

3. ТРЕХФАЗНЫЕ ЭЛЕКТРИЧЕСКИЕ ЦЕПИ ПЕРЕМЕННОГО ТОКА
3.1.Основные понятия трехфазной цепи
Внастоящее время широкое распространение получили трехфазные цепи, что объясняется следующими причинами:
–при одинаковых напряжениях, мощностях потребителей питание от трехфазной сети позволяет получить значительную экономию материала проводов по сравнению с тремя однофазными линиями;
–трехфазный генератор дешевле, легче и экономичнее, чем три однофазных генератора такой же общей мощности;
–трехфазная система токов позволяет получить вращающееся магнитное поле, которое заложено в принципе действия асинхронных двигателей.
Трехфазной цепью называется совокупность трех цепей, в которых ЭДС источников энергии имеют одинаковую частоту, но сдвинуты между собой по фазе на 120º.
Трехфазная система электрических цепей представляет собой совокупность электрических цепей, в которых действуют три синусоидальные ЭДС одной и той же частоты, сдвинутые относительно друг друга по фазе и создаваемые общим источником питания.
Система трех ЭДС, равных по величине и сдвинутых по фазе на 120º по отношению друг к другу, называется симметричной.
Часть трехфазной электрической цепи, в которой протекает один из токов трехфазной системы, называется фазой. Фазой являются обмотка генератора, в которой индуцируется ЭДС, и приемник, подключенный к этой обмотке.
Таким образом, однофазная цепь, входящая в состав трехфазной цепи, называется фазой.
3.2.Получение трехфазной системы ЭДС
Трехфазная система ЭДС создается трехфазными генераторами. В неподвижной части генератора (статоре) размещают три обмотки, сдвинутые в пространстве на 120º. Это фазные обмотки, или фазы, начала которых обозначают буквами А, B, С; концы обмоток обозначают буквами X, Y, Z. На вращающейся части генератора (роторе) располагают обмотку возбуждения, которая питается от источника
68

постоянного тока. Ток обмотки возбуждения создает магнитный поток Ф0, постоянный (неподвижный) относительно ротора, но вращающийся вместе с ротором с частотой n. При вращении ротора вращающийся вместе с ним магнитный поток пересекает проводники обмоток статора (А–Х, В–Y, C–Z) и индуцирует в них синусоидальные ЭДС (рис. 3.1). Мгновенные значения этих ЭДС:
еA = Em sin ωt; |
|
|
|||
еB = Em sin(ωt −120°); |
(3.1) |
||||
е |
= E |
m |
sin(ωt |
−240°), |
|
C |
|
|
|
|
|
где Em – амплитудное значение ЭДС каждой фазы.
е
еА еВ еС
|
EC |
t |
EA |
0 |
|
EB
1 |
Т |
1 |
Т |
1 |
Т |
3 |
3 |
3 |
Рис. 3.1. График мгновенных значений и векторная диаграмма трехфазной системы ЭДС
Трехфазный генератор, соединенный проводами с трехфазным потребителем, образует трехфазную цепь. В трехфазной цепи протекает трехфазная система токов, т.е. синусоидальные токи с тремя различными фазами.
В трехфазных цепях различают прямую и обратную последовательности фаз подводимого к нагрузке напряжения. При прямой последовательности фаз (рис. 3.2) напряжение каждой последующей фазы отстает от напряжения предыдущей на угол 120º:
69
uA =U msinωt; |
|
|
uB =U msin(ωt −120°); |
(3.2) |
|
uC =U msin(ωt −240°), |
|
|
где Um – амплитудное значение напряжения каждой фазы.
UA
IA
IC
UC IB UB
Рис. 3.2. Векторная диаграмма трехфазных напряжений и токов при прямой последовательности фаз питающего напряжения и активно-индуктивной нагрузке
UA
IA
|
IВ |
|
UВ |
IС |
UС |
Рис. 3.3. Векторная диаграмма трехфазных напряжений и токов при обратной последовательности фаз питающего напряжения и активно-индуктивной нагрузке
70

При обратной последовательности фаз (рис. 3.3) напряжение каждой последующей фазы опережает напряжение предыдущей на угол
120º:
uA =Umsinωt; |
|
|
uB =Umsin(ωt +120°); |
(3.3) |
|
uC =Umsin(ωt +240°). |
|
|
От последовательности фаз системы напряжений зависит, например, направление вращения ротора асинхронного двигателя.
Отдельные фазы трехфазной цепи принято обозначать буквами A, B, C, а шины на станциях и подстанциях окрашивать соответственно: А – в желтый, В – в зеленый, С – в красный цвет.
Возможны различные способы соединения обмотки генератора с нагрузкой.
3.3. Схема соединения «звездой» в трехфазных цепях
Несвязанная трехфазная цепь, в которой каждая обмотка генератора питает свою фазную нагрузку (рис. 3.4), требует шесть соединительных проводов. Такая схема практически не применяется.
A |
|
iA (IA) |
|
|
|
|
|
|
|
еA |
|
|
UA |
ZA |
|
|
|
||
X |
|
|
|
|
Z |
Y |
|
UC |
UB |
|
|
|||
|
|
|
||
|
|
|
ZB |
|
еC |
еB |
B |
ZC |
C 
 iB (IB) iC (IC)
iB (IB) iC (IC)
Рис. 3.4. Несвязанная трехфазная цепь
На практике используют связанные трехфазные цепи, при этом число соединительных проводов от генератора к нагрузке уменьшается до трех или четырех.
71

На электрических схемах трехфазный генератор принято изображать в виде трех обмоток, расположенных под углом 120º друг к другу.
При соединении фаз трехфазного генератора или приемника электрической энергии «звездой» (рис. 3.5) концы фаз источника или приемника Х, Y, Z объединены в общую точку N, которая называется нейтральной или нулевой точкой, а начала фаз подключаются к соответствующим линейным проводам.
|
|
|
Генератор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Приемник |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
(IA) iA |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
UCA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ZA |
|
|
|
|
|
|
|
|
|
|||||
|
|
еA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
UA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
UAB |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iN=iA+iB+iC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
(X,Y,Z) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
UB |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
UAB |
|
|
|
UC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ZB |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
еB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ZC |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
еC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
(IB) iB |
|
|
|
|
|
|
|
|
B |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
UBC |
(IC) iC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
Источник ЭДС |
|
|
|
Линия |
|
|
|
|
|
|
|
|
Нагрузка |
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.5. Трехфазная схема при соединении обмоток генератора и приемника по схеме «звезда»
Провода, соединяющие начало фаз генератора и приемника электрической энергии, называются линейными проводами, а провод, соединяющий концы фаз генератора и приемника электрической энер-
гии, называется нейтральным, или нулевым.
В связанных трехфазных цепях различают фазные и линейные напряжения и токи. Фазным называется напряжение между началом и концом фазы генератора или приемника. Фазные напряжения обозначаются прописными буквами с одним буквенным индексом: UΑ,
UΒ , UC . Линейным называется напряжение между началами фаз генератора (или приемника) или напряжение между линейными прово-
72

дами. Линейные напряжения обозначаются прописными буквами с двойным буквенным индексом: U ΑΒ , U BC , UCΑ .
Каждое линейное напряжение при соединении обмоток генератора «звездой» определяется векторной разностью двух составляющих фазных напряжений.
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
AB =U A −U B ; |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
C ; |
(3.4) |
|
U BC =U |
B −U |
|||||||||||
|
|
|
|
|
|
A . |
|
|||||
UCA =UC −U |
|
|||||||||||
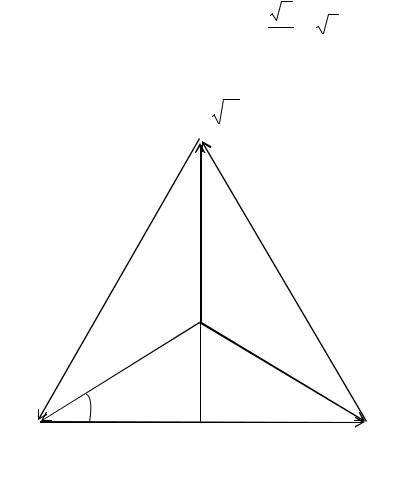
Векторную диаграмму, удовлетворяющую уравнениям (3.4), можно начинать строить с изображения векторов фазных напряжений, выходящих из одной точки под углом 120º друг к другу (рис. 3.6).
-UВ
UАВ |
|
|
|
UА |
|
IA |
|
φ |
|
|
|
IС |
|
|
UВС |
|
|
|
|
φ |
φ |
|
-UС |
UС |
|
||
|
UВ |
||
|
|
IВ |
|
|
|
|
|
-UА UСА
Рис. 3.6. Векторная диаграмма трехфазной цепи при соединении симметричной активно-индуктивной нагрузки «звездой». Векторы линейных и фазных напряжений выходят из одной точки
Вектор U AB определится как сумма векторов U Α и UΒ, вектор UΒC – как сумма векторов UΒ и UC , и вектор UCA – как сумма векторов UC и U Α.
73
Для полноты картины на векторной диаграмме изображаются также векторы токов, отстающих на угол φ от векторов соответствующих напряжений (нагрузка считается симметричной активноиндуктивной). Уравнениям (3.4), связывающим векторы фазных и линейных напряжений, удовлетворяет также топографическая векторная диаграмма, изображенная на рис. 3.7. На топографической векторной диаграмме порядок расположения векторов напряжений соответствует порядку расположения элементов в схеме, а вектор падения напряжения на каждом последующем элементе примыкает к концу вектора напряжения на каждом предыдущем элементе. Вектор, соединяющий концы двух векторов фазных напряжений, исходящих из одной точки, является их разностью. Векторы линейных напряжений образуют равносторонний треугольник. Из векторной диаграммы
UΒC = 2UС cos 30° = 2UC |
3 |
= 3UC . |
(3.5) |
|
2 |
|
|
Следовательно, между линейным и фазным напряжениями в схеме «звезда» существует зависимость
U Л = 3 UФ . |
(3.6) |
UAB
UA
UCA
UC |
UB |
|
|
30º |
UBC |
Рис. 3.7. Топографическая векторная диаграмма трехфазной цепи при соединении нагрузки «звездой»
Соотношение (3.6) выполняется:
–при наличии нейтрального провода при симметричной и несимметричной нагрузках;
–при отсутствии нейтрального провода только при симметричной нагрузке.
74
Ток, протекающий по линейному проводу, называется линейным током IЛ. Ток, протекающий между началом и концом фазы, называ-
ется фазным током IФ. При соединении «звездой» |
|
||||||||||||||||
|
|
|
|
I Л = IΦ . |
|
|
|
(3.7) |
|||||||||
Ток в нейтральном проводе в соответствии с первым законом |
|||||||||||||||||
Кирхгофа определится суммой мгновенных значений токов фаз: |
|
||||||||||||||||
|
|
iN = iА +iΒ +iC . |
|
|
|
(3.8) |
|||||||||||
Для действующих значений рассматривается векторная сумма |
|||||||||||||||||
фазных токов: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.9) |
||
|
I |
N = I Α + IΒ + IC . |
|
|
|
||||||||||||
Токи в фазах определяются по закону Ома: |
|
||||||||||||||||
I Α = |
U Α |
; I Β |
= |
U Β |
; IC |
= |
UC |
. |
(3.10) |
||||||||
|
|||||||||||||||||
|
|
|
|||||||||||||||
|
Z Α |
|
Z Β |
|
ZС |
|
|||||||||||
При симметричной нагрузке |
|
|
|
|
|
|
|
|
|
|
|
||||||
I Α = I Β = IC ; ϕΑ =ϕΒ =ϕC , |
(3.11) |
||||||||||||||||
где ϕΑ , ϕΒ , ϕC – углы сдвига по фазе между фазными напряжениями
ифазными токами.
Всоответствии с первым законом Кирхгофа для точки N
|
|
|
|
|
|
|
|
|
(3.12) |
I |
N = I Α + I Β + IC = 0 . |
||||||||
Следовательно, при симметричной нагрузке (см. рис. 3.6) ток нейтрального провода как векторная сумма фазных токов равен нулю (сумма трех векторов одинаковой длины, выходящих из одной точки под углом 120º друг к другу).
Нейтральный провод в этом случае не нужен, и схема из четырехпроводной превращается в трехпроводную.
При несимметричной нагрузке обрыв нейтрального провода вызывает значительное изменение фазных токов, а следовательно, и фазных напряжений, что в большинстве случаев недопустимо. Потребители, рассчитанные на фазное напряжение, при уменьшении фазного напряжения будут работать не в номинальном режиме, при увеличении фазного напряжения могут выйти из строя. Поэтому в цепь нейтрального провода предохранители и устройства защиты не устанавливаются.
Таким образом, при несимметричной нагрузке наличие нейтрального провода обязательно.
75
3.4. Схема соединения «треугольником» в трехфазных цепях
При соединении обмоток генератора «треугольником» (рис. 3.8) конец обмотки фазы А (Х) соединяется с началом обмотки фазы В, конец обмотки фазы В (Y) соединяется с началом обмотки фазы С, конец обмотки фазы С (Z) соединяется с началом обмотки фазы А. К точкам соединения подключаются линейные провода. При соединении «треугольником» трехфазная цепь трехпроводная. В этой цепи
линейное напряжение равно фазному. |
|
U Л =UΦ . |
(3.13) |
iA (IA)
A  Z
Z
 еСА еАВ
еСА еАВ 
 A
A
iAB (IAB)
iCA (ICA)
ZCA ZAB
еВС |
X |
|
ZBC |
Y |
C |
B |
|
C |
B iB (IB) |
||
|
|
|
iBC (IBC) |
iC (IC)
Рис. 3.8. Соединение обмоток генератора и нагрузки «треугольником»
Применяя первый закон Кирхгофа к узлам А, В и С, найдем связь между линейными и фазными токами. Линейные токи обозначаются прописными буквами с одним буквенным индексом: IΑ, IВ , IC , а
фазные токи – прописными буквами с двойным буквенным индексом:
IΑΒ , IΒC , ICΑ .
При соединении нагрузки «треугольником» для векторов тока в соответствии с первым законом Кирхгофа справедливы соотношения:
|
|
|
|
|
|
|
|
|
|
|
I |
Α = IΑΒ |
− ICΑ ; |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
IΒ = IΒC |
|
|
|
|
(3.14) |
|||||
− IΑB ; |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
IC = ICΑ − IΒC . |
|
|||||||||
76 |
|
|
|
|
|
|
||||

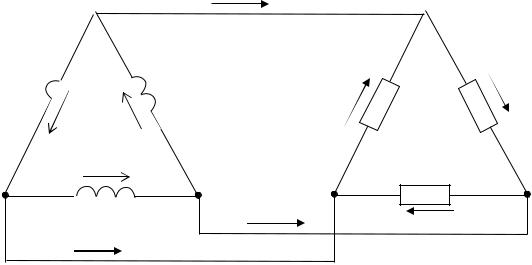
Уравнениям (3.14) удовлетворяет векторная диаграмма на рис. 3.9. На этой диаграмме векторы линейных и фазных токов выходят из одной точки.
|
UAB |
|
|
IC |
IAB |
|
-ICA |
|
|
||
-IBC |
φ |
|
IA |
|
|
||
ICA |
φ |
|
|
|
φ |
|
|
UCA |
|
IBC |
UBC |
|
|
IB
-IAB |
|
Рис. 3.9. Векторная диаграмма трехфазной цепи при |
|
соединении симметричной активно-индуктивной |
|
нагрузки «треугольником» |
|
При симметричной нагрузке |
|
IΑ = IΒ = IC =I Л ; |
(3.15) |
IΑΒ = IΒC = ICΑ = IΦ . |
(3.16) |
Как видно из векторной диаграммы, при симметричной нагрузке
I Л = 2IΦ cos30° = 2IΦ |
3 |
= 3 IΦ . |
(3.17) |
|
2 |
|
|
Таким образом, при соединении «треугольником»: |
|
||
– всегда |
|
|
|
U Л =UΦ ; |
|
|
(3.18) |
– при симметричной нагрузке |
|
|
|
I Л = 3 IΦ ; |
|
|
(3.19) |
– при несимметричной нагрузке для токов справедливы соотно-
шения (3.14).
77

Иногда при анализе трехфазной цепи с нагрузкой, соединенной «треугольником», используют топографическую векторную диаграмму, которую строят исходя из того, что UΦ =U Л . При этом векторы
фазных напряжений, равных линейным напряжениям, изображаются как стороны равностороннего треугольника (рис. 3.10).
IC
-IBC |
|
|
|
|
ICA |
φ |
|
|
|
|
UAB |
|
|
|
UСА |
|
IAB |
|
-ICA |
|
|
|
||
|
φ |
|
IA |
|
φ |
|
|
||
|
|
|
|
|
UBC |
|
|
||
IBC
IB -IAB
Рис. 3.10. Топографическая векторная диаграмма трехфазной цепи при соединении симметричной активно-индуктивной нагрузки «треугольником»
3.5.Мощность в трехфазных цепях
3.5.1.Мощность трехфазной цепи при любом характере нагрузки
Любую схему соединения нагрузки трехфазной цепи можно путем преобразований привести к эквивалентной схеме соединения «звездой».
Трехфазная электрическая цепь состоит из трех однофазных цепей (фаз), поэтому мощности трехфазной цепи можно определить суммой мощностей отдельных фаз.
Активная мощность трехфазной цепи
P = PΑ + PΒ + PC , |
(3.20) |
где РА, РВ, РС – активные мощности фаз А, В, С соответственно.
78

PА =U ΑIΑcosϕΑ ; |
|
|||||||
PВ =U ВI ВcosϕВ ; |
(3.21) |
|||||||
P |
=U |
С |
I |
С |
cosϕ |
С |
, |
|
С |
|
|
|
|
|
|||
где U Α , |
U В , UС – фазные напряжения; IΑ , |
I В , IС – фазные токи; |
||||||||
ϕΑ , ϕВ , |
ϕС – углы сдвига по фазе между соответствующими фазны- |
|||||||||
ми напряжениями и фазными токами. |
|
|
|
|
|
I Α = I Β = IC ; |
||||
При |
симметричной нагрузке |
|
согласно |
(3.11) |
||||||
ϕΑ =ϕΒ =ϕC , следовательно, |
|
|
|
|
|
|
|
|
|
|
|
PΑ = PΒ = PC =UФIФcosϕ. |
(3.22) |
||||||||
При этом условии с учетом выражений (3.6), (3.7), (3.18), (3.19) и |
||||||||||
(3.20) активная мощность трехфазной цепи |
|
|
|
|||||||
|
P = 3UФIФcosϕ = |
|
3U ЛI Лcosϕ. |
(3.23) |
||||||
Аналогичным образом определяются реактивная и полная мощ- |
||||||||||
ности трехфазной цепи. |
|
|
|
|
|
|
|
|
|
|
Реактивная мощность трехфазной цепи |
|
|
|
|||||||
|
Q = QΑ +QΒ +QC , |
|
(3.24) |
|||||||
где QА, QВ, QС –реактивные мощности фаз А, В, С соответственно. |
||||||||||
|
QА =U ΑIΑsinϕΑ ; |
|
|
|||||||
|
QВ =U ВI ВsinϕВ ; |
|
(3.25) |
|||||||
|
Q =U |
С |
I |
С |
sinϕ |
С |
. |
|
|
|
|
С |
|
|
|
|
|
|
|||
При симметричной нагрузке |
|
|
|
|
|
|
|
|
|
|
|
QΑ = QΒ = QC =UФIФsinϕ. |
(3.26) |
||||||||
При этом условии с учетом выражений (3.6), (3.7), (3.18), (3.19) и |
||||||||||
(3.24) реактивная мощность трехфазной цепи |
|
|
||||||||
|
Q = 3UФIФsinϕ = |
3U Л I Лsinϕ. |
(3.27) |
|||||||
Полная мощность трехфазной цепи |
|
|
|
|
||||||
|
S = |
P2 +Q2 . |
|
(3.28) |
||||||
Полная мощность при симметричной нагрузке |
|
|||||||||
|
S = 3UФIФ = |
3U Л I Л . |
(3.29) |
|||||||
3.5.2. Измерение активной мощности в трехфазных цепях
Для измерения мощности трехфазной системы применяют различные схемы включения ваттметров. При симметричной нагрузке в
79
четырехпроводной цепи активную мощность можно измерить одним ваттметром, включенным по схеме, изображенной на рис. 3.11.
А |
* |
|
* |
|
|
В |
|
Z |
N |
Z |
Z |
|
||
|
|
C
Рис. 3.11. Измерение активной мощности одним ваттметром в трехфазной четырехпроводной цепи при симметричной нагрузке
При несимметричной нагрузке мощность трехфазной цепи можно измерить тремя ваттметрами (рис. 3.12).
А |
|
* |
|
* |
W1 |
|
|
В |
* |
|
|
* |
|
Z |
|
|
|
||
|
W2 |
|
|
|
|
|
|
С |
* |
|
|
* |
|
Z |
|
|
Z |
||
|
|
||
|
W3 |
|
|
|
|
|
N
Рис. 3.12. Измерение активной мощности тремя ваттметрами в трехфазной четырехпроводной цепи при несимметричной нагрузке
80

При этом активная мощность трехфазной цепи равна сумме показаний ваттметров:
P = Р1 + Р2 + Р3 , |
(3.30) |
где Р1, Р2, Р3 – показания ваттметров W1, W2, W3 соответственно.
В трехпроводных трехфазных цепях при симметричной и несимметричной нагрузках широко применяют схему измерения мощности при помощи двух ваттметров (рис. 3.13).
А |
|
|
|
|
* |
|
|
|
|
* |
W1 |
|
|
|
|
|
|
|
|
|
В |
* |
|
* |
|
|
|
|
|
|
|
Z |
||
|
|
|
|
|
||
|
|
W2 |
|
|
|
|
|
|
|
|
UAС |
|
|
|
|
|
|
|
|
|
|
|
|
UBC |
|
|
Z |
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
Рис. 3.13. Измерение активной мощности двумя ваттметрами в трехфазной трехпроводной цепи при симметричной и несимметричной нагрузках
На этой схеме токовые (последовательные) обмотки ваттметров включены в фазы А и В, а потенциальные (параллельные) обмотки – на линейные напряжения U ΑC и U BC . Активная мощность нагрузки
равна алгебраической сумме показаний двух ваттметров: |
|
P = Р1 + Р2 . |
(3.31) |
3.5.3. Коэффициент мощности и его технико-экономическое значение. Компенсация реактивной мощности
На современных промышленных предприятиях широко распространены потребители электрической энергии, представляющие собой активно-индуктивную нагрузку, которые не только потребляют активную энергию из сети, но и загружают линию передачи реактивной энергией. К таким приемникам электроэнергии относятся асинхронные двигатели, трансформаторы, индукционные электронагревательные установки, люминесцентное освещение и т.д.
Отношение активной мощности к полной показывает, какая доля
81

