответствующих точек m1 и m2 на первом и втором снимках, то увидим, что соответствующие пиксели будут отображать различные участки местности. Причем, чем дальше пиксель находится от центра фрагмента, тем больше расхождение. Учитывая то, что основой всех площадных методов отождествления одноименных точек пары снимков является, по сути, сравнение плотностей соответствующих пикселей в пределах фрагментов снимков, то очевидно разномасштабность, углы наклона и поворота снимков и рельеф местности снижают надежность автоматического отождествления соответствующих точек стереопары.
Кроме геометрических несоответствий изображений на паре снимков могут быть фотометрические различия этих снимков. Причинами фотометрических несоответствий пара снимков могут быть: различная отражательная способность поверхности; различное освещение; повторяемость поверхности объекта; большая величина шумов изображений.
На рис. 4.9 показаны два фрагмента изображений одного и того же участка местности, имеющих фотометрические искажения.


Рис. 4. 9
Существуют различные алгоритмы, позволяющие учесть как геометрические, так и фотометрические несоответствия двух и более снимков при автоматическом отождествлении одноименных точек. Так, например, корреляционный метод, рассмотренный выше позволяет учесть некоторые фотометрические искажения, путем вычисления нормализованного коэффициента корреляции. Геометрические искажения изображений можно учесть при отождествлении по методу корреляции, используя аффинные преобразования фрагментов изображений. Такой подход полностью повторяет отождествление по методу наименьших квадратов с учетом геометрических искажений изображений. Поэтому учет геометрических и фотометрических искажений будут рассмотрено ниже на примере метода наименьших квадратов, который позволяет наиболее полно учесть все виды искажений.