

Построение модели маршрута
Построение модели
маршрута производится путем
последовательного присоединения каждой
последующей модели к первой модели.
Этот процесс выполняется в два этапа.
Сначала определяют элементы внешнего
ориентирования присоединяемой модели
в системе координат модели маршрута
![]() .
.
i– номер присоединяемой модели (i= 2,3…n).
Д ля
определения элементов внешнего
ориентирования присоединяемой модели
для каждой связующей точки составляют
систему уравнений:
ля
определения элементов внешнего
ориентирования присоединяемой модели
для каждой связующей точки составляют
систему уравнений:
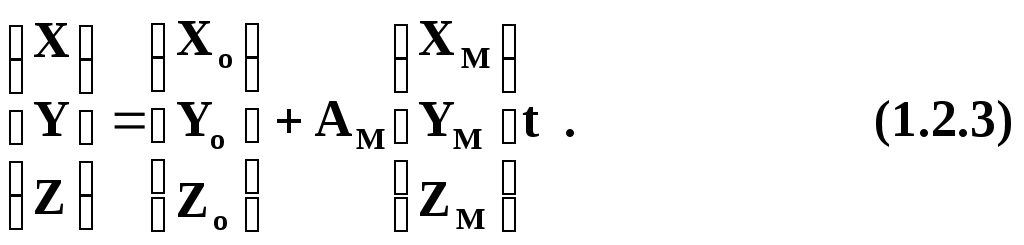
в которой Xм,Yм,Zм – координаты связующей точки в системе координат модели маршрута, аXмi,Yмi,Zмi– ее координаты в системе координат
i–ой модели.
Для определения элементов внешнего ориентирования модели необходимо не менее 3 связующих точек. В качестве связующей точки обязательно используется центр проекции Sобщего для двух соседних моделей снимка.
После определения элементов внешнего ориентирования модели определяют координаты точек присоединяемой модели в системе координат модели маршрута по формулам:
Необходимо отметить, что координаты связующих точек и общего для соседних
моделей центра проекции снимка Sв системе координат модели маршрута определяются дважды ( по двум соседним моделям ). Разности этих координат∆X,∆Y,∆Zявляются критерием точности построения модели маршрута и позволяют выявить грубые измерения.
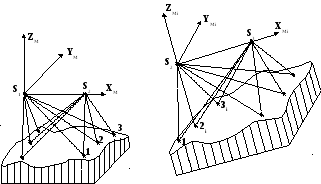
Рис. 1.2.3
В качестве окончательного значения координат точек модели маршрута берутся их средние значения из двух определений.
Рисунки 1.2.3 и 1.2.4 иллюстрируют процесс построения модели маршрута .
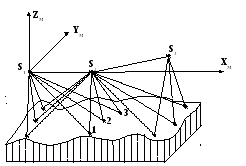
Рис. 1.2.4
Внешнее ориентирование модели маршрута
Внешнее ориентирование модели маршрута производится по опорным точкам в два этапа.
Сначала определяют
элементы внешнего ориентирования модели
маршрута
![]() в системе координат объектаOXYZ.
Этот процесс полностью аналогичен
процессу внешнего ориентирования
фотограмметрической модели, построенной
по стереопаре снимков.
в системе координат объектаOXYZ.
Этот процесс полностью аналогичен
процессу внешнего ориентирования
фотограмметрической модели, построенной
по стереопаре снимков.
 После
определения элементов внешнего
ориентирования модели маршрута вычисляют
координаты точек модели маршрута в
системе координат объекта:
После
определения элементов внешнего
ориентирования модели маршрута вычисляют
координаты точек модели маршрута в
системе координат объекта:
Устранение систематических искажений маршрутной сети по опорным точкам
Вследствие неполного учета систематических ошибок снимка, вызываемых дисторсией объектива, атмосферной рефракцией и другими причинами, координаты точек сети, определенные по формулам (1.2.3) могут содержать систематические ошибки.
Систематические искажения сети маршрутной фототриангуляции можно описать с помощью полиномов, например полиномов 2-го порядка:
в которых:
которых:
Ai, Bi, Ci– коэффициенты полиномов,
X, Y, Z– координаты точек сети, определенные в результате внешнего ориентирования модели маршрута,
Xи,Yи,Zи– координаты точек сети, исправленные за влияние систематических ошибок координаты точек сети.
Для определения коэффициентов полиномов необходимо не менее чем 5 планово-высотных опорных точек, расположенных по схеме, представленной на рис. 1.2.5,
так как каждая опорная точка позволяет составить 3 линейных уравнения с 15 неизвестными коэффициентами полиномов Ai, Bi, Ci:

В уравнениях (1.2.4.2)Xи,Yи,Zи– геодезические координаты опорной
точки в системе координат объекта.
уравнениях (1.2.4.2)Xи,Yи,Zи– геодезические координаты опорной
точки в системе координат объекта.
O
Рис.1.2.5
В результате решения полученной системы уравнений (1.2.5) находят значения коэффициентов полиномов Ai,Bi,Ci.Если опорных точек больше 5, то решение производят по методу наименьших квадратов.
По координатам точек сети X,Y,Zи значениям коэффициентовAi,Bi,Ciнаходят по формулам (1.2.4), исправленные за систематические искажения координаты точек сетиXи,Yи,Zи.
Следует отметить, что в случае если направление оси Xмсистемы координат модели маршрута не совпадает с осьюX системы координат объекта (рис. 1.2.6), перед выполнением процесса исключения систематических ошибок необходимо предварительно перевычислить координатыX, Y, Zопорных и определенных точек сети из системы координат объекта во вспомогательную систему координат объектаOX*Y*Z*,ось X*которой параллельна оси Xмсистемы координат модели в системе координат объекта (рис 1.2.6).

Рис. 1.2.6
Эти вычисления производят по формулам :

Затем производят устранение систематических искажений координат точек сети по методике описанной ранее в этом разделе, и перевычисляют
исправленные значения координат точек сети X*и, Y*и, Z*и, в систему координат объекта по формулам:
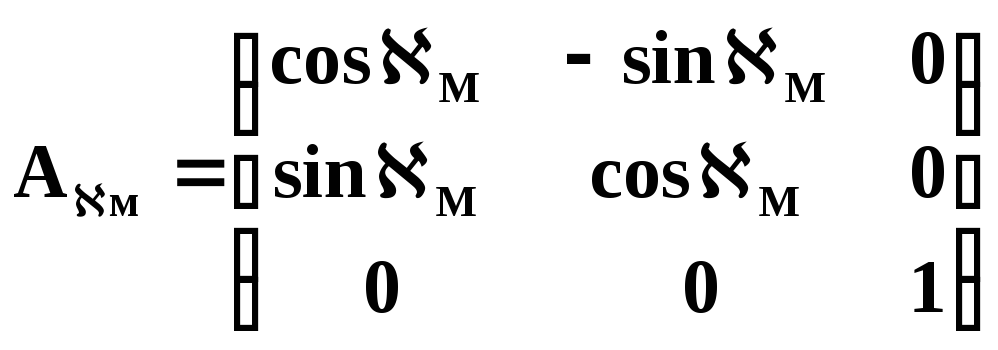
 В формулах
(1.2.6) и (1.2.7) матрицы преобразования
координат
В формулах
(1.2.6) и (1.2.7) матрицы преобразования
координат
![]() и
и![]() имеют вид:
имеют вид:
 и
и

в которых:![]() - угол разворота системы координат
модели.
- угол разворота системы координат
модели.