полной мощности потребляется нагрузкой, и называется коэффициентом мощности.
cosϕ = |
P |
. |
(3.32) |
|
|||
|
S |
|
|
Таким образом, коэффициент мощности численно равен cosϕ .
В качестве примера на рис. 3.14 показана зависимость силы тока от cosϕ .
I, А
1000
Ia I
800
600
400
Ip
200
0 |
|
|
|
|
|
cos ϕ |
|
0,75 |
0,8 |
0,85 |
0,9 |
0,95 |
1,0 |
||
0,7 |
Рис. 3.14. Зависимость силы тока от cos φ при напряжении сети U=380 В и Р=500 кВт
Из графика видно, что при снижении коэффициента мощности возрастает реактивная составляющая тока, а следовательно, возрастает общий ток линии.
Генераторы, питающие потребители, рассчитывают на определенную номинальную мощность:
Sн = 3U нIн . |
(3.33) |
При заданном напряжении U н генератор может быть нагружен током, не превышающим номинальное значение Iн (U н и Iн – соот-
ветственно линейные значения напряжения и тока). Поэтому увеличение тока потребителя вследствие снижения его cosϕ не должно
превышать определенных пределов.
Чтобы ток генератора не был выше номинального при снижении cosϕ потребителя, необходимо снижать его активную мощность. В этом случае генератор будет полностью загружен по току и недогружен по активной мощности. Недогрузка генератора активной
82

мощностью влечет за собой снижение КПД всей энергетической установки. Себестоимость электроэнергии от этого повышается.
Важным технико-экономическим показателем является и коэффициент реактивной мощности:
tgϕ = |
Q |
. |
(3.34) |
|
|||
|
P |
|
|
Коэффициент tgϕ наглядно выражает реактивную мощность в до-
лях от активной мощности. Связь между коэффициентом мощности и коэффициентом реактивной мощности выражается следующей зависимостью:
cosϕ = |
1 |
. |
(3.35) |
|
1+ tg2ϕ |
||||
|
|
|
Коэффициент мощности является недостаточным показателем для оценки реактивной составляющей нагрузки, особенно при высоких значениях коэффициента мощности, что видно из зависимостей реактивной мощности Q от коэффициента мощности cosϕ и коэффи-
циента реактивной мощности tgϕ, приведенных в табл. 3.1.
Таблица3.1
Зависимостиреактивноймощностиоткоэффициентамощности иоткоэффициентареактивноймощности
Коэффициент мощности |
|
cos φ |
1,0 |
0,98 |
0,96 |
0,94 |
0,92 |
0,90 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
Коэффициент реактивной мощности |
tg φ |
0 |
0,20 |
0,29 |
0,36 |
0,43 |
0,48 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
Реактивная мощность в % |
|
Q |
|
|
|
|
|
|
|
от активной |
|
P |
0 |
20 |
29 |
36 |
43 |
48 |
|
|
|
|
|
|
|
|
|
|
|
Из таблицы видно, что |
при достаточно |
высоком |
значении |
||||||
cosϕ = 0,96 реактивная нагрузка составляет 29% от активной. Поэтому более показательным является коэффициент реактивной мощности tgϕ, выражающий непосредственное значение реактивной мощности
в долях от активной.
Чтобы повысить экономичность энергетических установок, принимают меры для уменьшения реактивной мощности в линии электропередачи. Коэффициент мощности при этом возрастает.
83
Повышения коэффициента мощности промышленного предприятия можно достигнуть лишь правильным сочетанием направленных на это мероприятий, каждое из которых должно быть технически и экономически обосновано. Мероприятия по повышению коэффициента мощности можно разделить на следующие группы:
1)уменьшение потребления реактивной мощности приемниками электрической энергии без применения компенсирующих устройств;
2)применение компенсирующих устройств.
К первой группе мероприятий относятся:
а) упорядочение технологического процесса, ведущее к улучшению энергетического режима оборудования;
б) замена малозагруженных асинхронных двигателей двигателями меньшей мощности;
в) понижение напряжения питания асинхронных двигателей, систематически работающих с малой нагрузкой;
г) ограничение режимов холостого хода двигателей и трансформаторов;
д) повышение качества ремонта двигателей; е) замена малозагруженных трансформаторов трансформаторами
меньшей мощности.
Правильный выбор мощности асинхронных двигателей и трансформаторов, их качественный ремонт и эксплуатация дают возможность понизить коэффициент реактивной мощности до 0,75 и повысить коэффициент мощности до 0,80.
Однако понижение коэффициента реактивной мощности естественным способом в большинстве случаев не позволяет понизить его до величины, требуемой энергоснабжающими организациями (0,4–0,3). Тогда прибегают к искусственным способам понижения коэффициента реактивной мощности при помощи компенсирующих устройств.
Для компенсации реактивной мощности, потребляемой электроустановками промышленного предприятия, могут быть применены синхронные компенсаторы и статические конденсаторы.
Рассмотрим способ компенсации реактивной мощности статическими конденсаторами. На рис. 3.15 показаны асинхронные двигатели, являющиеся приемниками электрической энергии, и эквивалентная схема одной фазы, в которой обмотка статора асинхронного двигателя представлена активным и индуктивным сопротивлениями. В качестве компенсирующего устройства включены конденсаторы.
Активная мощность одной фазы приемника электроэнергии при
84

заданном напряжении определяется активной составляющей тока Ia:
P =UфIcosϕ =U Ia . |
(3.36) |
A
B
C
I R XL
IC C
 I' UФ
I' UФ
Рис. 3.15. Схема включения конденсаторов в качестве компенсаторов реактивной мощности при активно-индуктивной нагрузке (обмотки статора асинхронных двигателей) и эквивалентная схема одной фазы
При заданном значении активной мощности активная составляющая тока должна оставаться неизменной. Наличие реактивной (индуктивной) составляющей тока приводит к увеличению фактического значения тока нагрузки и, как следствие, к увеличению потерь мощности. Снизить ток нагрузки можно только за счет уменьшения реактивной
составляющей тока приемника. |
|
|
|
|||
|
Последнее |
можно осуще- |
UФ |
IC |
||
ствить путем |
параллельного |
|||||
подключения приемника с ем- |
Ia φ |
2 I' |
I |
|||
костным элементом. Все ска- |
|
|
|
|||
|
|
|
||||
занное наглядно иллюстриру- |
|
φ1 |
|
|||
ется |
векторной |
диаграммой |
|
|
||
|
|
|
||||
(рис. 3.16). |
|
|
|
I'p |
Ip |
|
|
Таким образом, c введени- |
|
||||
ем компенсирующего устрой- |
Рис. 3.16. Векторная диаграмма, |
|||||
ства |
уменьшается |
реактивная |
иллюстрирующая компенсацию |
|||
составляющая тока, а следова- |
индуктивной составляющей тока |
|||||
|
|
|
|
85 |
|
|

тельно, уменьшаются полный ток I′ цепи и угол сдвига по фазе между напряжением и полным током цепи.
При определении емкости конденсаторов, необходимых для понижения коэффициента реактивной мощности tgϕ сети до опреде-
ленного значения, исходят из того, что реактивная мощность батареи конденсаторов должна скомпенсировать соответствующую часть реактивной мощности сети. В этом случае реактивную мощность конденсаторов можно определить через активную мощность Р и значения коэффициентов реактивной мощности до установки статических конденсаторов tgϕ1 и после их установки tgϕ2 :
QC = P( tgϕ1 − tgϕ2 ). |
(3.37) |
Величина емкости батареи конденсаторов для одной фазы определяется по формуле
|
10 |
6 Q |
|
||
C = |
|
|
C |
, |
(3.38) |
|
|
|
|||
|
|
3ωU 2 |
|
||
где U – линейное напряжение сети, В; ω = 2πf |
– угловая частота |
||||
питающего напряжения; QC – реактивная мощность конденсаторов; 3
– число фаз.
Обычно при помощи батареи конденсаторов компенсацию угла сдвига фаз осуществляют неполностью, понижая коэффициент реактивной мощности до 0,4–0,3 (коэффициент мощности повышается до 0,90–0,95). Еще большее понижение коэффициента реактивной мощности требует больших затрат на установку батарей конденсаторов, которые в этом случае экономически не оправдываются.
3.6. Примеры расчета трехфазной цепи
Пример 1. Имеется трехфазная четырехпроводная электрическая цепь с нагрузкой, соединенной «звездой» (рис. 3.17).
Дано: UЛ=380 В; RА=6 Ом; RB=8 Ом; RС=10 Ом; XA=8 Ом; XB=6
Ом.
Определить: фазные и линейные токи; активную, реактивную и полную мощности. Построить векторную диаграмму.
Решение.
Из приведенной схемы видно, что нагрузка является несимметричной.
1. Полное сопротивление каждой фазы:
Z A =  RA2 + X A2 =
RA2 + X A2 =  62 +82 =10 Ом;
62 +82 =10 Ом;
86

Z B = RB2 + X B2 = 82 +62 =10 Ом; |
|
||||||
Z |
C |
= R2 |
+ X 2 |
= 102 +02 =10 Ом. |
|
||
|
C |
C |
|
|
|
|
|
A |
|
|
|
|
A |
|
|
IA |
|
|
|
|
RA |
|
|
|
|
|
|
|
|||
B |
|
|
|
|
|
XA |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
IB |
|
|
N |
XB |
|||
|
|
|
|
RC |
|
||
C |
IC |
|
|
C |
|
||
|
|
|
|
||||
IN
N
Рис. 3.17. Трехфазная четырехпроводная электрическая цепь при соединении нагрузки «звездой»
RB
B
2. |
Фазное напряжение |
= U Л |
|
380 |
|
|
|
|
|
|
|||||
|
|
|
|
|
UФ |
= |
= 220 В. |
|
|
|
|
|
|||
3. |
Фазные токи: |
3 |
|
3 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||
I A = |
UФ |
= |
220 |
= 22 А; I B |
= |
UФ |
= |
220 |
= 22 А; IC |
= |
UФ |
= |
220 |
= 22 А. |
|
|
10 |
Z B |
10 |
|
10 |
||||||||||
|
Z A |
|
|
|
|
|
ZC |
|
|||||||
4. Углы сдвига по фазе между фазным напряжением и фазным током:
ϕA = arccos |
RA |
= arccos |
|
6 |
= arccos 0,6 = 53°; |
||||
|
|
10 |
|||||||
|
Z A |
|
|
||||||
ϕB = arccos |
RB |
= arccos |
|
8 |
= arccos 0,8 = 37°; |
||||
|
|
10 |
|||||||
|
Z B |
|
|
||||||
ϕC = arccos |
RC |
= arccos |
10 |
= arccos 1 = 0°. |
|||||
|
|
||||||||
|
|
ZC |
10 |
|
|||||
87 |
|
|
|
|
|
||||

5. Активная мощность трехфазной цепи:
PA=IA UА cos φA=22·220·0,6=2904 Вт; PB=IB UB cos φB=22·220·0,8=3872 Вт; PC=IC UC cos φC=22·220·1=4840 Вт;
P=PA+PB+PC=2904+3872+4840=11616 Вт=11,6 кВт. 6. Реактивная мощность трехфазной цепи:
QA=I AUA sin φA=IA UA X A =22·220·0,8=3872 ВАр;
Z A
QB=IB UB sin φB=IB UB X B =22·220·0,6=2904 ВАр;
Z B
QC=IC UC sin φC=IC UC X C =22·220·0=0;
ZC
Q=QA+ QB+ QC=3872+2904+0=6776 ВАр=6,8 кВАр.
7. Полная мощность трехфазной цепи
S = P2 +Q2  11,62 +6,82 =
11,62 +6,82 =  180,8 =13,4 кВА.
180,8 =13,4 кВА.
|
|
|
UAB |
|
|
|
UA |
|
|
|
|
|
φA |
|
|||
UCA |
IC |
|
IA |
|
|
|
|
|
|
||
|
|
φB |
|
|
|
|
IB |
|
|
UB |
|
UC |
UBC |
|
Рис. 3.18. Векторная диаграмма для трехфазной четырехпроводной схемы
при соединении нагрузки «звездой»
Построение векторной диаграммы (рис. 3.18) следует начинать с векторов фазных напряжений, которые располагаются под углом 120º друг к другу. Концы этих векторов являются вершинами равно-
88

стороннего треугольника, сторонами которого будут векторы линейных напряжений.
В фазах А и В включена активно-индуктивная нагрузка. Векторы фазных токов IA и IB отстают от векторов фазных напряжений на углы φА и φВ соответственно. В фазе С нагрузка активная, следовательно, фазный ток и фазное напряжение совпадают по фазе.
Пример 2. В трехфазную сеть с линейным напряжением UЛ=220 В включен приемник, соединенный «треугольником», сопротивление каждой фазы которого Z=(10+j10) Ом (рис. 3.19). Найти токи в каждой фазе нагрузки и линии. Рассчитать активную мощность цепи. Построить векторную диаграмму. Найти те же величины в случае обрыва линейного провода А.
A |
|
|
|
IA |
R |
|
XL |
|
|
||
B |
IСА |
IАВ |
|
IB |
|
||
XL |
|
R |
|
|
|
|
|
|
XL |
IВС |
R |
C |
|
||
|
|
|
|
IC |
|
|
|
Рис. 3.19. Схема трехфазной цепи при соединении нагрузки «треугольником»
Решение.
Расчет токов в трехфазной цепи проведем комплексным методом. Примем, что вектор линейного напряжения UAB направлен по действительной оси, тогда
U&AB = 220 В; U&BC = 220e− j120° В; U&CA = 220e j120° В.
Определяем фазные токи:
I&AB = |
U&AB |
= |
|
220 |
|
=15,6e− j45° =11− j11 А; |
|||
|
|
10 + j10 |
|||||||
|
|
|
Z |
|
|
||||
I&BC = |
U&BC |
= |
220e− j120° |
=15,6e− j165° = −15 − j4,03 А; |
|||||
Z |
|
||||||||
|
|
|
10 + j10 |
|
|
||||
|
|
|
|
|
|
|
|
|
89 |
I&CA = |
U&CA |
= |
220e j120° |
=15,6e j75° = 4,03 + j15 А. |
|
10 + j10 |
|||
|
Z |
|
||
Находим линейные токи:
I&A = I&AB − I&CA =11− j11−( 4,03 + j15 ) = 6,97 − j26 = 26,9e− j75° А; I&B = I&BC − I&AB =15 − j4,03 −(11− j11) = −26 + j6,97 = 26,9e j165° А; I&C = I&CA − I&BC = 4,03 + j15 −( −15 − j4,03 ) =19 + j19 = 26,9e j45° А.
Активная мощность
Р =  3 U Л I Л cosϕ =
3 U Л I Л cosϕ =  3 220 26,9 cos45° = 7260 Вт.
3 220 26,9 cos45° = 7260 Вт.
Векторная диаграмма токов и напряжений приведена на рис. 3.20.
+J
IBC
45°
UCA
|
|
|
|
|
|
|
|
IC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ICA |
|
|
|
|
|
|
UBC |
|
IBC |
IA |
|
|
|
|||||||
|
|
|
IAB |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
IB |
|
|
45° ICA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
45° |
|
|
|
|
|
|
|
|
|
|
UAB |
|
|
|
|
IAB |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Рис. 3.20. Векторная диаграмма токов и напряжений |
|
|
|||||||||||
Фазные токи при обрыве линейного провода А: |
|
|
||||||||||||
I&BC = |
U&BC |
= |
220e− j120° |
= −15 − j4,03 = −15,53e j15° |
А; |
|
||||||||
|
|
|
10 + j10 |
|
||||||||||
|
|
|
Z |
|
|
|
|
|
|
|||||
I&AB |
= I&CA = |
U&CB |
|
= − |
220e− j120° |
|
= 7,5 + j2,02 = 7,77e j15° |
А. |
||||||
2Z |
|
2(10 + j10 ) |
||||||||||||
|
|
|
|
|
|
|
|
|
||||||
Линейные токи при обрыве линейного провода А:
I A = 0; I&C = −I&B = I&CA − I&BC = 22,5 + j6,05 = 23,3e j15° А.
90

Активная мощность при обрыве линейного провода А
P = PAB + PBC + PCA = I AB2 2R + IBC2 R = 7,772 2 10 +15,532 10 = 3620 Вт.
Пример 3. В четырехпроводную трехфазную сеть с линейным напряжением UЛ=220 В включен «звездой» приемник, активные и индуктивные сопротивления фаз которого соответственно равны:
RA=3 Ом, ХА=4 Ом, RВ=3 Ом, ХВ=5,2 Ом, RС=4 Ом, ХС=3 Ом (рис. 3.21).
Определить токи в линейных и нейтральном проводах, построить векторную диаграмму.
Решение.
Расчет токов в трехфазной цепи проведем комплексным методом. Считаем, что вектор фазного напряжения UA направлен по действительной оси, тогда
U&A = U&Л |
|
=127 В, U&B =127e− j120° В, U&C =127e j120° В. |
|||
3 |
|
|
|
|
|
A |
|
|
|
|
|
|
IA |
|
|
RA |
|
B |
|
|
|
|
XA |
|
|
|
|
|
|
|
|
IB |
RC |
N |
XB |
|
|
XС |
|
|
RB |
C |
|
IC |
|
|
|
|
|
|
|
|
|
IN
N
Рис. 3.21. Схема четырехпроводной трехфазной цепи при соединении нагрузки «звездой»
Линейные токи:
I&A = |
U&A |
= |
127 |
= |
127 |
= 25,4e− j53° А; |
|
3 + j4 |
5e j53° |
||||
|
Z A |
|
|
|||
91

I&B |
= |
U&B |
= |
127e− j120° |
= |
127e− j120° |
= 21,2e− j180° А; |
||||||||
|
|
|
|
3 + j5,2 |
|
|
|
6e j60° |
|
||||||
|
|
ZB |
|
|
|
|
|
|
|||||||
I&C = |
U&C |
|
= |
127e j120° |
= |
|
127e− j120° |
= 25,4e j83° А. |
|||||||
ZC |
|
4 + j3 |
|
|
5e j37° |
||||||||||
|
|
|
|
|
|
|
|
|
|||||||
Ток в нейтральном проводе определяется как векторная сумма линейных токов:
I&N = I&A + I&B + I&C = 25,4e− j53° +21,2e− j180° +25,4e j83° = 5,9e j124° А. +J
UC
IC
φC=37° |
|
|
|
|
|
|
|
|
|
|
|
|
|
IC |
|
|
IN |
|
UA |
|
|
|
|
|
|||
IB |
|
|
|
+ |
||
|
φA=53° |
|||||
φB=60° |
|
|
|
|||
|
|
|
IA |
|
|
|
IB
UB
Рис. 3.22. Векторная диаграмма для трехфазной четырехпроводной схемы
при соединении нагрузки «звездой»
Векторная диаграмма токов и напряжений приведена на рис. 3.22.
Контрольные вопросы
1. Что покажет амперметр после размыкания ключа К, если
UЛ=220 В, R=10 Ом:
A |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
B |
|
|
|
|
|
|
|
|
|
1) |
11 А; |
|||
|
|
|
|
|
|
|
|
|
||||||
C |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
A |
|
К |
2) |
22 А; |
|||||
|
|
|
|
|
|
3) |
12,7 |
А; |
||||||
|
|
|
|
|
|
|
|
|
|
|||||
R |
|
|
R |
|
R |
|
|
|
|
4) |
9,06 |
А? |
||
|
|
|
|
|
|
|
|
|
|
|
|
92 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

2. Как изменится показание амперметра в симметричной трехфазной цепи при обрыве линейного провода А:
1)уменьшится в 3 раза;
2)уменьшится в 2 раза;
3)станет равным нулю;
4)не изменится?
A |
|
A |
|
|
|
B |
ICA |
IAB |
|
|
A |
C |
C |
B |
|
IBC |
|
|
|
3.Лампы накаливания с номинальным напряжением UН=220 В включают в трехфазную сеть с линейным напряжением UЛ=380 В. Определить схему соединения ламп.
1) «звездой» без нейтрального провода;
2) «звездой» с нейтральным проводом;
3) «треугольником»;
4) лампы нельзя включить в сеть.
4.Какой из токов линейный, а какой фазный:
|
|
|
|
A |
|
|
|||
|
|
|
|
|
|||||
1) |
I1, I2 |
– линейные токи; |
I1 |
|
|
|
|
||
|
|
|
|
||||||
2) |
I1, I2 |
– фазные токи; |
|
|
|
|
|
||
B |
|||||||||
3) |
I1 |
– фазный ток, I2 – линейный ток; |
|||||||
|
|
|
|
I2 |
|||||
4) |
I1 |
– линейный ток, I2 – фазный ток? |
|
|
|
|
|||
|
|
|
|
|
|||||
C 
5. Сопротивление фазы симметричного трехфазного приемника равно 22 Ом. Линейное напряжение UЛ=380 В. Что покажет амперметр, включенный в данную цепь:
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1) |
3 А; |
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
2) |
10 |
А; |
|
|
|
A |
|||||
3) |
20 |
А; |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||
4) |
14 |
А? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
6. Линейное напряжение трехфазной сети 380 В. Линейный ток 10 А, коэффициент мощности cos ϕ=0,75. Найти активную мощность трехфазной цепи.
1) 4930 Вт; 2) 6200 Вт; 3) 3800 Вт; 4) 5750 Вт.
93

7. Между какими точками приведенной схемы замеряются линейное и фазное напряжения:
A |
|
|
|
1) |
напряжение UAN – линейное, а на- |
|
|
|
|||
|
|
|
|
||
|
|
|
|
пряжение UВN – фазное; |
|
B |
|
|
N |
2) |
напряжение UAВ – линейное, а на- |
|
|
||||
|
|
пряжение UВС – фазное; |
|||
|
|
|
|||
C |
|
|
|
3) |
напряжение UСA – линейное, а на- |
|
|
|
пряжение UСN – фазное? |
||
|
|
|
|||
8.В трехфазную сеть с линейным напряжением UЛ=380 В надо включить асинхронный двигатель, обмотки которого рассчитаны на напряжение 220 В. Как следует соединить обмотки двигателя:
1)«звездой»; 2) «треугольником»; 3) включить нельзя?
9.Фазное напряжение генератора при системе «звезда» с нейтральным проводом равно 127 В. Какие приемники энергии можно подключить к генератору:
1)с номинальным напряжением 127 В;
2)с номинальным напряжением 220 В;
3)с номинальным напряжением 127 и 220 В?
10.Указать правильную схему подключения вольтметра к трехфазной нагрузке с целью измерения фазного напряжения.
1) |
2) |
3) |
4) |
A |
A |
A |
A |
V |
|
V |
V |
B |
B |
B |
B |
|
|
|
V |
C |
C |
C |
C |
11. Указать правильную схему подключения вольтметра к трехфазной нагрузке с целью измерения линейного напряжения.
1) A |
2) A |
3) A |
|
V |
V |
B |
B |
B |
|
|
V |
C |
C |
C |
|
|
94 |

