

6.4. Характеристики колебательных процессов
6.4.1. Число степеней свободы
Число независимых координат, определяющих положение системы в пространстве при колебаниях, называется числом степеней свободы.
На рис.6.3 показаны две системы с одной степенью свободы: одна совершает продольные колебания (рис.6.3,а), другая – поперечные (рис.6.3,б). К такой расчётной схеме можно свести задачу, если масса упругой системы мала по сравнению с массой колеблющегося груза (пружина и балка – упругие, невесомые).
а б
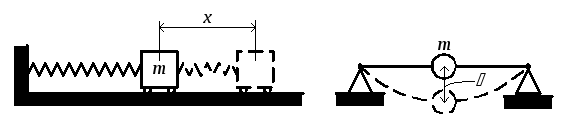
Рис.6.3
На рис.6.4 показаны системы с двумя степенями свободы. При рассмотрении поперечных колебаний наглядно видно, что возможны две формы колебаний (рис.6.4,б).
а б
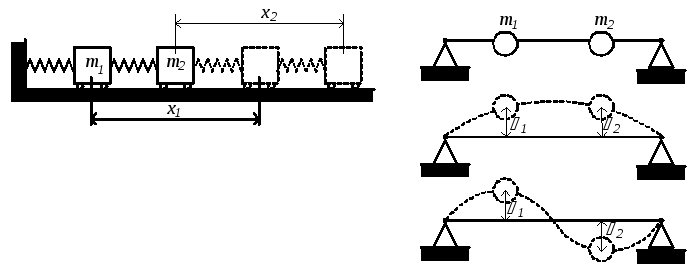
Рис.6.4
Ясно, что, увеличивая число сосредоточенных масс, и, соответственно, число степеней свободы, мы в пределе придём к системе с распределённой массой (рис.6.5), имеющей бесконечное число степеней свободы.
а б

Рис.6.5
6.4.2. Типы сил
Если отклонить от положения равновесия тележку, изображённую на рис.6.3,а, то в результате упругой деформации пружины возникнет сила упругости F = cx, стремящаяся вернуть тележку в положение равновесия (рис.6.6,а). Как только мы перестанем удерживать тележку, за счёт силыFона покатится обратно, пройдёт положение равновесия, сожмёт пружину и снова пойдёт вправо – начнётся колебательный процесс. Таким образом, при колебаниях сила упругости присутствует всегда так же, как и сила инерции.
Колебательный процесс в деталях машин и конструкциях происходит от действия внешней возмущающей силы P(t) (рис.6.6,б). Чаще всего эта сила бывает периодической, но может быть и непериодической.
В любом колебательном
процессе кроме упомянутых выше сил
действуют ещё и силы сопротивления. В
основном это силы внутреннего неупругого
сопротивления, зависящие от свойств
материала упругого тела (пружины или
балки). Очень часто для гашения колебаний
используют специальное устройство –
амортизатор. Эффект сопротивления
наилучшим образом учитывается введением
внешней силы, пропорциональной скорости
движения сосредоточенной массы
![]() (рис.6.6,в).
(рис.6.6,в).
а б в

F = cx–сила упругостиP = P(t)–возмущающаяся
![]() –
сила
–
сила
силасопротивления
Рис.6.6
6.4.3. Классификация колебаний
Колебательные процессы удобно классифицировать по признаку учёта (или не учёта) действующих сил:
свободные незатухающие колебания (F ≠ 0, I ≠ 0, P = 0, R = 0);
свободные затухающие колебания (F ≠ 0, I ≠ 0, P = 0, R ≠ 0);
вынужденные незатухающие колебания (F ≠ 0, I ≠ 0, P ≠ 0, R = 0);
вынужденные затухающие колебания (F ≠ 0, I ≠ 0, P ≠ 0, R ≠ 0).
Полезна также классификация по деформации, испытываемой деталью:
продольные (рис.6.3,а и 6.7,а);
поперечные или изгибные (рис.6.3,б и 6.7,б);
крутильные (рис.6.7,в).
а б в
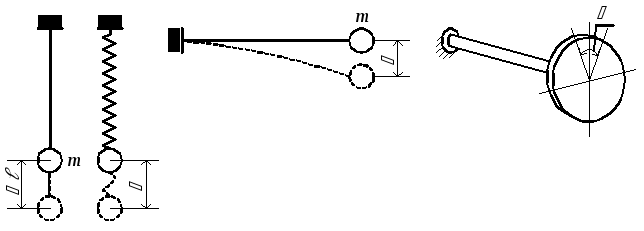
Рис.6.7