12. Что произойдет в трехфазной цепи, соединенной по схеме «звезда», при симметричной нагрузке в случае обрыва нейтрального провода:
1) фазные и линейные напряжения останутся неизменными;
2) перераспределение фазных напряжений;
3) перераспределение линейных напряжений?
13. Что произойдет в трехфазной цепи, соединенной по схеме «звезда», при несимметричной нагрузке в случае обрыва нейтрального провода:
1)перераспределение фазных напряжений;
2)фазные и линейные напряжения не изменятся;
3)перераспределение линейных напряжений?
14. Может ли нейтральный провод в четырехпроводной трехфазной цепи обеспечить симметрию фазных напряжений при несимметричной нагрузке:
1)может, если обладает пренебрежимо малым сопротивлением;
2)не может;
3)может, если нагрузка чисто активная?
15.Три активных сопротивления: RA=110 Ом, RВ=220 Ом, RС=220 Ом соединены «звездой» и включены в трехфазную сеть с линейным
напряжением UЛ=380 В. Определить линейные токи IA, IВ, IC при наличии нейтрального провода.
1) IA=1 A; IВ=IC=1 A; 2) IA=4 A; IВ=IC=1 A; 3) IA=2 A; IВ=IC=1 A.
16.Будут ли меняться линейные токи при обрыве нейтрального провода в случае симметричной нагрузки:
A 
1) |
будут; |
B |
|
ZA |
2) |
не будут? |
|
|
|
|
|
|||
|
|
ZC |
|
ZB |
C 
N 
95

17. В симметричной трехфазной цепи показания амперметра А2 составляют 38 А. Чему равно показание амперметра А1:
A |
A2 |
A |
|
|
|
|
1) |
22 |
А; |
||
|
|
|
|||
B |
|
|
2) |
38 |
А; |
|
|
|
3) |
44 |
А; |
C |
C |
A1 B |
4) |
50 |
А? |
|
|
|
|||
|
|
|
|
|
18. Сопротивление фазы симметричного трехфазного приемника равно 10 Ом. Линейное напряжение 220 В. Что покажет амперметр:
A  A
A
B |
|
|
1) |
38 |
А; |
|
|
2) |
50 |
А; |
|
|
|
|
3) |
10 |
А; |
C |
C |
B |
4) 30 |
А? |
|
|
A |
|
|
|
|
|
|
|
|
|
|
19. Сопротивление |
фазы трехфазного |
приемника равно 10 Ом |
||||||||
(ZФ=10 Ом). Что покажет вольтметр, если амперметр показывает |
||||||||||
17,3 А: |
|
|
|
|
|
1) |
50 В; |
|||
A |
|
Zф |
|
|
|
|||||
|
|
|
V |
|
|
|
2) |
73 В; |
||
В |
|
A |
|
|
|
Zф |
||||
|
|
|
|
|
3) 300 |
В; |
||||
|
|
|
|
|
||||||
С |
|
Zф |
|
|
|
4) |
100 |
В; |
||
|
|
|
|
|||||||
|
|
|
|
|
5) |
173 |
В? |
|||
|
|
|
|
|
|
|
|
|||
20. Какое из приведенных уравнений соответствует определению активной мощности для трехфазной цепи при условии симметричной нагрузки:
A
1) Q=3 ΙФ UФ sinϕ ;
2) P=  3 I Л U Л cosϕ;
3 I Л U Л cosϕ;
B
 N 3) P = 3 Ι U ; 4) S = ΙФ UФ ?
N 3) P = 3 Ι U ; 4) S = ΙФ UФ ?
C
96

21. Какое из приведенных уравнений соответствует определению активной мощности для трехфазной цепи при условии несимметричной нагрузки:
1)P = 3 IФ UФ cosϕ;
2)P =  3 I Л U Л cosϕ ;
3 I Л U Л cosϕ ;
3)Q = 3 IФ UФ sinϕ ;
4)P = PA + PB + PC ;
5)Q = QA +QB +QC ?
A
B
 N
N
C
N 
22.Укажите способ повышения коэффициента мощности приемника в цепи переменного тока:
1) последовательно с приемником включить индуктивную катушку;
2) параллельно приемнику включить индуктивную катушку;
3) параллельно приемнику включить конденсатор;
4) нет правильного ответа.
23.К симметричной нагрузке, соединенной «треугольником», приложено линейное напряжение UЛ=220 В, линейный ток IЛ=5 А.
Коэффициент мощности cosϕ=0,8. Найти активную мощность трехфазной цепи.
1) 1140 Вт; 2) 1100 Вт; 3) 1520 Вт; 4) исходных данных недостаточно для расчета.
24. Какое из приведенных уравнений соответствует определению реактивной мощности для трехфазной цепи при условии несимметричной нагрузки:
1)Q = 3 IФ UФ sinϕ ;
2)Q =  3 I Л U Л sinϕ ;
3 I Л U Л sinϕ ;
3)P = 3 IФ UФ cosϕ;
4)Q = QA +QВ +QC ;
5)P = PA + PВ + PC ?
A
B
 N
N
C
97

4. НЕЛИНЕЙНЫЕ ЭЛЕКТРИЧЕСКИЕ ЦЕПИ
4.1. Основные понятия
Электрические цепи могут содержать линейные и нелинейные элементы. Сопротивление линейных элементов не зависит от величины и полярности приложенного к ним напряжения и является величиной постоянной. Вольт-амперная характеристика линейных элементов представляет собой прямую линию. У нелинейных элементов сопротивление не является постоянной величиной. Вольт-амперная характеристика таких элементов нелинейная.
Примерами нелинейных элементов являются лампы накаливания, электронные, полупроводниковые, ионные приборы и т.д.
Строго говоря, все электрические цепи являются нелинейными хотя бы потому, что с изменением тока изменяется температура проводников и, следовательно, и их сопротивление. Однако расчет нелинейных цепей отличается своей сложностью. Закон Ома для расчета таких цепей неприемлем. Нелинейные цепи, как правило, рассчитываются графическим методом. На практике, когда в рабочем диапазоне изменения напряжения и тока вольт-амперная характеристика элемента близка к линейной, непостоянством сопротивления пренебре-
гают и считают этот элемент линейным. |
|
|||||||
I |
При расчете нелинейных це- |
|||||||
пей графическим методом задают- |
||||||||
|
|
|
|
b |
ся графики вольт-амперных харак- |
|||
|
|
|
|
|
|
|
теристик элементов U=f(I). На рис. |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
a |
4.1 в качестве примера приведены |
|||
|
|
|
|
|
|
|
вольт-амперные |
характеристики |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
линейного и нелинейного элемен- |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
тов и их условные графические |
|
|
|
|
|
|
|
|
обозначения на схеме. |
|
|
|
|
|
|
|
|
Нелинейные свойства элемен- |
|
|
|
|
|
|
|
U |
тов могут быть |
источником неже- |
Рис. 4.1. Вольт-амперные харак- |
лательных явлений, например, ис- |
|||||||
кажения формы тока в цепи. Одна- |
||||||||
теристики линейного (а) и не- |
ко в ряде случаев нелинейные |
|||||||
|
линейного (b) элементов |
свойства элементов лежат в основе |
||||||
|
|
|
|
|
|
|
||
принципа действия электротехнических устройств, например выпрямителей, стабилизаторов напряжения, усилителей и т.д.
98

Для реализации таких устройств создаются элементы с необходимыми нелинейными характеристиками на основе диэлектрических, полупроводниковых, ферромагнитных и других материалов.
Так, например, резкая зависимость сопротивления выпрямительных диодов от полярности приложенного напряжения (рис. 4.2,а) используется для преобразования переменного напряжения в постоянное.
I |
I |
|
U |
Uпр |
|
Iпр |
||
I |
||
|
||
Uобр |
U |
|
U |
|
|
|
Iобр |
|
а |
б |
|
|
Рис. 4.2. Условные графические обозначения на схеме и вольт-амперные характеристики полупроводникового диода (а) и полупроводникового стабилитрона (б)
В стабилизаторах напряжения применяются полупроводниковые приборы, называемые стабилитронами. Напряжение на стабилитроне в некотором диапазоне изменения тока остается практически неизменным (рис. 4.2,б).
4.2. Последовательное соединение нелинейных элементов
При последовательном соединении |
|
НЭ1 |
||||||
нелинейных элементов (рис. 4.3) через них |
|
|||||||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
протекает один и тот же ток. Это обстоя- |
|
|
|
|
|
|
|
|
тельство следует учитывать при построе- |
U0 |
|
|
|
|
|
НЭ2 |
|
|
|
|
|
|
||||
нии результирующей характеристики дан- |
|
|
I0 |
|
|
|
||
ной цепи. |
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
Заданы вольт-амперные характеристи- |
|
|
|
|
|
|
|
|
Рис. 4.3. Последовательное |
||||||||
ки I=f1(U) и I=f2(U) двух включенных по- |
||||||||
|
соединение нелинейных |
|||||||
следовательно нелинейных элементов НЭ1 |
элементов |
|
и НЭ2 соответственно (рис. 4.4). Зададимся |
||
|
||
99 |
|
произвольными токами I ′ и I ′′ и произведем для них сложение характеристик по напряжению, т.е. используем свойство последовательного соединения элементов. При этом общее напряжение U0 равно сумме напряжений на участках цепи.
I |
|
|
I=f1(U) |
I=f2(U) |
I=f (U) |
|
|
А0′′ |
|
||||
I ′′ |
|
А1′′ |
А2′′ |
|
А′′ |
|
|
|
|
|
|
|
|
I0 |
А0 |
А1 |
А2 |
|
|
А |
|
|
|
|
|
|
|
|
А′ |
А1′ |
А′ |
А |
′ |
|
I ′ 0 |
|
2 |
|
|
||
U
U1
U2
U0
Рис. 4.4. Построение вольт-амперной характеристики для схемы
с последовательным соединением нелинейных элементов
Так, например, точку А′ вольт-амперной характеристики всей цепи получаем в результате сложения абсцисс А0′А1′ и А0′А2′ . Точно
так же получаем точку А′′ и остальные подобные точки. Соединив точки А′, А′′ и остальные подобные точки плавной кривой, получаем вольт-амперную характеристику всей цепи I=f(U). Теперь отложим на оси абсцисс отрезок, соответствующий в масштабе напряжению U0. Перпендикуляр, проведенный из точки, соответствующей этому напряжению, до пересечения с вольт-амперной характеристикой всей цепи, определяет величину тока цепи I0. Отрезки прямых А0 А1 и
А0 А2 , проведенных через точки А параллельно оси абсцисс (см. рис.
4.4), определяют напряжения U1 и U2 на соответствующих нелинейных элементах НЭ1 и НЭ2.
100

4.3. Параллельное соединение нелинейных элементов
При параллельном |
соединении |
|
|
|
|
|
|
|
|
|
|
I0 |
|
|
|
|
|
|
|
||
нелинейных элементов |
НЭ1 и НЭ2 |
|
|
|
|
I1 |
|
|
I2 |
|
(рис. 4.5) по заданным их вольт- |
U0 |
|
|
|
|
|||||
|
|
|
|
|
|
|
||||
амперным характеристикам (рис. 4.6) |
|
|
|
|
|
|
|
|
||
|
|
НЭ1 |
|
НЭ2 |
|
|
||||
и напряжению U0 необходимо опре- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
делить общий ток I0 и токи I1 и I2. При |
Рис. 4.5. Параллельное |
|
||||||||
параллельном соединении элементов |
соединение нелинейных |
|
||||||||
к каждому из них приложено одно и |
|
|
элементов |
|
||||||
то же напряжение U0 (см. рис. 4.5).
Выполним построение вольт-амперной характеристики всей цепи I=f(U) с учетом этого обстоятельства.
I |
|
|
|
|
А |
А′′ |
I=f (U) |
I0 |
|
|
|
|
|
|
|
А′ |
|
|
|
|
А |
А1′′ |
I=f1(U) |
I1 |
1 |
|
|
|
|
|
|
А1′ |
|
|
|
I2 |
А2 |
А2′′ |
I=f2(U) |
|
|
|
|
А2′ |
|
|
|
А0′ |
А0 |
А0′′ |
U |
U ′ |
U 0 |
U ′′ |
|
Рис.4.6. Построение вольт-амперной характеристики для схемы с параллельным соединением
нелинейных элементов
Задаемся произвольными напряжениями U ′ и U ′′ и, используя первый закон Кирхгофа, сложим ординаты вольт-амперных характеристик НЭ1 и НЭ2, т.е. выполним сложение по току (см. рис. 4.6). По полученной вольт-амперной характеристике всей цепи определим токи I0, I1 и I2.
101

Рассмотренные методы расчета широко используются при анализе цепей, содержащих электронные и полупроводниковые приборы.
4.4. Статическое и динамическое сопротивления нелинейного элемента
У нелинейных элементов различают статическое и дифференциальное (динамическое) сопротивления. Статическим сопротивлением в данной точке а вольт-амперной характеристики (рис. 4.7,а) называется отношение напряжения к току в данной точке
|
|
|
R |
= |
U a |
= |
mU ac |
= m |
R |
tgβ |
1 |
, |
|
(4.1) |
|
|
|
|
|
|
|||||||||||
|
|
|
ст |
|
Ia mI ad |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
mU |
|
||||
где m |
и m |
I |
– масштабы напряжения и тока; m |
R |
|
= |
– масштаб со- |
||||||||
|
|
||||||||||||||
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
mI
противления.
I I
c |
a |
|
∆I |
|
b |
|
|
a |
|
||
|
|
|
e |
||
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Iа |
|
|
|
β1 |
|
β2 |
|
|
|
d |
U |
|
|
|
0 |
|
|
|
||
|
|
|
U |
||
Uа |
|
|
|
||
|
|
0 |
|
||
|
|
|
∆U |
||
|
а |
|
|
||
|
|
б |
|
Рис. 4.7. Определение статического (а) и динамического (б) сопротивлений нелинейных элементов
Динамическое (дифференциальное) сопротивление в точке а определяется как производная от напряжения по току в этой точке (рис. 4.7,б)
R |
= |
dU |
≈ |
∆U |
= |
mU |
|
ae |
= m |
R |
tgβ |
2 |
, |
(4.2) |
|
|
|
|
|||||||||||
дин |
|
dI |
|
∆I mI be |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|||||||
где β2 – угол между касательной к вольт-амперной характеристике в точке а и осью тока.
102

Таким образом, динамическое сопротивление пропорционально тангенсу угла между касательной к вольт-амперной характеристике в точке а и осью тока.
4.5. Цепи с нелинейными двухполюсниками
Как рассматривалось выше, свойства нелинейного резистивного двухполюсника определяются его вольт-амперной характеристикой.
|
I |
Eэкв |
Rэкв |
U |
|
A |
П |
Рис. 4.8. Схема включения нелинейного пассивного двухполюсника П в линейную цепь, представленную линейным активным двухполюсником А
Рассмотрим общий случай включения нелинейного резистивного двухполюсника в произвольную линейную цепь, которую относительно этого двухполюсника представим линейным активным двухполюсником.
Заменим активный двухполюсник эквивалентным источником напряжения (рис. 4.8), уравнение внешней (нагрузочной) характеристики которого имеет вид
или |
|
U = Eэкв − I Rэкв |
(4.3) |
||
|
|
Еэкв −U |
|
|
|
|
|
I = |
. |
(4.4) |
|
|
|
||||
|
|
|
Rэкв |
|
|
Нагрузочная характеристика строится по двум точкам: 1) U=Eэкв, |
|||||
I=0; 2) U=0, I = |
Eэкв |
. |
|
|
|
|
|
|
|
||
|
Rэкв |
|
|
|
|
Точка пересечения А внешней характеристики активного двухполюсника и вольт-амперной характеристики нелинейного двухполюсника I=f(U) определяет рабочий режим цепи (рис. 4.9).
Внешняя характеристика двухполюсника называется нагрузочной характеристикой активного двухполюсника, а графоаналитический метод расчета нелинейной цепи с ее применением – методом нагрузочной характеристики.
103

Метод нагрузочной характеристики пригоден и в случаях, если нелинейная часть цепи содержит последовательное или параллельное соединение нелинейных двухполюсников с известными вольтамперными характеристиками.
|
I |
Еэкв |
I=f(U) |
R |
|
экв |
|
IA |
A |
|
U
UA |
Еэкв |
Рис. 4.9. К расчету нелинейной цепи методом нагрузочной характеристики
Для этого необходимо сложить вольт-амперные характеристики нелинейных двухполюсников, определить рабочую точку на результирующей характеристике методом нагрузочной характеристики.
4.6.Нелинейные цепи переменного тока
Вцепях постоянного и переменного токов широко применяют элементы с нелинейной вольт-амперной характеристикой I=f(U). При переменном токе можно использовать и нелинейные реактивные элементы. К таким устройствам относятся катушки и трансформаторы с ферромагнитным сердечником, имеющие нелинейную зависимость магнитного потока от тока Ф=f(I), конденсаторы, у которых заряд нелинейно связан с напряжением Q=f(U). С помощью нелинейных активных сопротивлений с несимметричной вольт-амперной характеристикой в цепях переменного тока можно осуществлять выпрямление напряжения и тока, так как в кривых напряжений и токов цепи появляются постоянные составляющие, которые можно выделить.
Совместное применение активных и реактивных нелинейных элементов, а также неоднородных источников питания значительно увеличивают число практических задач, успешно решаемых в различных отраслях техники (электронике, автоматике и т.д.).
Вкачестве примера рассмотрим полупроводниковый диод, включенный в цепь переменного тока. Вольт-амперная характеристика
104

диода указывает на то, что его сопротивление при одной полярности приложенного напряжения мало, а при другой – велико.
На рис. 4.10 показана кривая тока в цепи с нелинейной вольтамперной характеристикой диода при синусоидальной форме приложенного к диоду напряжения.
i |
i |
 u
u
90° |
ωt |
90°
ωt
Рис. 4.10. Кривая тока в цепи с нелинейной вольт-амперной характеристикой диода при синусоидальной форме приложенного к диоду напряжения
Каждому мгновенному напряжению u на характеристике i(u) соответствует ток i. Определяя эти величины (см. рис. 4.10) и откладывая их в координатах i, t, можно построить кривую тока в функции времени i(t). В данном случае кривая тока имеет положительные и отрицательные полуволны, но положительные во много раз больше отрицательных.
Построим кривую тока в цепи, состоящей из последовательно соединенных полупроводникового диода и элемента с линейным сопротивлением R, при синусоидальном напряжении источника питания u =U m sinωt . На рис. 4.11 изображены вольт-амперные характери-
стики вентиля (полупроводникового диода) и линейного элемента с сопротивлением R. Для этой схемы справедливо уравнение
u =Umsinωt = uв +uR = uв +iR . |
(4.5) |
105

На основании этого уравнения построена вольт-амперная характеристика всей цепи i(u) путем суммирования падений напряжения на вентиле (uв) и постоянном сопротивлении (uR=iR) при различных значениях тока (см. рис. 4.11).
i |
i(uв) |
i(uR) |
|
i(u) |
|
|
|||
|
|
|
1' |
i(t) |
|
|
|
|
|
0 |
|
|
2' |
ωt |
|
|
|
u
1
2
u(t)
ωt
4.11. Последовательное соединение вентиля и линейного сопротивления R: вольт-амперные характеристики вентиля uв, линейного элемента uR, всей цепи i(u); кривые 1 и 2 напряжения u(t); кривые 1' и 2' тока i(t)
На том же рисунке в координатах u, t построена кривая напряжения в функции времени u(t). Чем больше амплитуда напряжения источника питания, тем сильнее отличаются положительная и отрицательная полуволны в цепи с вентилем. При достаточно больших значениях u отрицательную полуволну тока можно не принимать во внимание и считать, что кривая тока состоит только из положительных полуволн (кривые 1 и 1' на рис. 4.11). Кривая тока такого вида наряду с гармоническими составляющими имеет постоянную составляющую тем большей величины, чем больше напряжение источника и чем больше вольт-амперная характеристика приближается к идеальной. При малой амплитуде напряжения источника прямая и обратная полуволны тока могут оказаться близкими по величине (кривые 2 и 2'). В этом случае выпрямляющее действие вентильного сопротивления незначительно.
106

4.7.Цепи с нелинейными трех- и четырехполюсниками
4.7.1.Основные понятия о трех- и четырехполюсниках
Подобно нелинейным двухполюсникам различают трех- и четырехполюсники. Расчет рабочего режима многих электротехнических устройств упрощается, если их рассматривать как трехполюсники или четырехполюсники. Одна пара зажимов, к которым подключают источник питания, называется входной, а другая пара зажимов, к которым подключается приемник, – выходной. При наличии источников питания трех- и четырехполюсники являются активными, при отсутствии источников питания – пассивными. Четырехполюсники бывают симметричными и несимметричными. В зависимости от того, изменяются или нет режимы в выделенных ветвях, если поменять местами входные и выходные зажимы, четырехполюсники являются необратимыми и обратимыми.
E1
E1
I1 |
|
I |
|
I1 |
|
I2 |
|
2 |
|
|
|
|
|
1 |
|
2 |
E1 |
1 |
|
2 |
|
|
|
|
|
Z2 |
|
U1 |
П |
U2 |
Z2 |
U1 |
|
|
|
|
П |
U2 |
|||
1 |
а |
2 |
|
1 |
б |
2 |
|
|
|
|
|
||
I1 |
|
I2 |
|
I1 |
|
I2 |
1 |
|
2 |
Е2 Z1 |
1 |
|
2 Е2 |
U1 |
П |
U2 |
|
U1 |
П |
U2 |
1 |
2 |
1 |
2 |
в |
|
|
г |
Рис. 4.12. Анализ электрической цепи посредством четырехполюсника:
а– исходная электрическая схема с двумя ветвями; б – четырехполюсник исходной схемы; в – четырехполюсник с двумя источниками питания;
г– обратимый четырехполюсник исходной схемы
107
Режим работы четырехполюсника относительно двух ветвей, которые подключаются к его зажимам, вполне определен, если известны напряжения и токи на входе u1, i1 и выходе u2, i2 (рис. 4.12, а-г).
Задача ставится так: из четырех величин, определяющих режим четырехполюсника, две величины заданы; их можно рассматривать как заданные воздействия на цепь. Необходимо найти две другие величины, которые являются откликами на эти воздействия. На практике чаще приходится рассматривать схемы, в которых одна из ветвей, подключенных к четырехполюснику, содержит источник питания, а другая – приемник. Входными зажимами может быть любая пара зажимов: первичная 1-1 или вторичная 2-2 (рис. 4.12, а-г).
Все линейные пассивные четырехполюсники являются обратимыми. Примером активного четырехполюсника может служить дифференциальный усилитель, пассивного четырехполюсника – двухобмоточный трансформатор, линия телефонной связи, измерительный мост и т.д. Схема линейного пассивного четырехполюсника содержит только линейные резистивные, индуктивные и емкостные элементы. Схема нелинейного четырехполюсника содержит в общем случае как линейные, так и нелинейные резистивные, индуктивные и емкостные элементы. Если две пары выводов соединяются только через четырехполюсник, его включение называется автономным, в противном случае – неавтономным.
4.7.2. Уравнения четырехполюсника
Очень часто в электротехнике и особенно в электронике требуется определить ток и напряжение в одной ветви в зависимости от тока и напряжения в другой. Основная задача анализа четырехполюсников заключается в том, чтобы, пользуясь некоторыми обобщенными параметрами четырехполюсников, аналитически связать напряжения и токи на входе и выходе, не производя расчетов токов и напряжений внутри четырехполюсников. Соотношение между напряжениями и токами U&1 ,U&2 , I&1 , I&2 (см. рис. 4.12, а-в) в двух ветвях выражают с по-
мощью уравнений четырехполюсников.
При линейных соотношениях между токами и напряжениями входа и выхода четырехполюсника имеют место линейные уравнения, связывающие U&1 и I&1 в зависимости от U&2 и I&2 :
108

U&1 = AU&2 + BI&2 |
, |
(4.6) |
||||
& |
& |
2 |
& |
|
|
|
I1 |
= CU |
+ DI2 |
. |
|
||
Уравнения (4.6) называют основными уравнениями четырехполюсника. Коэффициенты A, B, C, D в общем случае являются комплексными величинами и зависят от частоты. Эти коэффициенты определяют расчетным путем при известной схеме замещения четырехполюсника из режимов холостого хода (U&2 = 0 ) и короткого замыка-
ния ( I&2 = 0 ) со стороны выходных зажимов (рис. 4.13):
|
|
& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
A = |
|
U1 |
|
|
|
|
– величина, обратная коэффициенту усиления по |
||||||||||||
|
|
|
|
|
|||||||||||||||
|
& |
|
|
|
|
& |
|||||||||||||
|
U 2 x |
=0 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
I2 |
|
|
|
|
|
|
|
|
|
|
напряжению при разомкнутых выходных зажимах; |
|
|
|
|
|||||||||||||||
|
|
& |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
D = |
|
I1 |
|
|
– величина, обратная коэффициенту усиления по |
||||||||||||||
|
|
|
|
||||||||||||||||
|
& |
|
|
|
|||||||||||||||
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
||||
|
I2к |
=0 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
U2 |
|
|
|
|
|
|
|
|
|
||
току при закороченных выходных зажимах; |
|
|
|
|
|||||||||||||||
|
|
& |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
B = |
|
|
U1 |
|
|
|
– передаточное сопротивление при закороченных |
||||||||||||
|
|
|
|
||||||||||||||||
|
& |
|
|
|
|
||||||||||||||
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
||||
|
I2к |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
U2 =0 |
|
|
|
|
|
|
|
|
|||
выходных зажимах; |
|
|
|
|
|
|
|
|
|||||||||||
|
|
& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
C = |
|
I1 |
|
|
|
|
– |
передаточная |
проводимость |
при разомкнутых |
|||||||||
|
|
|
|
|
|||||||||||||||
|
& |
|
|
|
|
& |
|||||||||||||
|
U 2 x |
=0 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
I2 |
|
|
|
|
|
|
|
|
|
|
выходных зажимах. |
|
|
|
|
|
|
|
|
|||||||||||
I1х |
|
|
|
|
|
|
|
|
|
|
|
I1к |
|
|
|
|
I2к |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
1 |
|
2 |
||||
U1х |
|
|
|
|
|
|
|
|
|
|
U2х |
U1к |
|
|
|||||
|
|
|
|
|
|
|
П |
|
|
|
П |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
1 |
2 |
а |
|
|
б |
Рис. 4.13. Схемы опытов холостого хода (а) и короткого замыкания (б) четырехполюсника
Коэффициенты A, B, C, D называются коэффициентами или параметрами четырехполюсника. Если четырехполюсник обратимый, то справедливо следующее соотношение между коэффициентами:
109
AD–BC=1. |
|
(4.7) |
|
Если четырехполюсник симметричный, то A=D. |
|
||
При питании четырехполюсника со стороны выходных зажимов |
|||
после несложных преобразований получаем уравнения |
|
||
U&1 = AU&2 + BI&2 , |
U&2 = DU& |
1 + BI&1′, |
(4.8) |
|
I&2′ = CU&1 |
|
|
I&1 = CU&2 + DI&2 , |
+ AI&1′, |
|
|
т.е при замене входных и выходных зажимов и выбранных положительных направлениях токов (см. рис. 4.12,г) в основных уравнениях четырехполюсника коэффициенты A и D меняются местами.
Коэффициенты A, B, C, D четырехполюсника опытным путем проще и точнее определять, если измерять входные сопротивления со стороны первичных и вторичных зажимов в режимах холостого хода
и |
|
короткого |
|
замыкания |
Z1x , |
Z1к, |
|
Z2 x , |
Z2к , |
учитывая, |
что |
||||||||||||||||||||||||||||||||||||||||
Z |
1 |
= U&1 = |
|
AU&2 + BI&2 , Z |
2 |
= U&2 = DU&1 + BI&1′ : |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
I&1 |
|
|
CU&2 + DI&2 |
|
|
|
|
I&2′ |
|
|
|
|
|
CU&1 + AI&1′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
Z |
1x |
= |
U&1x |
= z |
|
e jϕ1x |
= |
|
A |
|
; Z |
1к |
= |
|
U&1к |
= z |
e jϕ1к |
= |
B |
; |
|
(4.9) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
& |
|
|
1x |
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
& |
|
|
|
|
1к |
|
|
|
D |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
I1x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I1к |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
U& |
|
|
|
|
|
jϕ |
|
|
|
|
|
D |
|
|
|
|
|
|
|
U& |
|
|
jϕ |
|
|
B |
|
|
|||||||||||||||
|
|
|
|
|
Z2 x |
= |
2 x |
|
= z2 xe |
|
|
2 x |
= |
|
|
|
|
|
|
; Z2к = |
|
|
2к |
|
|
= z2кe |
|
2к = |
|
|
. |
(4.10) |
|||||||||||||||||||
|
|
|
|
|
& |
|
|
|
C |
& |
|
A |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
I2 x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I2к |
|
|
|
|
|
|
|
||||||||||||||
|
|
Из последних четырех уравнений только три являются независи- |
|||||||||||||||||||||||||||||||||||||||||||||||||
мыми, в чем легко убедиться, если составить отношения: |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z1x |
|
= |
AD |
|
и |
Z2 x |
= |
DA |
. |
|
|
|
|
|
|
|
(4.11) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z1к |
CB |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z2к |
|
|
CB |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
Отсюда следует, что для всякого линейного пассивного четырех- |
|||||||||||||||||||||||||||||||||||||||||||||||||
полюсника |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z1x |
|
|
Z2 x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
. |
|
|
|
|
|
|
|
|
(4.12) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z1к |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z2к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Поэтому для вычисления четырех коэффициентов (A, B, C, D) нужно взять любые три из четырех соотношений (4.9), (4.10) и воспользоваться уравнением (4.7).
Решая эту систему из четырех уравнений относительно коэффициентов четырехполюсника, получаем
A = |
Z1x |
; B = |
Z2 x Z1к |
; C = |
1 |
и D = |
Z2 x |
, |
(4.13) |
|
|
Z |
|
||||||
|
Z |
Z |
|
Z |
|
||||
где
110

Z = ( Z1x −Z1к )Z2к . |
(4.14) |
Таким образом, коэффициенты линейного пассивного четырехполюсника не зависят от его напряжений и токов, а определяются только сопротивлениями входящих в него элементов.
4.7.3.Расчет режима работы трехполюсника
вцепи постоянного тока
Рассмотрим расчет нелинейных резистивных трехполюсников (транзисторов, электронных ламп) в режимах, характерных для их работы в схемах усилителей.
Рассмотрим типовое включение нелинейных трехполюсников в цепь постоянного тока. На рис. 4.14 приведены схема включения трехполюсника и вольт-амперные характеристики его входной и вы-
ходной цепей (I1=f1(U1) при U2=const и I2=f2(U2) при I1=const).
|
R1 |
I1 |
|
I2 |
R2 |
|
|
|
|
||
E1 |
|
1 |
|
2 |
E2 |
|
|
|
|
||
|
U1 |
П |
|
U2 |
|
|
|
1' |
2' |
|
|
|
|
|
а |
|
|
I1 |
U2п U2>U2п |
I2 |
|
|
|
U2<U2п |
Е2 |
|
I1>I1п |
||
Е1 |
|
|
|
||
R1 |
|
|
R |
|
I1п |
|
|
|
2 |
A |
|
|
|
|
I2п |
|
|
I1п |
A |
|
|
I1<I1п |
|
|
|
|
|||
0 |
|
U1 |
|
|
U2 |
U1п |
E1 |
0 |
U2п |
E2 |
|
|
б |
|
|
|
в |
Рис. 4.14. Схема включения трехполюсника (а) и вольт-амперные характеристики его входной (б) и выходной (в) цепей
111

На семействе вольт-амперных характеристик строятся нагрузочные характеристики со стороны входа и со стороны выхода трехполюсника (см. рис. 4.14,б,в) .
Уравнение нагрузочной характеристики со стороны входа трехполюсника
U1 = Е1 − I1R1 . |
(4.15) |
Уравнение нагрузочной характеристики со стороны выхода трехполюсника
U 2 = Е2 − I2 R2 . |
(4.16) |
Точки пересечения нагрузочных характеристик со статическими вольт-амперными характеристиками являются рабочими точками трехполюсника при соответствующих напряжениях U2 на входной характеристике и токах I1 на выходной характеристике. Режим в цепи постоянного тока называется режимом покоя, так как рабочий режим трехполюсника определяет одна точка А (см. рис. 4.14,б,в).
4.7.4. Расчет режима работы трехполюсника для переменных составляющих напряжений и токов
Во многих цепях с трехполюсниками, кроме источников постоянных ЭДС, определяющих режим покоя, действует источник переменной ЭДС е (рис. 4.15). При этом на входе и выходе трехполюсника токи и напряжения будут иметь и постоянные Iп, Uп и переменные i, u составляющие. Положение рабочей точки А на вольт-амперной характеристике трехполюсника, определяющей постоянные составляющие тока и напряжения, в общем случае зависит от значений как постоянных ЭДС Е1 и Е2, так и от переменной ЭДС е.
|
R1 |
I1п+i1 |
|
|
I2п+i2 |
R2 |
||
|
|
|
||||||
|
|
1 |
|
|
2 |
|
|
|
e |
|
|
|
|||||
|
|
|
|
|
|
|
||
|
|
U1п+u1 |
П |
|
U2п+u2 |
|
E2 |
|
|
|
|
|
|
||||
E1 |
|
|
|
|
|
|
|
|
1' |
2' |
|
|
|
|
|||
|
|
|
|
|
|
|||
Рис. 4.15. К расчету режима трехполюсника для переменных составляющих напряжений и токов
112
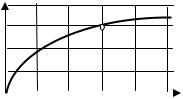
В большинстве практических случаев, например, в цепях с транзисторами, положение начальной рабочей точки можно считать соответствующим режиму покоя, т.е. определять при е=0.
Сизменением на входе трехполюсника переменных составляю-
щих тока i1 и напряжения u1 (с изменением е) изменяются ток i2 и напряжение u2 в выходной цепи трехполюсника.
Сизменением переменной ЭДС е со стороны входа происходит
изменение тока во входной цепи (I1п+i1), что ведет к изменению тока в выходной цепи (I2п+i2), а, следовательно, напряжение (U1п+u1) изменяется пропорционально изменению сигнала на входе.
Для анализа рассматриваемой цепи обычно используют сочета-
ние вольт-амперной характеристики I1=f1(U1) при заданном U2 и I2=f2(U2) при заданном значении I1 и по нагрузочным характеристикам определяют пределы изменения соответствующих параметров. Такой анализ удобно использовать при работе транзисторов в усилительных каскадах. При этом можно использовать соотношения
u1=h11·i1+h12·u2; |
(4.17) |
i2=h21·i1+h22·u2, |
(4.18) |
где h11, h12, h21, h22 – постоянные параметры, соответствующие конкретному транзистору:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
h11 |
dU1 |
|
|
|
; h12 |
dU1 |
|
|
|
|
; |
(4.19) |
|||||||||
= |
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
dI1 |
|
|
U |
2 |
=const |
dU 2 |
|
|
I |
|
=const |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
h21 |
dI2 |
|
|
|
|
; h22 |
dI2 |
|
|
|
|
. |
(4.20) |
||||||||
= |
|
|
|
|
|
|
= |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
dI1 |
|
|
|
=const |
dU 2 |
|
I |
=const |
|
|||||||||||
|
|
|
|
|
|
U |
2 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
Параметры h11, h12, h21, h22 нелинейного трехполюсника рассчитываются по соответствующим вольт-амперным характеристикам.
Контрольные вопросы
1. При заданной вольт-амперной характеристике статическое сопротивление нелинейного элемента в точке А составляет:
1) |
20 Ом; |
U, В |
А |
|
2) |
10 Ом; |
30 |
|
|
3) |
30 Ом; |
20 |
|
|
10 |
|
|
||
4) |
5 Ом. |
|
|
|
0 |
|
|
||
|
|
|
I, А |
|
|
|
1 |
2 3 |
113

2. Диоды D1 и D2 имеют ВАХ, изображенные на рисунке. U=2 В, I1=1 А. Тогда сопротивление резистора R будет равно:
I1 |
D1 |
|
|
|
|
|
|
||
R |
|
|
|
|
I |
D2 |
|
1) 0,25 Ом; |
|
|
|
|||
+ |
U |
|
||
– |
2) 1,5 Ом; |
|||
|
||||
D2 |
D1 |
|
3) 1 Ом; |
|
I, А |
|
|
4) 0,75 Ом. |
|
3 |
|
|
||
|
|
|
||
2 |
|
|
|
|
1 |
|
|
|
|
0 |
1,5 2 |
U, В |
|
|
0,5 1 |
|
3. При заданной вольт-амперной характеристике дифференциальное сопротивление Rдиф в точке а равно:
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
U1 |
|
a |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β |
α |
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
I1 |
|
|
|
1) |
∆U |
= |
|
mU |
|
tg(180°− β) ; 2) |
∆U |
= |
mU |
tgα ; 3) |
U1 |
; |
∆I |
∆I |
|
||||||||||
|
|
|
|
|||||||||
|
|
|
mI |
|
mI |
I1 |
||||||
4) |
∆U |
= |
mU |
tgβ . |
|
|
|
|
|
|
||
∆I |
|
|
|
|
|
|
|
|||||
|
|
|
mI |
|
|
|
|
|
|
|||
4. Симметричная вольт-амперная характеристика нелинейного элемента соответствует рисунку:
I |
|
I |
|
I |
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
U |
U |
|
||
|
U |
U |
|||||
1 |
2 |
3 |
|
4 |
|||
|
|
|
114 |
|
|
|
|

5. При параллельном соединении заданы вольт-амперные характеристики нелинейных сопротивлений. Если ток I2 равен 3 А, то ток I1 составит:
|
|
I |
|
|
|
|
|
|
|
R2 |
|
|
|
|
|
|
|
|
|
|
U, В |
|
R1 |
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
I |
|
|
R1 |
I2 |
|
|
R2 |
20 |
|
|
|
|
|
|
|
|
|
|||||||
1 |
|
|
|
|
|
10 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
0 |
I, А |
|
|
|
|
|
|
|
|
|
|
|
1 2 3 |
||
|
|
|
|
|
|
|
|
|
|
|||
1) 1А; 2) 3А; 3) 4 А; 4) 2А.
6. При последовательном соединении линейного и нелинейного сопротивлений с характеристиками а и б характеристика эквивалентного сопротивления пройдет:
U2 |
U1 |
|
а |
б |
||
|
|
|
U, В |
|
|
|
|
|
|
30 |
|
|
|
|
I |
20 |
|
|
|
|
|
U |
10 |
|
|
|
|
|
0 |
|
|
|
||
|
|
|
|
I, А |
||
|
|
1 2 |
3 |
|
||
1)выше характеристики а;
2)ниже характеристики б;
3)между ними;
4)для ответа недостаточно данных.
7. Динамическое сопротивление отрицательно на одном из участков характеристики, соответствующей рисунку:
U U U U
I I  I I
I I
1 |
2 |
3 |
|
4 |
|
|
|
|
|
115

8. Триггерным эффектом обладает нелинейный элемент, описываемый характеристикой, соответствующей рисунку:
U |
U |
|
U |
U |
|
I |
I |
I |
I |
1 2 3 4
9. Диоды D1 и D2 имеют ВАХ, изображенные на рисунке. Ток в неразветвленной части цепи I=2 А, падение напряжение на диоде D1 U1=1 В. Тогда сопротивление резистора R будет равно:
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
U1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
D1 |
|
|
|
|
|
|
|
D2 |
|
|
1) 0,25 Ом; |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
|
2) 1,5 Ом; |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
D2 |
|
|
|
D1 |
|
|
|
3) 1 Ом; |
|||||||
I, А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4) 0,75 Ом. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0,5 1 |
|
|
|
|
1,5 2 U, В |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||
10.Если при токе I=5,25 А напряжение на нелинейном элементе U=105 В, а при возрастании тока на ∆I=0,5 А напряжение будет равно 115 В, то дифференциальное сопротивление элемента составит:
1) 10 Ом; 2) 30 Ом; 3) 20 Ом; 4) 100 Ом.
11.Какие из перечисленных элементов являются нелинейными: 1) конденсатор; 2) стабилитрон;
3) катушка без сердечника;
4) катушка с ферромагнитным сердечником;
5) транзистор?
116
5.МАГНИТНЫЕ ЦЕПИ
5.1.Магнитное поле и его параметры
Магнитное поле существует вокруг всякого проводника с током, независимо от материала проводника и характера его проводимости. Источники и приемники электрической энергии представляют собой в общем случае сложные электромагнитные устройства, разнообразные по назначению, принципу действия и конструкции. Их работа основана на использовании магнитного поля. О наличии магнитного поля судят по воздействию, которое оно оказывает на помещенные в него тела. Различают индукционное и электромеханическое (силовое) действия магнитного поля.
Индукционное действие магнитного поля состоит в том, что в проводнике, помещенном в переменное магнитное поле, наводится ЭДС. Если магнитное поле постоянное, то ЭДС в проводнике будет наводиться при перемещении проводника в магнитном поле. На индукционном действии магнитного поля основана работа электрических генераторов, трансформаторов, электроизмерительных приборов и т.д.
Электромеханическое, или силовое, действие магнитного поля заключается в том, что помещенные в поле проводник с током или ферромагнитное тело испытывают действие силы со стороны этого поля. На силовом действии магнитного поля основана работа электрических двигателей, электромагнитных муфт, реле, тяговых устройств и др.
Магнитное поле, необходимое для работы электромагнитного устройства, создается в его магнитной системе с помощью возбудителя (катушки с током или постоянного магнита) и локализуется в заданном объеме за счет применения магнитопровода из ферромагнитного материала.
Величина, характеризующая магнитные свойства среды, т.е. способность намагничиваться, называется магнитной проницаемостью среды.
Широкое использование ферромагнитных материалов во всех электромагнитных устройствах связано с тем, что магнитная проницаемость этих материалов во много раз выше магнитной проницаемости воздуха, что позволяет усилить магнитное поле в заданном рабочем объеме.
117

Абсолютная магнитная проницаемость вакуума является величиной постоянной и называется магнитной постоянной
µ0 = 4π 10−7 ≈125 10−8 . |
(5.1) |
||
Магнитная постоянная имеет размерность |
Гн |
. |
|
|
|
||
|
м |
|
|
Абсолютная магнитная проницаемость любой среды |
|||
µа = µ0 µr , |
(5.2) |
||
где µr – относительная магнитная проницаемость среды. |
|||
В зависимости от магнитной проницаемости µr |
все вещества де- |
||
лятся на диамагнитные, парамагнитные и ферромагнитные. Для большинства материалов относительная магнитная проницаемость µr по-
стоянна и близка к единице. Для ферромагнитных материалов µr яв-
ляется функцией тока, создающего магнитное поле, и достигает больших значений (102–105).
Магнитная индукция В – векторная величина, характеризующая магнитное поле и определяющая силу, действующую на движущуюся заряженную частицу со стороны магнитного поля. В системе СИ магнитная индукция измеряется в теслах (Тл).
Магнитное поле называется однородным, если векторы магнитной индукции В во всех его точках одинаковы.
Напряженность магнитного поля Н – векторная величина, которая не зависит от свойств среды и определяется только токами в проводниках, создающими магнитное поле. Напряженность связана с магнитной индукцией
или |
В = µа Н |
|
|
|
(5.3) |
||||
В = µ0 µr Н , |
|
|
|
(5.4) |
|||||
|
|
|
|
|
|
||||
|
В |
откуда |
|
В |
|
|
|||
|
|
|
Н = |
|
. |
(5.5) |
|||
|
|
|
|
|
|
||||
|
|
|
µ0 |
|
|||||
|
|
|
|
|
|
µr |
|
||
|
|
|
В системе СИ напряженность имеет |
||||||
|
|
|
|
А |
|
|
|
|
|
|
S |
|
размерность |
|
|
|
|
||
|
|
|
. |
|
|
|
|
||
|
|
|
м |
|
|
|
|
||
Рис. 5.1. Однородное |
|
|
|
|
|||||
Магнитный поток Ф – это поток маг- |
|||||||||
магнитное поле |
нитной индукции. На рис. 5.1 |
показано |
|||||||
|
|
|
|||||||
однородное магнитное поле, пересекающее плоскость площадью S. Произведение магнитной индукции В однородного магнитного поля
118

на величину площади S, перпендикулярной вектору индукции, называется магнитным потоком Ф.
Ф=В·S. |
(5.6) |
В системе СИ магнитный поток измеряется в веберах (Вб), площадь поперечного сечения – в квадратных метрах (м2).
5.2. Закон полного тока
Если какую-либо площадь, пронизываемую несколькими токами, ограничить замкнутым контуром (рис. 5.2), то сумма произведений элементов длины этого контура dℓ и продольных составляющих векторов напряженности НI в каждой точке этого контура, взятая по всему контуру, называется магнитным напряжением Uм или намагничивающей силой F, которая в системе СИ измеряется в амперах (А).
U м = ∫НI dl = F . |
|
(5.7) |
I2 |
dℓ |
|
I4 |
|
|
I1 |
α |
H |
|
||
I3 |
H1 |
|
|
|
Рис. 5.2. К определению магнитного напряжения
Магнитную цепь большинства электротехнических устройств можно представить состоящей из совокупности участков, в пределах каждого из которых можно считать магнитное поле однородным, т.е. с постоянной напряженностью, равной напряженности магнитного поля Hк вдоль средней линии участка длиной ℓк. Для таких магнитных цепей можно заменить интегрирование суммированием.
Если при этом магнитное поле возбуждается катушкой с током I, у которой w витков, то для контура магнитной цепи, сцепленного с витками и состоящего из n участков, можно записать
n
∑H к lк = I w. (5.8)
к=1
Произведение Нк·ℓк=Uмк является магнитным напряжением участка магнитной цепи.
119
Алгебраическая сумма токов, пронизывающих поверхность, ограниченную замкнутым контуром, называется полным током и обозначается ∑I . Положительными следует считать те токи, направление которых соответствует обходу контура по часовой стрелке (правило буравчика). В частности, для контура на рис. 5.2
∑I = I1 + I2 − I3 + I4 . |
(5.9) |
Закон полного тока устанавливает, что интеграл от напряженности магнитного поля по любому замкнутому контуру равен алгебраической сумме токов, сцепленных с этим контуром:
∫Н dl = ∑I . |
(5.10) |
Так как Нк·ℓк=Uмк, а величина ∑I называется магнитодвижущей силой (МДС), то согласно закону полного тока МДС F равна сумме произведений напряженностей магнитного поля на длины соответствующих участков для контура магнитной цепи. Если число витков катушки с током, сцепленных с контуром, равно wр, то
n |
m |
m |
|
∑H k lk = ∑I p wp = ∑Fp , |
(5.11) |
||
k =1 |
p=1 |
p=1 |
|
где Fp = I p wp – МДС.
5.3. Циклическое перемагничивание
Магнитное состояние ферромагнетика (ферромагнитного материала), подвергающегося переменному намагничиванию, характеризуется гистерезисным циклом. Из курса физики известно, что намагничивание ферромагнитных материалов сопровождается явлением гистерезиса, т.е. отставанием изменения индукции В от изменения напряженности магнитного поля Н.
Если сначала намагнитить материал, т.е. увеличить напряженность магнитного поля Н, а затем уменьшить ее до нуля и далее, изменив направление Н, снова увеличить напряженность с последующим уменьшением до нуля, то в результате такого циклического медленного перемагничивания получим зависимость В=f(H) в виде замкнутого цикла, называемого петлей гистерезиса. На рис. 5.3,б приведена петля гистерезиса тонкостенного тороида из ферромагнитного материала.
Предположим, что ферромагнитный материал тороида, являющегося сердечником катушки, полностью размагничен и ток в катушке
I=0.
120

B |
В |
|
|
|
|
||
H |
Вmax |
|
|
|
|
||
|
Вr |
|
|
I |
|
1 |
|
|
|
||
dr |
|
H |
|
–Hc |
0 Hc |
||
10Hc |
|||
∆r≈0 |
|
2 |
|
|
|
||
w |
–Вr |
|
|
а |
б |
|
Рис. 5.3. Тонкостенная тороидная катушка (а) и кривые ее намагничивания (б): 1 – кривая первоначального намагничивания;
2 – гистерезисный цикл (петля гистерезиса)
Если теперь плавно увеличивать постоянный ток I в катушке, то в ферромагнитном материале возникает магнитное поле, напряженность которого определяется законом полного тока
Н = |
Iw |
, |
(5.12) |
|
2πr |
||||
|
|
|
где 2πr=ℓ – длина контура (средней линии сердечника); w – число витков катушки.
Каждому значению напряженности Н магнитного поля в тороиде соответствует определенная намагниченность ферромагнитного материала и определенная магнитная индукция В.
Если начальное магнитное состояние материала тороида характеризуется значениями Н=0, В=0, то при плавном нарастании тока получим нелинейную зависимость В=f(H), которая называется кривой первоначального намагничивания (см. рис. 5.3,б).
Начиная с некоторых значений напряженности Н магнитного поля, индукция В в тонкостенном ферромагнитном тороиде практически перестает увеличиваться и остается равной Вmax. Эта область зависимости В=f(H) называется областью технического насыщения. Замкнутый цикл В=f(H) называется предельной петлей гистерезиса (гистерезисный цикл). Она характеризуется тем, что при дальнейшем увеличении напряженности магнитного поля форма петли не изменяется. Когда в процессе перемагничивания ток катушки и соответственно напряженность магнитного поля будут равны нулю, магнитная ин-
121
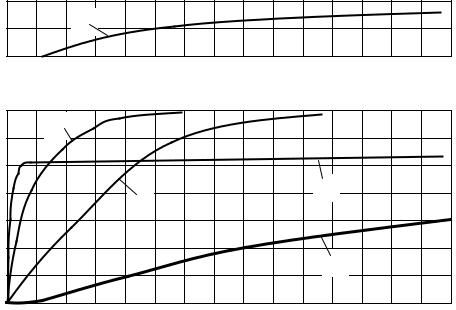
дукция сохранит некоторое значение, называемое остаточной индукцией Вr (см. рис. 5.3,б). Чтобы довести магнитную индукцию до нуля, нужно изменить направление тока в катушке и создать поле напряженностью Нс, которая называется коэрцитивной силой (см. рис. 5.3,б). Две точки предельной петли Вr и Нс являются паспортными характеристиками материала.
Ферромагнитные материалы бывают магнитомягкие и магнитотвердые. У магнитомягких материалов Нс<0,05–0,01 А/м. У магнитотвердых материалов Нс>20–30 кА/м. Магнитотвердые материалы используются для изготовления постоянных магнитов, а магнитомягкие
– для изготовления магнитопроводов электротехнических устройств, работающих в режиме перемагничивания.
Из ферромагнитных материалов с линейными характеристиками изготавливают участки магнитопроводов для катушек индуктивности колебательных контуров с высокой добротностью. Такие контуры применяются в различных радиотехнических устройствах (приемниках, передатчиках), в малогабаритных антеннах средств связи и т.д.
В, Тл |
|
|
|
|
|
|
|
|
|
1,6 |
|
|
1 |
|
|
|
|
|
|
1,7 |
0 |
10 |
20 30 |
40 |
50 |
60 |
70 |
80 |
90 100 110 120 130 Н, А/см |
1,4 |
|
1 |
|
|
|
|
1,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1,0 |
|
|
|
|
|
2 |
0,8 |
|
|
|
|
3 |
|
0,6 |
|
|
|
|
|
|
0,4 |
|
|
|
|
|
4 |
0,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
2 |
4 |
6 |
8 |
10 12 14 16 18 20 |
22 24 26 Н, А/см |
|
Рис. 5.4. Кривые намагничивания: 1 – листовой стали 1511; |
|||||
|
2 – пермаллоя (78,5% Ni); 3 – литой стали; 4 – чугуна |
|||||
На рис. 5.4 приведены основные кривые намагничивания некоторых электротехнических сталей, используемых в электрических машинах, трансформаторах и других устройствах, а также пермаллоя и чугуна.
122

5.4. Свойства магнитных цепей
Магнитной цепью называется совокупность источников МДС и магнитопроводов (ферромагнитных тел или сред), предназначенных для создания в определенном месте электротехнического устройства магнитного поля требуемой интенсивности, определенной конфигурации и надлежащей направленности. Магнитные цепи бывают простые и сложные (разветвленные), однородные и неоднородные (состоящие из различных материалов) (рис. 5.5).
Однородная |
Неоднородная |
|
Симметричная |
Несимметричная |
|
Неразветвленные |
|
Разветвленные |
|||
Рис. 5.5. Эскизы типов магнитных цепей |
|
||||
В однородной магнитной цепи, образованной замкнутым магни- |
|||||
топроводом, например, тороидом с равномерно распределенной об- |
|||||
моткой, обтекаемой током (рис. 5.6), |
+ |
I |
|
||
каждый виток обмотки создает линии |
ℓср |
||||
магнитной индукции, которые, замы- |
– |
|
|||
каясь по магнитопроводу, сливаются |
|
|
Ф |
||
в общий магнитный поток. В этой це- |
|
|
|||
|
a |
|
|||
пи магнитные линии проходят в од- |
|
|
|||
|
|
b |
|||
ной среде и напряженность магнит- |
|
|
|||
|
|
|
|||
ного поля вдоль линий не изменяется. |
ℓab |
|
dℓ |
||
H = F |
= I w , |
(5.13) |
|
||
|
|
|
|||
lср |
lср |
|
|
H |
|
где w – число витков; ℓср – длина средней линии магнитопровода; F=I·w – намагничивающая сила обмотки.
Однако на практике чаще встречаются устройства не с равномерно распределенной обмоткой, а с об-
моткой, сосредоточенной в одном месте кольцевого или прямоугольного магнитопровода. В этих случаях часть магнитных линий замыкается не только по магнитопроводу, но и в окружающем пространстве, образуя линии рассеяния магнитного потока. Для удобства расчета
123
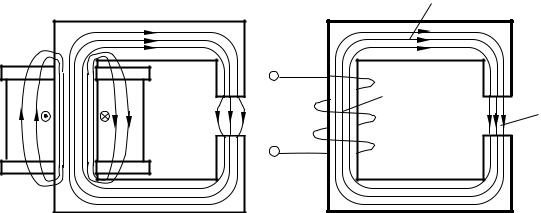
магнитных цепей реальную картину заменяют идеализированной (рис. 5.7). Для магнитной цепи, содержащей два неоднородных участка ℓфм и ℓв, в соответствии с законом полного тока справедливо уравнение
Нфм·ℓфм+Нв·ℓв=I·w |
(5.14) |
или |
|
Uмфм+Uмв=I·w, |
(5.15) |
где Нфм и Нв – напряженности магнитного поля в ферромагнетике и в воздухе соответственно; ℓфм – длина средней линии в ферромагнетике; ℓв – длина средней линии в воздушном зазоре; Uмфм – магнитное напряжение на участке ферромагнетика; Uмв – магнитное напряжение в зазоре (между полюсами ферромагнетика).
+ |
– |
а |
Ффм |
Ф |
Фв |
б |
Рис. 5.7. Магнитная цепь с незамкнутым прямоугольным магнитопроводом и сосредоточенной намагничивающей обмоткой: а – реальная картина магнитного поля;
б – идеализированная магнитная цепь
Таким образом, в неоднородной магнитной цепи для любого замкнутого магнитопровода сумма магнитных напряжений на участках цепи равна МДС обмотки магнитопровода. Если обмоток несколько, то их МДС складываются. Это свойство магнитной цепи является полной аналогией со вторым законом Кирхгофа для электрической цепи.
Для анализа магнитных цепей используют также вебер-амперную характеристику
Ф=f(Uм), |
(5.16) |
выражающую графическую зависимость магнитного потока от магнитного напряжения участка или всей магнитной цепи. Магнитный
124

поток при этом определяется магнитной индукцией В и площадью поперечного сечения магнитопровода S, т.е. Ф=В·S, а магнитное напряжение Uм – напряженностью магнитного поля Н и длиной участков цепи ℓ:
Uм=Н·ℓ. |
(5.17) |
Аналогию с первым законом Кирхгофа для электрических и магнитных цепей получаем на основании известной из курса физики теоремы Гаусса, согласно которой поток вектора магнитной индукции В через любую замкнутую поверхность равен нулю. Рассмотрим магнитную цепь (рис. 5.8).
|
Ф2 |
|
Ф |
+ |
А |
|
|
|
Ф1 |
– |
|
|
Рис. 5.8. Схема магнитной цепи |
За счет тока, протекающего через катушку, возникает магнитное поле и в магнитопроводе создается магнитный поток Ф. Этот поток в точке А разветвляется на потоки Ф1 и Ф2. Так как силовые линии магнитного поля непрерывные и замкнуты, должно выполняться соотношение
Ф=Ф1+Ф2 |
(5.18) |
или
Ф–Ф1–Ф2=0. (5.19)
Следовательно, алгебраическая сумма магнитных потоков для любого узла магнитной цепи равна нулю. Это уравнение выражает первый закон Кирхгофа для магнитной цепи.
На основании приведенных уравнений и сопоставления соответствующих магнитных и электрических величин можно составить следующую таблицу сравнений (табл. 5.1).
125
Таблица 5.1
Сопоставление величин в магнитных и электрических цепях
|
Магнитная цепь |
Электрическая цепь |
|
F=I·w – МДС |
Е – ЭДС |
|
Ф – магнитный поток |
I – электрический ток |
Rм – магнитное сопротивление |
R – электрическое сопротивление |
|
Uм=Н·ℓ=Rм·Ф – магнитное напряжение |
U=R·I – электрическое напряжение |
|
∑Фi |
= 0 – первый закон Кирхгофа |
∑Ii = 0 – первый закон Кирхгофа |
∑U мi |
= ∑Fk – второй закон Кирхгофа |
∑U = ∑Ek – второй закон Кирхгофа |
Продолжая аналогию между магнитной и электрической цепями, можно получить также выражение закона Ома для магнитной цепи. Так, для ферромагнитного участка цепи (рис. 5.7,б)
Ф = В S |
фм |
= Н |
фм |
µ |
0 |
µ |
r |
S |
фм |
= |
( Iw )фм µ0 µr Sфм |
= |
|
|||||
|
|
|
||||||||||||||||
фм |
|
|
|
|
|
|
|
|
|
lфм |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.20) |
|||
|
|
|
|
( Iw )фм |
|
|
|
|
|
Fфм |
|
|
||||||
|
= |
|
|
|
|
|
= |
, |
|
|||||||||
|
|
lфм /( µ0 µr Sфм ) |
|
|
||||||||||||||
|
|
|
|
|
Rмфм |
|
||||||||||||
где Fфм, Rм фм=ℓфм/(µ0·µr·Sфм) – соответственно МДС и магнитное сопротивление ферромагнитного участка цепи.
Аналогично для воздушного зазора
Ф = |
Fв |
, |
(5.21) |
|
|||
|
Rмв |
|
|
где Fв – МДС немагнитного участка цепи (зазора); Rмв=ℓв/(µ0·Sв) – магнитное сопротивление воздушного зазора.
Между расчетами нелинейных электрических цепей постоянного тока и магнитных цепей с постоянными МДС нетрудно установить аналогию. Действительно, магнитное напряжение на участке магнитной цепи равно произведению магнитного сопротивления участка на магнитный поток
Uм=Rм·Ф. |
(5.22) |
Эта зависимость аналогична закону Ома для резистивного элемента электрической цепи постоянного тока U=R·I. Сумма магнитных напряжений в контуре магнитной цепи равна сумме МДС этого контура
∑U м = ∑F . |
(5.23) |
126 |
|

Продолжая дальше аналогию между |
|
|
Uм1 |
|||||
электрическими цепями постоянного тока |
|
|
|
|
|
|
|
|
и магнитными цепями с постоянными |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rм1 |
||||||
МДС, представим неразветвленную маг- |
|
|
||||||
|
|
|
|
|
|
|
|
|
нитную цепь (см. рис. 5.7,б) схемой за- |
|
|
|
|
|
|
|
|
мещения (рис. 5.9). Эта схема замещения |
|
|
|
|
Rм2 |
|
|
Uм2 |
и схема замещения нелинейной электри- |
|
F=I·w |
|
|
||||
|
|
|
|
|||||
ческой цепи с последовательным соеди- |
|
|
Ф |
|||||
нением элементов полностью аналогичны |
|
|
||||||
|
|
|
|
|
|
|
|
|
(с точностью до обозначения параметров |
Рис. 5.9. Схема замещения |
|||||||
элементов). Следовательно, для анализа |
|
неразветвленной |
||||||
неразветвленных магнитных цепей (а |
|
магнитной цепи |
||||||
также и разветвленных магнитных цепей) |
|
|
|
|
|
|
|
|
с постоянной МДС можно пользоваться всеми графическими и аналитическими методами расчета нелинейных электрических цепей постоянного тока.
В качестве иллюстрации ограничимся применением для анализа неразветвленной магнитной цепи на рис. 5.9 графических методов: метода сложения вебер-амперных характеристик (рис. 5.10,а) и метода нагрузочной характеристики (рис. 5.10,б).
Ф
Ф
0
Ф(Uм2) Ф(Uм1) |
Ф |
Ф(Uм1) |
F |
||
|
Rм2 |
|
|
Ф |
А |
Ф(Uм1+Uм2) |
|
|
|
Ф = |
|
|
|
|
|
Uм=Н·ℓ |
|
|
|
|
Uм2 |
Uм1 |
F |
|
Uм1 |
|
Uм2 |
|
|
|||||
|
||||||
|
а |
|
|
|
|
б |
Рис. 5.10. Анализ неразветвленной магнитной цепи методом сложения вебер-амперных характеристик (а)
и методом нагрузочной характеристики (б)
F −U м1
Rм2
Uм=H·ℓ
Согласно первому методу построим вебер-амперную характеристику всей неразветвленной магнитной цепи Ф(Uм1+Uм2), графически
127
складывая по напряжению вебер-амперные характеристики ее двух участков. При известной МДС F=Iw по вебер-амперной характеристике всей магнитной цепи определим рабочую точку А, т.е. магнитный поток Ф, а по вебер-амперным характеристикам участков магнитопровода – магнитные напряжения на каждом из них.
Согласно второму методу для второго (линейного) участка построим нагрузочную характеристику
Ф = |
U м2 |
= |
F −U м1 |
, |
(5.24) |
|||
r |
r |
|||||||
|
|
|
|
|
|
|||
|
м2 |
|
м2 |
|
|
F |
|
|
т.е. прямую, проходящую через точку F на оси абсцисс и точку |
||||||||
r |
||||||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
м2 |
||
на оси ординат. Точка пересечения А нагрузочной характеристики с вебер-амперной характеристикой ферромагнитного участка цепи Ф(Uм1) определяет магнитный поток Ф в цепи и магнитные напряжения на ферромагнитном участке Uм1 и воздушном зазоре Uм2. Значение индукции в воздушном зазоре
В2 = |
Ф |
. |
(5.25) |
|
|||
|
S2 |
|
|
При расчете магнитных цепей встречаются две задачи: прямая и обратная. Если задан магнитный поток и требуется определить МДС, т.е. намагничивающую силу, то задача является прямой. Если задана МДС (намагничивающая сила) и требуется определить магнитный поток, задача является обратной.
5.5. Пример расчета магнитной цепи
На рис. 5.11 даны в миллиметрах геометрические размеры сердечника магнитной цепи, выполненного из электротехнической стали марки Э11.
Требуется определить намагничивающую силу F=Iw, которая необходима для создания магнитного потока Ф=2·10–3 Вб, величину тока I в катушке, содержащей w=1000 витков, и индуктивность катушки L.
Решение.
Магнитную цепь делим на участки так, чтобы в пределах каждого участка материал и сечение сердечника оставались неизменными.
В нашем случае таких участков три: l1, l2 и l0. Контур, по которому составляем уравнение, пользуясь законом полного тока, проходит по средней магнитной линии
128

|
l1=150–25=125 мм, |
|
l2 = l2′ +l2′′ =125 +2 107,5 −2 = 338 мм. |
||
|
|
l′2 |
|
140 |
|
25 |
|
=2 |
|
|
0 |
|
|
ℓ |
ℓ1 |
100 |
150 |
|
||
25 |
|
|
|
|
l′2′ |
|
|
50 |
40 |
75 |
25 |
Рис. 5.11. Сердечник магнитной цепи |
||
Далее определяем магнитную индукцию в каждом участке цепи, для чего находим сечения сердечника S1 и S2:
S1=40·50=2000 мм2=2·10–3 м2,
S2=50·25=1250 мм2=1,25·10–3 м2.
Магнитная индукция
B |
= |
Ф |
|
= |
2 10−3 |
|
=1,0 Тл, |
||||||
S |
|
2 |
10−3 |
||||||||||
1 |
|
|
|
|
|
|
|
|
|||||
|
|
|
1 |
|
|
|
2 10−3 |
|
|
||||
B = |
Ф |
= |
|
|
|
=1,6 Тл. |
|||||||
|
|
|
|
|
|
|
|
|
|||||
2 |
|
S2 |
|
|
1,25 10−3 |
|
|||||||
|
|
|
|
|
|||||||||
Напряженность магнитного поля для ферромагнитных материалов определяем по кривым намагничивания B=f(H), которые приводятся в справочной и учебной литературе.
В нашем случае для электротехнической стали марки Э11 имеем Н1=502 А/м и Н2=4370 А/м. Для воздушного зазора l0 напряженность магнитного поля определяется из равенства
Н0=8·105, В0=8·105·1,6=1280000 А/м.
129
Искомая намагничивающая сила, которая равна произведению тока на число витков катушки, по которой он протекает, согласно закону полного тока будет равна
F=Iw=H1l1+ H2l2+ H0l0=0,125·502+0,338·4370+2·10–3·1280000≈4000 A.
Ток в катушке
I = |
F |
= |
4000 |
= 4 А. |
|
w |
|
1000 |
|
Индуктивность катушки
|
ψ |
|
wФ |
|
1000 |
2 |
10−3 |
|
L = |
|
|
= |
|
= |
|
|
= 0,5 Гн, |
|
I |
I |
|
4 |
||||
|
|
|
|
|
|
|||
где ψ – потокосцепление.
Контрольные вопросы
1. Магнитопровод выполняется из ферромагнитного материала:
1) для создания в электротехническом устройстве магнитного поля нужной конфигурации и интенсивности;
2) снижения стоимости электротехнического устройства;
3) повышения надежности электротехнического устройства;
4) увеличения жесткости конструкции электротехнического устройства.
2. Магнитодвижущую силу (МДС) вдоль магнитной цепи можно представить в виде:
I |
|
|
|
|
|
|
|
1) |
Iw=H (ℓ1+ℓ2); |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
w |
|
ℓ1, S1 |
|
|
|
|
ℓ2, S2 |
2) Iw=(H1+H2) (ℓ1+ℓ2); |
|
|
|
|
|
|
|
|
|
3) |
Iw=H1/ℓ1+H2/ℓ2; |
|
|
|
|
|
|
|
|
4) |
Iw= H1·ℓ1+H2·ℓ2. |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. Еcли увеличить амплитуду синусоидального напряжения Um на катушке со стальным сердечником (магнитопровод не насыщен), то амплитуда магнитной индукции в сердечнике Bm:
1) уменьшится; 2) увеличится; 3) не изменится; 4) для ответа недостаточно данных.
130

4.Ферромагнитный материал принято считать магнитотвердым, если он характеризуется:
1) низким значением остаточной индукции Br ;
2) высоким значением индукции насыщения BS ;
3) низким значением коэрцитивной силы Нс ;
4) высоким значением коэрцитивной силы Нс.
5.Законом Ома для магнитной цепи называют уравнение:
1)Ф = IwR |
= FR ; 2) |
Ф = |
Iw |
= |
|
F |
|
; 3) Ф = |
Iw |
= |
|
F |
; |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
M |
|
|
M |
U M |
U M |
|
|
RM |
RM |
|||||||||||||
|
|
RM |
|
|
RM |
|
|
|
||||||||||||||||
4) Ф = |
= |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Iw |
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
6. МДС вдоль приведенной магнитной цепи можно представить в |
||||||||||||||||||||||||
виде: |
|
|
|
|
|
|
|
|
|
|
|
|
Ф |
|
|
|
|
|
|
|
|
|
||
1) |
Iw=Bфер·ℓфер+Вδ·δ; |
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
2) |
Iw=Нфер/ℓфер+Нδ/δ; |
|
w |
|
|
|
|
|
|
|
|
|
|
|
|
|
δ |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
3) |
Iw=Нфер·ℓфер+Нδ· δ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
4) |
Iw=Ф·ℓфер+Фδ·δ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ℓфер |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7. Величину магнитодвижущей силы F обмотки определяют как:
1) |
F=IФ; |
I |
Ф |
2) |
F=Iw; |
|
w |
3) |
F=I; |
|
|
|
|
4)F=I/w.
8.Связь между электрическим током и напряженностью магнитного поля устанавливается законом полного тока и записывается в виде:
1) ∫Edl = ∂D ; 2) ∫Hdl = ∑I ; 3) ∫Hdl = − |
∂Ф ; 4) ∫Hdl = ∑ j . |
||||
|
|
|
|
|
b |
l |
∂t |
l |
l |
∂t |
a |
131

9. Если при том же значении тока I магнитопровод, выполненный из стали с кривой намагничивания А, заменить на магнитопровод с кривой намагничивания Б, магнитный поток Ф:
|
|
В |
I |
Ф |
А |
|
|
|
w |
|
Б |
Н
1) увеличится; 2) уменьшится; 3) не изменится; 4) для ответа недостаточно данных.
10. Если заданы величина МДС F=200 А, длина средней линии ℓфер=0,5 м, площадь поперечного сечения S=10·10–4 м2 магнитопровода и основная кривая намагничивания материала сердечника, то магнитный поток Ф составит:
|
S |
|
В, |
|
|
|
|
|
|
|
|
I |
|
|
Тл |
|
|
|
|
|
|
|
|
|
w |
Ф |
1,0 |
|
Н, А/м |
|
|
|
|||
|
|
0 |
|
||
|
|
|
600 |
1000 |
|
|
|
|
200 |
||
|
|
|
ℓфер |
|
|
1) 0,002 Вб; 2) 0,0015 Вб; 3) 0,0024 Вб; 4) 0,005 Вб.
11.Величина относительной магнитной проницаемости ферромагнитных материалов:
1) µr=1; 2) µr>>1; 3) µr<1; 4) µr=0.
12.Индуктивность контура, по которому протекает ток I=3,5 А, L=3,5 мГн. Определить потокосцепление самоиндукции контура.
1) 0,01225 Вб; 2) 0,001 Вб; 3) 0,0035 Вб; 4) 7 Вб.
13.Энергия, запасенная в катушке, W=5,4 Дж. Определить ток в катушке, если ее индуктивность L=0,3 Гн.
1) 4,2 А; 2) 6 А; 3) 8,5 А; 4) 10А.
132

14. Если при неизменном магнитном потоке уменьшить площадь поперечного сечения S магнитопровода, магнитная индукция В:
S
I |
Ф |
1) |
увеличится; |
|
2) уменьшится; |
||||
|
||||
|
w |
3) |
не изменится; |
|
|
|
4) |
для ответа недоста- |
|
точно данных.
15. Для катушки со стальным сердечником, включенной в сеть синусоидального напряжения, при учете потоков рассеяния на основании второго закона Кирхгофа относительно мгновенных значений можно записать:
1) u= –e –eрасс+Ri; 2) u=Ri; 3) u= –e; 4) u= –eрасс.
16.Величина магнитной индукции В используется при описании: 1) теплового поля; 2) поля механических напряжений; 3) магнитного поля;
4) электростатического поля.
17.Если при неизменных магнитодвижущей силе F и длине уча-
стка магнитопровода ℓ2 увеличить длину участка магнитопровода ℓ1, то магнитный поток Ф:
1) |
увеличится; |
I |
|
|
2) |
уменьшится; |
|
|
|
|
|
|
||
3) |
не изменится; |
w |
ℓ1, S1 |
ℓ2, S2 |
4) |
для ответа не- |
|
||
|
Ф |
|
||
достаточно данных. |
|
|
||
18. По катушке с индуктивностью L=0,5 Гн протекает ток I=3,6 А. Определить потокосцепление самоиндукции и энергию, запасенную в катушке.
1) 1,8 Вб; 3,24 Дж; 2) 3,6 Вб; 1,62 Дж; 3) 1,8 Вб; 1,62 Дж; 4) 3,6 Вб; 3,24 Дж.
133

6. ТРАНСФОРМАТОРЫ
Трансформатором называется статический электромагнитный аппарат, служащий для преобразования электрической энергии переменного тока с одними параметрами в электрическую энергию с другими параметрами.
Трансформаторы позволяют передавать мощность от источника к приемнику при разных напряжениях и токах. Без учета потерь мощности
S=U1·I1=U2·I2=const, |
(6.1) |
где U1, I1 – соответственно напряжение и ток первичной обмотки; U2, I2 – соответственно напряжение и ток вторичной обмотки.
Трансформаторы используются для преобразования электрической энергии при передаче ее на расстояния. На электростанции электрическая энергия вырабатывается посредством синхронных генераторов напряжением от 6 до 35 кВ. При передаче такого напряжения на большие расстояния будут большие потери мощности в ЛЭП. Эти потери пропорциональны квадрату тока. Для уменьшения потерь уменьшают силу тока за счет увеличения напряжения. Поэтому на выходе электрической станции устанавливают трансформаторные подстанции, на которых напряжение повышается до величины 750– 1150 кВ. Перед населенными пунктами устанавливают понижающие трансформаторные подстанции.
Трансформаторы используются также во вторичных источниках электропитания, в различных электронных схемах.
6.1. Принцип действия трансформатора
Трансформатор выполнен на базе замкнутого магнитопровода, собранного из листов электротехнической стали.
|
i1 (I1) |
|
|
|
i2 (I2) |
|
|
|
|
|
|
|
|
u1(U1) |
Е1 |
w1 |
w2 |
Е |
u2(U2) |
Z2 |
|
|
2 |
|
|||
|
|
|
Ф0 |
|
|
|
 Магнитопровод
Магнитопровод
Рис. 6.1. Трансформатор с одной вторичной обмоткой
(w1, w2 – число витков первичной и вторичной обмоток соответственно)
134
На магнитопроводе имеются обмотки. Трансформатор обычно имеет одну первичную и одну или несколько вторичных обмоток. Рассмотрим трансформатор с одной вторичной обмоткой (рис. 6.1).
Под действием напряжения, приложенного к первичной обмотке, в ней протекает ток I1, создающий основной магнитный поток Ф0, замыкающийся по магнитопроводу. Кроме основного, возникает еще магнитный поток рассеяния ФS1, замыкающийся по воздуху.
Произведение I1w1 является намагничивающей силой первичной обмотки, определяющей величину магнитного потока Ф1.
Таким образом,
|
|
|
|
|
|
|
(6.2) |
Ф1 = Ф0 +ФS1 . |
|||||||
Магнитный поток рассеяния ввиду большого сопротивления воздуха очень мал, и им можно пренебречь. В режиме холостого хода магнитный поток рассеяния составляет всего 0,25% от основного потока, поэтому им можно пренебречь и считать, что
Ф1=Ф0. (6.3)
Основной магнитный поток Ф0 наводит ЭДС самоиндукции в первичной обмотке Е1 и ЭДС взаимоиндукции Е2 во вторичной обмотке:
Е1=4,44f1w1Ф0; |
(6.4) |
||||||||||
Е2=4,44f1w2Ф0. |
(6.5) |
||||||||||
Напряжение, подводимое к первичной обмотке, уравновешивает- |
|||||||||||
ся ЭДС Е1 и падением напряжения в этой обмотке. |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
U1 = E1 + I1Z1 , |
(6.6) |
||||||||||
где Z1 – полное сопротивление первичной обмотки. |
|
||||||||||
Коэффициент трансформации |
|
|
|
|
|
||||||
KТР = |
E2 |
|
= |
w2 |
. |
(6.7) |
|||||
|
|
||||||||||
|
|
|
|
|
E1 |
|
w1 |
|
|||
Трансформатор может работать либо в режиме холостого хода, когда вторичная обмотка разомкнута, либо в нагруженном режиме, когда ко вторичной обмотке подключена нагрузка.
6.2. Работа трансформатора в режиме холостого хода
Электрическая схема трансформатора в режиме холостого хода представлена на рис. 6.2.
В этом режиме
Ф0=Ф1. |
(6.8) |
135

Напряжение на вторичной обмотке равно наводимой в этой об-
i1(I1) |
|
мотке ЭДС |
|
|
|
U2=E2, |
(6.9) |
||
|
|
|||
|
|
так как без нагрузки падение на- |
||
u1(U1) Е1 w1 w2 Е2 |
u2(U2) |
пряжения во вторичной обмотке |
||
|
|
равно нулю. |
|
|
Рис.6.2. Электрическая схема |
В режиме |
холостого |
хода |
|
ток первичной |
обмотки мал и |
|||
трансформатора в режиме |
|
составляет 3–6% от номинально- |
||
холостого хода |
го значения. Причем меньший |
|
процент относится к более мощным трансформаторам. Поэтому потери напряжения I1Z1 в самой обмотке трансформатора малы, и можно считать, что
U1≈Е1, |
(6.10) |
следовательно, в режиме холостого хода коэффициент трансформации можно определить как
|
|
|
|
|
|
|
|
|
KТР |
≈ |
U 2 |
. |
|
|
(6.11) |
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
U1 |
|
|
|
|
|
|
|
|
6.3. Работа трансформатора с нагрузкой |
|
|
|||||||||||
|
|
i1 (I1) |
|
|
|
i2 (I2) |
|
|
|
|
|
Электрическая схема транс- |
|||||
|
|
|
|
|
|
|
|
|
форматора |
с нагрузкой |
пред- |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ставлена на |
рис.6.3. |
Так |
как |
|
|
|
Е1 w |
|
|
|
|
|
|
|
Z2 |
|
|
вторичная |
обмотка |
замкнута |
||
|
|
|
|
|
|
|
|
|
|
|
|||||||
u (U |
) |
1 |
w2 |
Е2 |
|
u2(U2) |
|
|
|
|
|||||||
1 1 |
|
|
|
|
|
|
|
|
|
на нагрузку, то под действием |
|||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ЭДС вторичной обмотки проте- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Рис. 6.3. Электрическая схема |
|
|
|
|
кает ток вторичной обмотки I2, |
||||||||||||
|
|
|
|
за счет которого возникает на- |
|||||||||||||
трансформатора с нагрузкой |
|
|
|
|
|||||||||||||
|
|
|
|
магничивающая сила вторичной |
|||||||||||||
обмотки I2w2, |
|
|
|
|
|
|
|
|
|
||||||||
создающая магнитный поток вторичной обмотки Ф2. |
|||||||||||||||||
Суммарный магнитный поток (без учета магнитных потоков рассеяния первичной и вторичной обмоток), замыкаемый по магнитопроводу,
|
|
|
|
|
|
|
(6.12) |
Ф0 = Ф1 +Ф2 . |
|||||||
Увеличение тока нагрузки I2 ведет к увеличению магнитного потока вторичной обмотки. Этот поток по закону Ленца направлен противоположно магнитному потоку первичной обмотки, что приводит к
136

уменьшению ЭДС Е1, но т.к. величина приложенного к первичной обмотке напряжения U1 = E1 + I1Z1 =const, то произойдет увеличение
тока I1 на столько, на сколько его стремится уменьшить ток I2. Таким образом, магнитный поток, замыкаемый на магнитопрово-
де, остается величиной неизменной, не зависящей от нагрузки во вторичной обмотке. Вторичная обмотка U
трансформатора работает в режиме генера- 2 тора
|
|
|
|
|
|
|
|
|
(6.13) |
|
|
|
U2 = E2 − I2 Z2 , |
I2 |
|||||||||
где Z2 – полное сопротивление вторичной |
|||||||||||
обмотки трансформатора. |
|
|
|
Рис.6.4. Нагрузочная |
|||||||
Зависимость напряжения |
вторичной |
||||||||||
обмотки трансформатора от ее тока назы- |
характеристика |
||||||||||
трансформатора |
|||||||||||
вается |
нагрузочной |
характеристикой |
|||||||||
|
|||||||||||
трансформатора (рис. 6.4).
С увеличением тока нагрузки I2 уменьшается напряжение U2 (см.
рис. 6.4).
6.4. Режим опыта короткого замыкания трансформатора
Для испытания обмоток трансформатора вместо трудноосуществимого в лаборатории опыта нагрузки создают специальный режим опытного короткого замыкания (КЗ) – при очень малом напряжении и номинальных токах обмоток.
|
|
|
|
|
|
|
|
|
W |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
1 |
|
|
|
|
|
|
|
I2н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
I1н |
||||||||||||||||
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
U1н |
|
|
V |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.5. Схема опыта короткого замыкания трансформатора
В опыте КЗ вторичную обмотку замыкают накоротко (рис. 6.5), а к первичной обмотке подводят такое малое напряжение U1к, при котором токи в обмотках достигают номинальных значений. Относитель-
137
ное значение этого напряжения, называемого напряжением короткого замыкания, составляет 2 −8% от номинального:
uк % = |
U1к |
100% = 2 −8% . |
(6.14) |
|
U1н |
||||
|
|
|
Это напряжение записывается в паспорт трансформатора как его параметр и используется для определения ряда эксплуатационных характеристик.
Так как при КЗ вторичной обмотки трансформатор не передает энергию приемнику, то активная мощность Рк.н, измеренная ваттметром, представляет собой мощность электрических потерь энергии в трансформаторе. Величина Рк.н является паспортным параметром трансформатора.
6.5. Трехфазные трансформаторы
Трансформация трехфазного тока может осуществляться двумя способами:
1)при помощи трех однофазных трансформаторов;
2)при помощи трехфазного трансформатора.
Трехфазный трансформатор меньше по массе и габаритам группы из трех однофазных трансформаторов. Однако один однофазный трансформатор из трехфазной группы меньше по массе и габаритам и легче транспортируется, чем трехфазный трансформатор на полную мощность. Кроме того, при группе однофазных трансформаторов в качестве резерва достаточно иметь один запасной трансформатор (1/3 общей мощности), в то время как при одном трехфазном трансформаторе для резерва нужно иметь другой трансформатор на полную мощность.
Преимущества группы однофазных трансформаторов сказываются при больших мощностях. Наоборот, трансформаторы средней и малой мощности выполняются обычно как трехфазные (трехстержневые).
В процессе работы трансформаторы нагреваются, поэтому в трансформаторах применяется радиаторная система охлаждения: бак трансформатора заполняется минеральным маслом, которое служит для отвода тепла от нагревающихся обмоток и магнитопровода. Одновременно масло является дополнительной изоляцией между обмотками и заземленными частями трансформатора.
138
6.6. Коэффициент полезного действия трансформатора
Коэффициент полезного действия (КПД) трансформатора определяется по формуле
η = |
Р2 |
100% , |
(6.15) |
|
Р |
||||
|
|
|
||
|
1 |
|
|
где Р2 – мощность на выходе вторичной обмотки; Р1 – подводимая мощность.
Р1= Р2+Σ∆Р, |
(6.16) |
где Σ∆Р – суммарные потери мощности. Суммарные потери мощности складываются:
1) из электрических или тепловых потерь из-за наличия активного сопротивления первичной и вторичной обмоток трансформатора
( I12 R1 + I22 R2 );
2) из потерь в стали, обусловленных перемагничиванием магнитопровода.
КПД трансформатора в номинальном режиме обычно составляет от 80 до 95%.
Контрольные вопросы
1.На каком законе основан принцип действия трансформатора: 1) на законе Ома; 2) на законе электромагнитной индукции; 3) на законе Ленца?
2.С какой целью на электростанциях в начале линии электропередачи (ЛЭП) устанавливаются повышающие трансформаторы:
1) для уменьшения расхода провода на ЛЭП;
2) для повышения коэффициента мощности системы;
3) для уменьшения потерь мощности в проводах ЛЭП;
4) для уменьшения капитальных затрат на сооружение ЛЭП?
3.При каком напряжении целесообразно: а) передавать электроэнергию; б) потреблять электроэнергию:
1) а) высоком, б) низком;
2) а) низком, б) высоком;
3) это зависит от характера тока?
139
4.Какой это трансформатор:
I1=10 А |
I2=5 А |
|
|
U1=100 В |
U2=200 В |
1)понижающий, так как ток во вторичной обмотке меньше тока в первичной обмотке;
2)повышающий, так как напряжение во вторичной обмотке больше напряжения в первичной обмотке?
5.Чему равно отношение напряжений на зажимах первичной и вторичной обмоток в режиме холостого хода трансформатора:
1) отношению числа витков обмоток;
2) приближенно отношению числа витков обмоток?
6.Может ли напряжение на зажимах вторичной обмотки превы-
шать:
а) ЭДС Е1 первичной обмотки; б) ЭДС Е2 вторичной обмотки: 1) а) может, б) может; 2) а) не может, б) не может; 3) а) может, б) не может; 4) а) не может, б) может?
7.Какое уравнение связывает магнитный поток в сердечнике трансформатора с действующим значением ЭДС в обмотке трансформатора:
1)е=Еm·sinωt;
2)dФ = − Еωm sinωt dt;
3)Е=4,44fwФ;
4)другое уравнение?
8. Первичная обмотка трансформатора имеет w1=600 витков, коэффициент трансформации КТР=20. Определить число витков вторичной обмотки.
1) 30; 2) 0,03; 3) 12000; 4) 100.
140

9.Для какого режима работы трансформатора коэффициент трансформации можно определить по отношению напряжений вторичной и первичной обмоток:
1)для режима короткого замыкания;
2)для режима холостого хода;
3)для нагрузочного режима?
10.Как изменяется ток первичной обмотки трансформатора при увеличении тока вторичной обмотки:
1)остается неизменным;
2)увеличивается;
3)уменьшается?
11.Как изменяется величина магнитного потока в магнитопроводе трансформатора при увеличении нагрузки во вторичной обмотке:
1)остается неизменной;
2)увеличивается;
3)уменьшается?
12.В каких режимах работают первичная и вторичная обмотки трансформатора:
1)первичная и вторичная в режиме генератора;
2)первичная и вторичная в режиме приемника энергии;
3)первичная в режиме генератора, вторичная в режиме приемника энергии;
4)первичная в режиме приемника энергии, вторичная в режиме генератора?
13.В каком уравнении для трансформатора допущена ошибка:
|
i1(I1) |
|
i2(I2) |
|
|
|
|
|
|
u1(U1) |
w1 |
w2 |
u2(U2) |
Z2 |
|
|
|
|
1) U1 = −E1 + I1Z1 ; 2) U2 = E2 − I2Z2 ; 3) Е1=4,44f1w1Ф; 4) Е2=4,44f1w2Ф?
141

14. Для преобразования напряжения в начале и в конце ЛЭП установили трансформаторы с коэффициентом трансформации
КТР = w2 =26. Во сколько раз уменьшатся потери в проводах ЛЭП, w1
если передаваемая мощность и сечение проводов остались такими же, как до установки трансформаторов:
1) 676; 2) 52; 3) 13; 4) 10?
15. Какие уравнения соответствуют работе однофазного трансформатора с нагрузкой:
1)U1 = E1 − I1Z1 , U2 = E2 + I2 Z2 ;
2)U1 = E1 + I1Z1 , U2 = E2 − I2 Z2 ;
3)U1 = E1 − I1Z1 , U2 = E2 − I2 Z2 ;
4)U1 = E1 + I1Z1 , U2 = E2 + I2 Z2 ?
16.Как изменится магнитный поток в сердечнике трансформатора при возрастании тока во вторичной обмотке в три раза:
1) увеличится в три раза;
2) уменьшится в три раза;
3) останется неизменным?
17.Число витков в каждой фазе первичной обмотки трехфазного
трансформатора w1=1000, в каждой фазе вторичной обмотки w2=200. Линейное напряжение питающей сети равно 1000 В. Определить линейное напряжение на выходе трансформатора при условии, что первичная и вторичная обмотки соединены по схеме «звезда».
1)200 В; 2) 5000 В; 3) для решения задачи недостаточно данных.
18.Как соединены эти обмотки трансформатора:
A
B
C 1) «звездой»;
2) «треугольником»;
3) другим способом?
142

19. Как соединены эти обмотки трансформатора:
A B C
1)«звездой»;
2)«треугольником»;
3)другим способом?
20.В трансформаторе, понижающем напряжение с 220 до 6,3 В, применены проводники сечением S1=1 мм2 и S2=9 мм2. Обмотке выс-
шего или низшего напряжения принадлежит провод сечением S1=1 мм2:
1)обмотке высшего напряжения;
2)обмотке низшего напряжения?
21.Первичную обмотку однофазного трансформатора уменьшили на несколько витков. Как изменится при этом напряжение на выводах вторичной обмотки, если первичная обмотка включена под номинальное напряжение:
1) увеличится; 2) уменьшится; 3) не изменится?
22.Как изменится наводимая во вторичной обмотке трансформатора ЭДС при замене ферромагнитного сердечника на медный:
1) увеличится; 2) уменьшится; 3) не изменится?
23.Чему равен КПД трансформатора, если общие потери составляют 11% от мощности, потребляемой нагрузкой:
1) 80%; 2) 85%; 3) 90%; 4) 95% ?
24.Однофазный трансформатор с номинальной мощностью
Sном=1600 кВА включен в сеть переменного тока с напряжением U=10000 В. При холостом ходе трансформатора напряжение на зажи-
мах вторичной обмотки U2=400 В. Определить число витков первичной обмотки, если число витков вторичной обмотки w2=32.
1) 200; 2) 400; 3) 800; 4) 2000.
143

7. АСИНХРОННЫЕ ДВИГАТЕЛИ
7.1. Основные понятия
Асинхронные машины относятся к классу электрических машин переменного тока. Мощность асинхронных машин может быть от долей ватта до нескольких тысяч киловатт.
Асинхронные машины обратимы, то есть они могут работать в режиме двигателя и в режиме генератора. В режиме двигателя рабочие характеристики и эксплуатационные свойства асинхронной машины лучше, чем в режиме генератора. Поэтому асинхронные машины практически всегда используются в качестве двигателей. Асинхронные двигатели отличаются высокой надежностью в работе, простотой конструкции и простотой в эксплуатации.
7.2. Устройство трехфазного асинхронного двигателя
Асинхронный двигатель (рис. 7.1) состоит из двух основных частей: статора и ротора.
Статор – это неподвижная часть машины, которая состоит из станины с сердечником и трехфазной обмотки. Сердечник выполнен из листов электротехнической стали. Фазы трехфазной обмотки уложены в пазах сердечника, расположенных в пространстве
относительно друг друга под углом 120º. Начала и концы фаз обмоток выведены на зажимы клеммной коробки (рис. 7.2), расположенной на корпусе машины. В зависимости от того, на какое напряжение рассчитана статорная обмотка, она соединяется по схеме «звезда» или по схеме «треугольник» (см. рис. 7.2).
Ротор – это вращающаяся часть машины. Ротор состоит из вала с сердечником и обмотки. Сердечник выполнен из листов электротехнической стали и имеет цилиндрическую форму.
Ротор асинхронного двигателя может быть короткозамкнутым или фазным.
Большинство применяемых двигателей имеют короткозамкнутый ротор (рис. 7.3, а). Такие двигатели значительно дешевле, а их обслуживание значительно проще.
144

А |
В С |
А |
В С |
|
|
|
С |
С2 |
С |
С1 |
С2 |
С3 |
|
|
|
|
1 |
3 |
|
|
|
||
С1 |
С2 |
С3 |
С6 |
С4 |
С5 |
С6 |
С4 |
С5 |
|
С6 |
С4 |
С5 |
|||||||
|
Y |
|
|
∆ |
|
||||
|
|
|
|
|
|
|
а |
б |
в |
|
|
|
Рис. 7.2. Схема подключения фаз обмоток статора к клеммной коробке (а); соединение выводов фаз обмоток по схеме «звезда» (б)
и по схеме «треугольник» (в): С1, С2, С3 – начала фаз обмоток; С4, С5, С6 – концы фаз обмоток
Обмотка короткозамкнутого ротора выполняется в виде медных или алюминиевых стержней, уложенных в пазы сердечника. По торцам стержни замкнуты между собой накоротко (рис. 7.3, б). За свой внешний вид короткозамкнутую обмотку называют «беличьим колесом» или «беличьей клеткой».
а |
б |
|
|
Рис. 7.3. Общий вид короткозамкнутого ротора (а) и короткозамкнутой обмотки типа «беличье колесо» (б)
Фазный ротор (рис. 7.4, а) имеет трехфазную обмотку, соединенную по схеме «звезда» (реже «треугольник»). Концы фазной обмотки ротора присоединены к трем медным кольцам, укрепленным на валу ротора и изолированным как между собой, так и от стального сердечника ротора, вследствие чего этот двигатель получил также название двигателя с контактными кольцами.
145

Три кольца жестко насажены на вал ротора через изоляционные прокладки. На кольца накладываются щетки, которые размещены в щеткодержателях, укрепленных на одной из подшипниковых крышек (рис. 7.4, б). Через щетки и кольца обмотка ротора подключена к клеммной коробке. К выводам такой обмотки обычно подключаются добавочные сопротивления Rд в виде трехфазного реостата (рис. 7.5).
1 |
2 |
|
3 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6
4
4 3 5 7
а |
б |
|
Рис. 7.4. Общий вид фазного ротора (а) и асинхронной машины с фазным ротором в разрезе (б): 1 – станина; 2 – сердечник статора;
3 – сердечник ротора; 4 – обмотка ротора; 5 – контактные кольца; 6 – щетки; 7 – клеммная коробка
А |
|
Rд |
|
|
|
В |
|
|
С |
|
|
Обмотка |
Обмотка |
Добавочные |
статора |
фазного |
сопротивления |
ротора |
||
|
а |
б |
Рис. 7.5. Электрическая схема (а) и общий вид (б) трехфазного асинхронного двигателя с фазным ротором с подключенными к его обмотке добавочными сопротивлениями через щеточный контакт с контактными кольцами
Включение реостата в цепь ротора дает возможность существенно улучшить условия пуска двигателя: уменьшить пусковой ток и
146

увеличить пусковой момент. Кроме этого, реостатом, включенным в цепь ротора, можно плавно регулировать частоту вращения двигателя.
7.3. Вращающееся магнитное поле статора асинхронного двигателя
Принцип работы асинхронного двигателя основан на получении вращающегося магнитного поля. При поданном на обмотку статора трехфазном напряжении в фазах обмотки протекают токи:
iA = Imsinωt; |
|
|
|
|
(7.1) |
iB = Imsin(ωt −120°); |
||
|
|
|
iC = Imsin(ωt −240°). |
|
|
i
iA |
iB |
iC |
|
|
ωt1 |
ωt2 |
ωt3 |
ωt4 |
ωt |
|
А |
Z |
N |
А |
Z |
|
Y |
|
Y |
|
|
||
S |
|
N |
|
|
|
|
C |
X |
B |
C |
|
B |
|
|
А |
S |
X S |
|
А |
|
|
|
|
||||
|
|
Y |
Z |
|
Y |
Z |
|
|
|
|
S |
|
N |
|
|
C |
B |
|
C |
B |
|
|
N X |
|
|
|
X |
Рис. 7.6. График трехфазной системы токов и упрощенные картины результирующего магнитного поля для четырех моментов времени:
A, B, C – начала фаз обмотки статора; X, Y, Z – концы фаз обмотки статора
147

Ток в каждой фазе создает свое переменное магнитное поле. Эти поля складываются и образуют результирующее магнитное поле. Картина результирующего магнитного поля непрерывно изменяется, но ее можно изобразить для любого момента времени (рис. 7.6). За положительное направление токов принимается направление от начала к концу фазы обмотки статора.
На рис. 7.6 стрелка указывает направление оси полюсов магнитного поля. Из рисунка видно, что при изменении токов происходит равномерное вращение всего спектра силовых линий магнитного поля, а конфигурация силовых линий при этом не изменяется. Такое поле принято называть вращающимся. Частота вращения магнитного поля
n |
= |
60 f1 |
, |
(7.2) |
|
||||
1 |
|
p |
|
|
|
|
|
||
где f1 – частота тока в обмотке статора (частота питающего напряжения); р – число пар полюсов.
Число пар полюсов основного магнитного поля асинхронного двигателя определяется количеством катушек в каждой фазе и способом соединения этих катушек между собой (рис. 7.7).
|
N |
N |
|
|
i |
i |
|
~u |
S |
||
S |
|||
|
N |
S |
|
|
p=2 |
p=1 |
Рис. 7.7. Зависимость числа пар полюсов от схемы соединения катушек в каждой фазе обмотки статора
При последовательном соединении двух катушек каждой обмотки статора число пар полюсов р=2; частота вращения магнитного поля при частоте питающего напряжения f1=50 Гц в соответствии с
формулой (7.2) n = |
60 f1 |
= |
60 50 |
=1500 |
об |
. При параллельном со- |
|
|
|
||||
1 |
p |
2 |
|
мин |
||
|
|
|||||
единении двух катушек каждой фазы обмотки статора число пар по-
люсов р=1; n1=3000 миноб .
148
Если две фазы подводимого к статору напряжения поменять местами, т.е. изменить порядок чередования токов в обмотках статора на обратный, результирующее магнитное поле будет вращаться в обратном направлении.
7.4. Принцип действия асинхронного двигателя
При включении двигателя в трехфазную сеть в статоре образуется вращающееся магнитное поле, силовые линии которого пересекают обмотки статора и ротора. При этом согласно закону электромагнитной индукции в каждой фазе обмоток статора и ротора наводятся ЭДС:
Е1=4,44·w1· k1·f1·Ф; |
(7.3) |
Е2=4,44·w2· k2·f2·Ф, |
(7.4) |
где w1 и w2 – число витков в фазах обмоток статора и ротора; k1 и k2 – обмоточные коэффициенты статора и ротора, указывающие степень использования магнитного потока Ф в обмотках статора и ротора.
Так как цепь ротора замкнута, то в обмотке ротора под действием ЭДС Е2 протекает ток I2. Взаимодействие тока ротора с магнитным полем машины приводит к возникновению вращающего электромаг-
нитного момента |
|
М=С·Ф·I2·cosφ2, |
(7.5) |
где С – постоянный коэффициент, зависящий от конструкции двигателя; cosφ2 – коэффициент мощности цепи ротора; I2·cosφ2 – активная составляющая тока ротора.
Ротор вращается в том же направлении, что и магнитное поле статора. Частота вращения ротора асинхронной машины, работающей в режиме двигателя, всегда меньше частоты вращения магнитного поля статора, так как только в этом случае будет иметь место изменение магнитного потока, пересекающего обмотку ротора.
Мерой отставания частоты вращения ротора n2 от частоты вра-
щения магнитного поля n1 является скольжение |
|
||
S = |
n1 − n2 |
. |
(7.6) |
|
|||
|
n |
|
|
1 |
|
|
|
При неподвижном роторе (n2=0) S=1.
Таким образом, в момент пуска двигателя S=1.
Если ротор двигателя вращается с такой же частотой, что и магнитное поле статора (n2= n1), то S=0. Такой режим называется режимом идеального холостого хода.
149
Номинальное значение частоты вращения ротора n2н, соответствующее расчетным значениям нагрузки, частоты и напряжения сети, указывается заводом-изготовителем на корпусе двигателя.
Для различных двигателей в номинальном режиме Sн=0,02–0,08. От величины скольжения зависит частота тока в обмотке ротора
f2=S·f1, |
(7.7) |
а также ЭДС Е2, наводимая в каждой фазе обмотки ротора, |
|
Е2=Е2к·S, |
(7.8) |
где Е2к – ЭДС при неподвижном роторе (является параметром двигателя).
Таким образом, ЭДС, наводимая в обмотке ротора вращающимся магнитным полем, прямо пропорциональна величине скольжения.
7.5. Механические характеристики асинхронного двигателя
Эксплуатационные параметры асинхронного двигателя наглядно иллюстрируются механическими характеристиками.
Механические характеристики М=f(S) и n2=f(M) могут быть рассчитаны и построены в соответствии с уравнением
|
|
3U12Ф |
R2′ |
|
|
|
||
M = |
|
S |
, |
(7.9) |
||||
|
|
|
||||||
Ω0 [( R1 + |
R2′ |
)2 |
+( X1 + X 2′ )2 |
|||||
|
|
|
||||||
S |
|
|
||||||
|
|
|
|
|
|
|
||
где М – вращающий момент; U1Ф – фазное напряжение статорной обмотки; S – скольжение; R1, X1 – значения активного и индуктивного сопротивлений статорной обмотки; R2′, X 2′ – приведенные значения
активного и индуктивного сопротивлений роторной обмотки; f1 – частота напряжения питания статорной обмотки; р – число пар полюсов;
Ω0 = 2πpf1 – угловая скорость вращения магнитного поля.
По зависимости М=f(S) легко построить характеристику n2=f(M). Для построения механической характеристики по уравнению (7.9) необходимо произвести расчет параметров электрической цепи обмоток статора и ротора. Для расчета эти данные можно найти лишь
вполных каталогах асинхронных машин.
Вэксплуатационных условиях для расчета и построения механических характеристик по паспортным данным пользуются упрощенной формулой
150

М |
= |
|
2М |
кр |
|
, |
(7.10) |
||
|
|
|
|
|
|
||||
|
S |
+ |
|
Sкр |
|
||||
|
|
|
|
|
|
|
|||
|
|
|
Sкр |
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
||
где Мкр – критический (максимальный) вращающий момент, который может развивать двигатель; Sкр – скольжение, соответствующее критическому моменту.
Мкр=λ·Мн, |
(7.11) |
где λ – коэффициент перегрузки по моменту; Мн – номинальный момент двигателя.
Мн = |
9550Р2н |
[Н м] , |
(7.12) |
|
|||
|
n2н |
|
|
где Р2н – номинальная мощность двигателя на валу, кВт; n2н – номи- |
|||
нальная частота вращения ротора, |
об |
. |
|
|
|
||
|
мин |
|
|
Скольжение, соответствующее критическому моменту, |
|
||
Sкр = Sн( λ + λ2 −1 ). |
(7.13) |
||
Зная Мкр и Sкр и задаваясь значениями скольжения S в пределах от 0 до 1, по уравнению (7.10) рассчитывают и строят механическую характеристику двигателя М=f(S).
S=0, n1 1 2
Sн, n2н
3
Sкр, n2кр
S=1,0 |
|
4 |
|
|
Мн |
Мп |
Мкр |
||
|
Рис. 7.8. Механическая характеристика асинхронного двигателя
Механическую характеристику n2=f(M) (рис. 7.8) можно получить из характеристики М=f(S), учитывая, что
151

n2=n1(1–S), |
(7.14) |
где n1 – частота вращения магнитного поля.
На графике механической характеристики (см. рис. 7.8) можно выделить четыре основные точки: 1) S=0, n2=n1, M=0; 2) S=Sн, n2=n2н,
M=Mн; 3) S=Sкр, n2=n2кр, M=Mкр; 4) S=1, n2=0, M=Mп (Mп – пусковой момент).
Точка 1 соответствует режиму идеального холостого хода, когда отсутствует момент сопротивления на валу двигателя, возникающий за счет полезной нагрузки, трения в подшипниках, сопротивления воздуха.
Точка 2 соответствует номинальному режиму работы двигателя. Точка 3 соответствует критическому режиму, когда двигатель развивает максимально возможный момент. При увеличении момента нагрузки двигатель выходит из рабочего режима и останавливается.
Точка 4 соответствует пусковому режиму двигателя. Ток ротора по закону Ома определяется выражением
I2 |
= |
E2 |
, |
(7.15) |
||
R22 |
+ X 22 |
|||||
|
|
|
|
|||
где Е2 – ЭДС ротора; R2 и Х2 – соответственно активное и индуктивное сопротивления обмотки ротора.
Х2, как и Е2, достигает наибольшего значения Х2к в момент пуска при S=1, т.е.
Х2=S·Х2к. |
(7.16) |
С учетом уравнений (7.8) и (7.16) выражение (7.15) примет вид
I2 |
= |
E2 |
= |
|
S E2к |
= |
E2к |
, |
(7.17) |
|||
R22 |
+ X 22 |
R22 |
+ S 2 |
X 22к |
R22 |
|
||||||
|
|
|
|
+ X 22к |
|
|
||||||
|
|
|
|
|
S 2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
где Х2к – приведенное индуктивное сопротивление ротора.
Из уравнения (7.17) видно, что ток I2 достигает наибольшего значения при S=1, т.е. в момент пуска двигателя.
Линейный участок механической характеристики, на котором n2кр<n2<n1, является рабочим (см. рис. 7.8). Участок механической характеристики, на котором 0<n2<n2кр, характеризует изменение вращающего момента и частоты вращения ротора при пуске двигателя.
Механическая характеристика асинхронного двигателя при отсутствии добавочных сопротивлений в цепи ротора называется есте-
ственной.
152

При введении в цепь фазного ротора добавочных сопротивлений механические характеристики будут искусственными (рис. 7.9).
Для искусственных механических характеристик уравнение (7.10) примет вид
М = |
|
2Мкр |
|
, |
(7.18) |
||
|
S |
+ |
Sкр.и |
|
|||
|
|
Sкр.и |
S |
|
|
|
|
|
|
|
|
|
|
||
где Sкр.и – критическое скольжение на искусственной характеристике.
Sкр.и = Sкр |
R2 + Rд |
, |
(7.19) |
|
|||
|
R2 |
|
|
где Sкр – критическое скольжение на естественной характеристике; R2 – активное сопротивление фазы обмотки ротора; Rд – добавочное сопротивление в цепи фазы обмотки ротора.
n2, S
(S=0) n1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||
n2н |
|
|
|
|
|
||
n’2н |
|
|
|
|
|
|
|
n”2н |
|
2 |
|
R2 |
|||
Sкр |
|
3 |
|
|
|||
|
|
|
|
||||
S’кр |
|
|
R2+Rд1 |
||||
|
|
|
|
|
|||
|
|
|
|
|
R2+Rд2 |
||
S”кр |
|
|
|
|
|
||
|
|
|
|
|
|
||
S=1 |
|
|
|
|
|
М |
|
Mн |
Мп М’п М”п |
Мкр |
|||||
|
|||||||
Рис. 7.9. Естественная (1) и искусственные (2, 3) механические характеристики асинхронного двигателя (Rд2>Rд1)
Как видно из уравнения (7.19), с введением добавочного сопротивления возрастает Sкр.
Добавочное сопротивление в цепи ротора в соответствии с законом Ома уменьшает ток ротора I2. Но, так как, согласно уравнению (7.16), индуктивное сопротивление ротора Х2 в момент пуска (S=1) имеет наибольшее значение (cosφ2 очень мал), введение добавочного
153

(активного) сопротивления в цепь ротора приводит к значительному увеличению cosφ2 и, следовательно, согласно выражению (7.5), к увеличению пускового момента.
n2, I
n2
Iп
I
Iн
t
Рис. 7.10. Графики изменения тока и частоты вращения ротора при пуске асинхронного двигателя
Таким образом, при введении в цепь ротора добавочных сопротивлений уменьшается частота вращения ротора, увеличиваются скольжение и пусковой момент (см. рис. 7.9).
Асинхронные двигатели имеют небольшой пусковой момент по сравнению с двигателями постоянного тока. Для увеличения пускового момента асинхронного двигателя в цепь ротора включают добавочные пусковые сопротивления, которые по мере увеличения частоты вращения выводят из цепи ротора.
При пуске ток двигателя составляет Iп=(5–7)Iн, по мере увеличения частоты вращения ток уменьшается (рис. 7.10).
К3 К2 К1
АК
В
С
Rд
Рис. 7.11. Схема асинхронного двигателя с фазным ротором при введенных в цепь ротора пусковых сопротивлениях
154

При пуске двигателя за счет введения добавочных (пусковых) сопротивлений в цепь фазного ротора (рис. 7.11) снижается величина пускового тока до заданной кратности.
По мере разбега путем последовательного выведения ступеней пускового сопротивления (замыканием контактов К1, К2, К3) достигается номинальная частота вращения двигателя.
7.6. Свойство саморегулирования вращающего момента асинхронного двигателя
Работе двигателя в номинальном режиме соответствуют номинальные параметры: вращающий момент Мн, скольжение Sн и частота вращения n2н (рис. 7.12).
При увеличении нагрузки на валу двигателя частота вращения ротора n2 уменьшается, следовательно, скольжение S, согласно формуле (7.6), возрастет.
Увеличение скольжения, согласно формуле (7.8), приведет к увеличению ЭДС ротора Е2, вследствие чего увеличится и ток ротора I2. В соответствии с уравнением (7.5) М=С·Ф·I2·cosφ2. Поэтому увеличение тока ротора приведет к увеличению вращающего момента, который в установившемся режиме уравновешивает момент нагрузки на валу.
n2 |
|
|
n1 |
1 |
|
n2н |
||
2 |
||
n’2 |
|
М
Мн М’ Мп |
Мкр |
Рис. 7.12. Увеличение вращающего момента при возрастании нагрузки на валу двигателя
155

Таким образом, на увеличение момента нагрузки двигатель ответит увеличением вращающего момента при меньшей частоте вращения ротора. При этом установится новое состояние равновесия. Рабочая точка на механической характеристике переместится из положения 1 в положение 2 (см. рис. 7.12), которому соответствуют вращающий момент М’>Мн, скольжение S’>Sн и частота вращения n’2<n2н.
7.7. Регулирование частоты вращения асинхронных двигателей
Один из способов регулирования частоты вращения асинхронных двигателей – введение добавочных сопротивлений в цепь фазного ро-
тора. Частота вращения ротора при этом уменьшается (рис. 7.13). Регулировочными сопротивлениями могут быть пусковые сопротивле-
ния (см. рис. 7.11).
n2 |
|
|
|
n1 |
а |
|
|
n2н |
|
||
б |
|
||
n’2н |
|
||
n”2н |
в |
R2 |
|
n’’’2н |
г |
||
|
R2+Rд1
R2+Rд2
 +R2+Rд3
+R2+Rд3
М
Mн Mкр
Рис. 7.13. Механические характеристики при регулировании частоты вращения введением в цепь ротора регулировочных сопротивлений (Rд3>Rд2>Rд1)
Этот способ имеет недостатки:
1)значительные потери мощности в добавочных сопротивлениях;
2)с введением добавочных сопротивлений уменьшается жесткость механической характеристики;
156

3)процесс регулирования осуществляется только в сторону уменьшения частоты вращения от номинального значения;
4)процесс регулирования ступенчатый.
Этот метод может применяться только для асинхронных двигателей с фазным ротором.
Другой способ регулирования частоты вращения заключается в изменении числа пар полюсов, что в соответствии с формулой (7.2)
n1 = 60pf1 приводит к изменению частоты вращения магнитного поля
и, следовательно, к изменению частоты вращения ротора. Изменение числа пар полюсов осуществляется изменением схемы соединения секций фаз обмотки статора.
Этот способ обычно применяется для многоскоростных двигателей специального назначения с короткозамкнутым ротором. Многоскоростными называются асинхронные двигатели с короткозамкнутым ротором, допускающие пересоединение катушек в каждой фазе обмотки статора.
Промышленностью выпускаются двухскоростные, трехскорост-
ные асинхронные двигатели: 750/1500, 500/1000, 750/1500/3000
об/мин.
У таких двигателей процесс регулирования осуществляется ступенчато без снижения жесткости механической характеристики (рис. 7.14).  n2
n2
n01 а
р
n02
б 2р
М
Mкр |
Mкр |
Рис. 7.14. Механические характеристики двухскоростного асинхронного двигателя (стрелками показан переход двигателя из режима работы в точке а в режим работы в точке б при увеличении числа пар полюсов р в два раза)
157

Недостатки данного способа регулирования:
1)процесс регулирования ступенчатый;
2)при одних и тех же габаритах большей частоте вращения соответствует большая номинальная мощность; при снижении частоты вращения значительно снижаются номинальная мощность двигателя
иего технические показатели (ηн, cosφн).
Регулирование частоты вращения асинхронного двигателя воз-
можно и изменением частоты питающего напряжения f1.
При этом также в соответствии с формулой (7.2) изменяется частота вращения магнитного поля.
При уменьшении f1 (частоты тока I1) магнитный поток возрастает, токи в обмотке увеличиваются, а КПД и cоsφ1 снижаются. Для сохранения неизменной величины магнитного потока при частотном регулировании осуществляется одновременное пропорциональное изменение как частоты тока I1, так и амплитуды фазных напряжений (рис. 7.15). При этом Мкр двигателя остается почти неизменным, незначительно снижаясь с уменьшением f1 (см. рис. 7.15).
n2 |
|
|
n1 |
а |
f1н |
n’1 |
б |
f’1<f1н |
n”1 |
в |
f”1<f’1н |
|
М
Mн |
Mкр |
Рис. 7.15. Механические характеристики при изменении частоты тока в цепи статора
В настоящее время для частотного регулирования используются специальные статические преобразователи частоты на тиристорах, позволяющие плавно регулировать частоту вращения асинхронных двигателей в широких пределах.
158

7.8. Коэффициент полезного действия асинхронного двигателя
Коэффициент полезного действия (КПД) асинхронного двигателя показывает, какую часть составляет полезная мощность на валу двигателя от мощности, потребляемой двигателем из сети.
η = |
Р2 |
100% , |
(7.20) |
|
Р |
||||
|
|
|
||
|
1 |
|
|
где Р1 – активная мощность, потребляемая двигателем из сети; Р2 – активная полезная мощность на валу двигателя, которая отдается производственному механизму.
Активная мощность Р1 определяет среднюю мощность необратимого преобразования в двигателе электрической энергии, получаемой из трехфазной сети, в механическую, тепловую и другие виды энергии.
|
|
Р1 = |
3 U1I1cosϕ1. |
|
(7.21) |
||
|
f1 |
|
n1 |
|
n2 |
|
|
Трехфазная |
|
|
Производственный |
|
|||
Статор |
Ротор |
|
|||||
сеть |
|
|
|
механизм |
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р1 = |
3 U1I1 cosϕ1 |
Р2 |
|
||
|
∆РЭ1 ∆РC1 |
∆РЭ2 ∆РC2 ∆РМЕХ |
Рис. 7.16. Схема связей между частями машинного устройства и диаграмма мощностей асинхронного двигателя
Суммарные потери мощности в двигателе при преобразовании электрической энергии в полезную механическую
∑∆Р=Р1–Р2. (7.22)
На диаграмме (рис. 7.16) показаны потери мощности в двигате-
ле:
∆РЭ1, ∆РЭ2 – электрические потери, вызванные нагревом проводов обмоток статора и ротора; эти потери переменные, так как их величина зависит от нагрузки на валу двигателя и пропорциональна
квадрату тока обмоток статора и ротора: |
|
∆РЭ1≈7,5%·Р1; ∆РЭ2≈4,5%·Р1; |
(7.23) |
159 |
|
∆РС1, ∆РС2 – потери в стали машины, т.е. потери, обусловленные перемагничиванием сердечников статора и ротора, причем потери ∆РС2 в сердечнике ротора очень малы и практически не учитываются; потери в сердечнике статора
∆РС1≈1,5%·Р1; (7.24)
∆РМЕХ – механические потери, обусловленные трением ротора в подшипниках, и вентиляционные потери:
∆РМЕХ≈(2–4)%·Р1. (7.25)
η
ηн
Р2
Р2н
Рис. 7.17. Зависимость коэффициента полезного действия асинхронного двигателя от нагрузки на валу
Наибольшее значение КПД достигает при номинальной нагрузке
(рис. 7.17).
КПД современных трехфазных асинхронных двигателей в номинальном режиме составляет 80–95%.
7.9. Коэффициент мощности асинхронного двигателя
Кроме необратимого процесса расхода энергии, учитываемого величиной активной мощности Р1, в асинхронном двигателе происходит обратимый процесс периодического изменения запаса энергии магнитного поля.
Коэффициент мощности асинхронного двигателя
cosϕ1 |
= |
P1 |
(7.26) |
||
P2 |
+Q2 |
||||
|
|
|
|||
|
|
1 |
1 |
|
|
зависит от нагрузки на валу двигателя.
160

В режиме холостого хода энергия расходуется в основном только на покрытие небольших потерь мощности в статоре и незначительных механических потерь. Энергия, запасенная во вращающемся магнитном поле, практически не зависит от расхода энергии на совершение полезной механической работы и нагрев двигателя, т.е. реактивная мощность не зависит от нагрузки на валу. Таким образом, в режиме холостого хода двигателя активная мощность мала, а реактивная велика, поэтому
cosφ1ХХ=0,08–0,15. (7.27) |
cosφ |
|
|
С увеличением нагрузки |
|
||
cosφ1н |
|
||
на валу двигателя активная |
|
||
|
|
||
мощность растет, а реактив- |
|
|
|
ная остается |
постоянной. |
|
Р2 |
Следовательно, |
коэффици- cosφ1ХХ |
||
ент мощности увеличивается. При номинальной нагрузке
cosφ1н=0,75–0,95. (7.28)
Однако при дальнейшем увеличении тормозного момента на валу происходит существенный рост токов в обмотках статора и ротора, что приводит к возрастанию реактивной мощности и, как следствие, к снижению коэффициента мощности (рис. 7.18).
7.10. Генераторные и тормозные режимы работы асинхронного двигателя
7.10.1. Генераторный режим с отдачей энергии в сеть
При генераторном (рекуперативном) режиме с отдачей энергии в сеть ротор двигателя вращается с частотой, большей синхронной (n2>n1) в направлении вращения магнитного поля статора, т.е. S<0 (рис. 7.19).
Следовательно, направление, в котором силовые линии магнитного поля пересекают обмотку ротора, противоположно по сравнению с направлением, когда асинхронная машина работает в режиме двигателя. При этом ЭДС Е2 и ток I2 в обмотке ротора изменяют фазу на 180º, что согласно уравнению (7.5) вызывает изменение направления действия вращающего момента, который оказывается направленным против вращения ротора.
161

n2 (S) |
|
|
S=0 |
Генераторный |
|
режим |
Двигательный |
(S<0) |
режим |
|
(0<S<1) |
М
S=1 Mкр
Рис. 7.19. Механическая характеристика асинхронного двигателя в режиме рекуперации энергии в сеть
Изменение направления действия вращающего момента, фазы тока ротора I2 на 180º, а следовательно, и фазы активной составляющей тока статора I1 на 180º означает переход машины в режим генератора, когда механическая энергия, поступающая извне на вал ротора, преобразуется в электрическую и отдается в сеть. Однако при этом асинхронная машина потребляет из сети реактивную энергию, так как вращающееся магнитное поле машины создается реактивной (индуктивной) составляющей тока I1. Это приводит к уменьшению коэффициента мощности машины, что является недостатком такого режима.
Такой режим имеет место при работе двигателя в грузоподъемных механизмах при спуске легких грузов или при переключении числа пар полюсов многоскоростного двигателя с большей частоты вращения на меньшую. При этом частота вращения ротора не может
измениться мгновенно. Например, при переключении с n1=1500 миноб
на n1=750 миноб ротор некоторое время будет вращаться с частотой
n2>n1=750 миноб .
В этом режиме скольжение и электромагнитный момент будут отрицательными, т.е. электромагнитный момент становится тормозным, а вращение ротора происходит за счет сторонних сил.
162

7.10.2.Режим торможения противовключением
Врежиме торможения противовключением ротор вращается в сторону, противоположную вращению магнитного поля статора. В этом режиме S>1.
n2 (S)
n1 |
S=0 |
Двигательный режим |
|
Rд1
S=1 |
М |
Режим Rд2 противовключения
S>1
Rд3
Рис. 7.20. Механические характеристики асинхронного двигателя в режиме противовключения (Rд3>Rд2>Rд1)
Режим противовключения может возникнуть у двигателя, работающего в грузоподъемных механизмах, при спуске тяжелых грузов. При этом двигатель включен на подъем, но под действием веса груза ротор двигателя вращается в обратную сторону. Этот режим называется режимом электромагнитного тормоза (рис. 7.20).
В режиме противовключения S>1, следовательно (так как Е2=Е2к·S), ЭДС, наводимая в роторе, увеличивается по отношению к двигательному режиму. При этом в цепь ротора вводят добавочные сопротивления, уменьшающие ток ротора.
7.11. Пример расчета режима работы трехфазного асинхронного двигателя
Номинальная мощность трехфазного асинхронного двигателя с короткозамкнутым ротором Р2н=10 кВт; номинальное напряжение
163

Uн=380 В; номинальная частота вращения ротора n2н=1420 миноб ; но-
минальный коэффициент полезного действия ηн=0,84; номинальный коэффициент мощности cosϕн = 0,85 ; кратность пускового тока
In = 6,5 ; перегрузочная способность двигателя по моменту λ=1,8.
Iн
Определить: мощность, подводимую к двигателю Р1н; номинальный Мн и максимальный Мкр моменты двигателя; пусковой ток двигателя Iп; номинальное Sн и критическое Sкр скольжение. Рассчитать и построить механическую характеристику двигателя n2 = f (М).
Решение. |
|
|
|
|
|
|
|
|
||
1. |
Мощность, подводимая к двигателю, |
|||||||||
|
Р |
= |
Р2н |
|
= |
10 |
=11,9 кВт. |
|||
|
ηн |
0,84 |
||||||||
|
|
1н |
|
|
|
|
||||
2. |
Номинальный момент двигателя |
|
||||||||
|
Мн = |
9550 Р2н |
= |
|
9550 10 |
= 67,3 Н м. |
||||
|
|
1420 |
||||||||
|
|
|
n2н |
|
|
|||||
3.Максимальный (критический) момент
Мкр = λ Мн =1,8 67,3 =121 Н м.
4.Номинальный ток
|
I1н = |
|
Р1н |
= |
11,9 1000 |
= 21,2 А. |
|||
|
|
|
|
1,73 380 0,84 |
|||||
|
3U1н сosϕ1н |
|
|
|
|||||
5. |
Пусковой ток двигателя |
|
|
|
|
|
|||
|
Iп |
|
= 6,5 I1н |
= 6,5 21,2 =138 А. |
|||||
6. |
Номинальное скольжение |
|
|
|
|||||
|
Sн = |
n1н − n2н |
|
= |
1500 −1420 |
= 0,053. |
|||
|
n1н |
|
|||||||
|
|
|
|
|
1500 |
|
|
||
7. |
Критическое скольжение |
|
1,82 −1)= 0,175. |
||||||
|
Sкр = Sн (λ + λ2 −1)= 0,053(1,8 + |
||||||||
8. |
Рассчитаем и построим механические характеристики двигате- |
||||||||
ля М=f(S) и n2 = f (М) |
(рис. 7.21). |
|
|
|
|||||
Задаваясь скольжением S от 0 до 1, рассчитаем вращающий момент и частоту вращения двигателя в соответствии с уравнениями:
164
М = |
|
2М |
кр |
= |
|
|
242 |
|
; |
|||||
|
Sкр |
|
+ |
|
S |
|
0,175 |
+ |
S |
|
||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
S |
|
0,175 |
|
|||
|
|
S |
|
|
Sкр |
|
|
|
|
|||||
|
|
|
n2 = n1 (1 − S ). |
|
|
|
||||||||
Расчетные данные для построения механических характеристик асинхронного двигателя приведены в табл. 7.1.
Таблица 7.1
Расчетные данные для построения механических характеристик асинхронного двигателя
S |
n2, |
М, |
|
об/мин |
Н·м |
||
|
|||
0 |
1500 |
0 |
|
0,053 |
1420 |
67,3 |
|
0,1 |
1350 |
104,3 |
|
0,175 |
1238 |
121,0 |
|
0,2 |
1200 |
120,5 |
|
0,3 |
1050 |
105,3 |
|
0,4 |
900 |
88,8 |
|
0,5 |
750 |
75,5 |
|
0,6 |
600 |
65,2 |
|
0,7 |
450 |
57,0 |
|
0,8 |
300 |
50,5 |
|
0,9 |
150 |
45,5 |
|
1,0 |
0 |
41,2 |
|
|
|
|
165

М, Н·м
120
110
100
90
80
70
60
50
40
30
20
10
0
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n2, |
об |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мин |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1500 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1400 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1300 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
M=f(S) |
|
|
|
|
|
|
1200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1000 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
900 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
800 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
700 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
600 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n2=f(M) |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
500 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
400 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
300 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М, Н·м |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,2 |
0,4 |
0,6 |
0,8 |
|
1,0 |
|
|
|
|
|
|
|
|
|
|
|
20 |
40 |
60 |
|
80 |
100 |
120 |
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 7.21. Механические характеристики асинхронного двигателя
Контрольные вопросы
1.Асинхронным двигатель называется потому, что:
1)поле статора опережает при своем вращении ротор;
2)поле статора отстает от поля ротора;
3)поле статора и поле ротора совпадают;
4)поле статора находится в противофазе с полем ротора.
2.Каким образом следует соединить обмотку статора асинхронного трехфазного двигателя при его подключении к сети, если в его паспорте указано напряжение 220 В, а напряжение сети 220/380 В:
1)на данное напряжение включить нельзя;
2)«треугольником»;
3)«звездой»;
4)безразлично, по какой схеме?
3.Каким способом соединены обмотки статора асинхронного двигателя:
A B
B C
C
1) «звездой» без нейтрального провода;
2)«звездой» с нейтральным проводом;
3)«треугольником»?
166

4.Ротор четырехполюсного асинхронного двигателя, подключенного к сети трехфазного тока с частотой f=50 Гц, вращается с
частотой n2=1440 об/мин. Чему равно скольжение: 1) 0,04; 2) 0,1; 3) 0,02; 4) 0,08?
5.Как изменится скольжение асинхронного двигателя при изме-
нении нагрузки на валу от 0 до Мн:
1) увеличится; 2) уменьшится; 3) останется неизменным?
6.Будет ли работать трехфазный асинхронный двигатель при обрыве электрической цепи ротора:
1) нет, так как в обмотке ротора не будет ЭДС; 2) нет, так как в обмотке ротора не будет тока; 3) будет?
7.Каким образом можно увеличить пусковой момент асинхронного двигателя с фазным ротором:
1) применить ротор с двойной «беличьей клеткой»;
2) применить ротор с глубоким пазом;
3) увеличить количество фаз;
4) ввести пусковые реостаты в цепь обмотки ротора?
8.В каком положении находится скользящий контакт пускового реостата во время пуска асинхронного двигателя? Указать номер положения:
1) |
1; |
1 |
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|||||||||
2 |
|
|
|
2 |
|
|
|
2 |
|
|
||
|
|
|
|
|
|
|||||||
2) |
2; |
3 |
|
3 |
|
3 |
|
|
||||
|
|
|
|
|||||||||
3)3.
9.Чему равна сумма потерь мощности электрического двигателя при КПД η=85%, если двигатель потребляет мощность Р1н=30 кВт:
1)3,0 кВт; 2) 1,5 кВт; 3) 4,5 кВт; 4) 0,5 кВт?
10.Как изменится ЭДС обмоток ротора Е2 от момента запуска двигателя до набора оборотов холостого хода:
1)уменьшится; 2) увеличится; 3) останется неизменной?
167

11. В каких соотношениях находятся величины добавочных сопротивлений, включенных в цепь ротора асинхронного двигателя, на приведенных графиках механических характеристик:
n2
R2+Rд1 |
1) Rд1>Rд2>Rд3; |
|
2) Rд1=Rд2=Rд3; |
R2+Rд2 |
3) Rд1<Rд2<Rд3? |
|
|
R2+Rд3 |
|
М |
|
12. Какое из перечисленных уравнений соответствует уравнению механической характеристики асинхронного двигателя:
|
9550 P |
|
|
n −n |
|
|
|
|
|
2M |
кр |
|
|
|||
1) M = |
|
2 |
; 2) |
S = |
1 |
2 |
; 3) |
M |
= |
|
|
|
|
|
|
? |
n |
2 |
n |
|
|
S |
|
|
Sкр |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
1 |
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sкр |
|
S |
|
|
|
13.Как изменить направление вращения вращающегося магнитного поля асинхронного двигателя:
1) изменить частоту трехфазного тока; 2) поменять местами два любых провода, подводящих к двигате-
лю трехфазное питающее напряжение; 3) поменять местами все три провода трехфазной сети?
14.Какая из приведенных схем позволяет осуществить реверс асинхронного двигателя?
1) A B C |
2) A B C |
3) A B C |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
168

15. Какой участок механической характеристики асинхронного двигателя соответствует устойчивой работе в двигательном режиме:
1) |
аб; |
n2 |
|
|
|
|
в |
|
|||
2) |
вг; |
г |
б |
||
|
|||||
3) |
бв; |
|
|||
|
a |
|
|||
4) |
ад? |
0 |
M |
||
д |
|||||
|
|
|
16. Каким отрезком на графике механической характеристики асинхронного двигателя определяется величина пускового момента двигателя:
n2 ж |
е |
1) аб; |
д |
2) ав; |
3)вг;
4)ед?
a |
б в |
г |
M |
17.Как изменится скольжение асинхронного двигателя, если уменьшить тормозной момент на его валу:
1) не изменится; 2) увеличится; 3) уменьшится; 4) для ответа на вопрос недостаточно данных?
18.С какой целью при пуске двигателя в цепь обмотки ротора с контактными кольцами вводят добавочное сопротивление:
1) для уменьшения пускового момента и пускового тока;
2) для уменьшения времени разбега; 3) для уменьшения пускового тока и увеличения пускового мо-
мента; 4) для увеличения тока холостого хода?
19.При регулировании частоты вращения асинхронного трехфазного двигателя с фазным ротором были получены следующие частоты вращения: 1475; 1450; 1425; 1400 об/мин. Каким способом осуществлялось регулирование частоты вращения:
1) за счет изменения числа пар полюсов;
2) за счет изменения сопротивления в цепи ротора?
169
20.При регулировании частоты вращения асинхронного двигателя были получены следующие частоты вращения: 1500; 1000; 750 об/мин. Каким способом осуществлялось регулирование частоты вращения:
1) введением в цепь ротора регулировочных сопротивлений;
2) введением в цепь статора сопротивлений;
3) изменением числа пар полюсов двигателя?
21.Как изменится коэффициент мощности асинхронного двигателя при переходе двигателя от режима холостого хода к номинальной нагрузке на валу:
1) не изменится; 2) уменьшится; 3) увеличится?
22.Как зависит коэффициент мощности cosϕ асинхронного двигателя от нагрузки на валу:
1)cosϕ растет с уменьшением нагрузки;
2)cosϕ растет с увеличением нагрузки;
3)cosϕ не зависит от нагрузки?
23. Какому режиму работы двигателя соответствует участок ае на механической характеристике асинхронного двигателя:
|
n2 |
г |
n1 |
в |
|
|
n2 |
б
a M 
 G
G
де
1)двигательному режиму;
2)режиму динамического торможения;
3)режиму с рекуперацией энергии в сеть;
4)режиму противовключения?
170
24.При какой нагрузке КПД двигателя достигает максимума: 1) номинальной; 2) равной примерно половине номинальной;
3) несколько больше номинальной?
25.Какое из перечисленных уравнений используется для расчета номинального момента асинхронного двигателя:
|
9550 P |
|
|
|
|
2 M кр |
|
|
|
n |
−n |
|
|
|||
1) M = |
|
2 |
; 2) |
M |
= |
|
|
|
|
|
; |
3) S = |
1 |
|
2 |
? |
n |
2 |
|
S |
|
Sкр |
|
|
n |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
+ |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
Sкр |
S |
|
|
|
|
|
|
|
|
26. Индуктивное сопротивление фазы обмотки неподвижного ротора асинхронного двигателя XL=1,45 Ом. Вычислить индуктивное сопротивление вращающегося ротора со скольжением s=0,04.
1)0,058 Ом; 2) 36,25 Ом; 3) 1,41 Ом; 4) 1,49 Ом.
27.Ротор асинхронного трехфазного двигателя, подключенного к сети переменного тока частотой 50 Гц, вращается с частотой 1440 об/мин. Чему равны скольжение и частота тока ротора?
1) 0,04; 2 Гц; 2) 0,02; 2 Гц; 3) 0,04; 1 Гц; 4) 0,02; 1 Гц.
28.Скольжение шестиполюсного трехфазного асинхронного двигателя с короткозамкнутым ротором при изменении нагрузки от холостого хода до номинального значения изменяется в пределах 0,1–6%. Определить диапазон изменения частоты вращения ротора, если частота питающего напряжения 50 Гц.
1) 470–499,5 об/мин; 2) 940–999 об/мин; 3) 1880–1998 об/мин; 4) 2820–2997 об/мин.
29.Трехфазный двухполюсный асинхронный двигатель при номинальной нагрузке имеет скольжение S=4%. Чему равна частота вращения ротора, если частота переменного тока, питающего обмотку статора, f=50 Гц:
1) 960 об/мин; 2) 1440 об/мин; 2) 2880 об/мин; 4) 3840 об/мин?
30.Мощность, подводимая к асинхронному двигателю, составляет 20 кВт. Определить КПД двигателя, если суммарные потери мощности составляют 2000 Вт.
1) 0,900; 2) 0,909; 3) 0,959; 4) 0,890.
171
8. ТРЕХФАЗНЫЕ СИНХРОННЫЕ МАШИНЫ
8.1. Назначение и область применения
Как все электрические машины, синхронные машины обратимы: они могут работать и в режиме генератора, и в режиме двигателя. Основное применение синхронные машины нашли как промышленные генераторы для выработки электрической энергии на электростанциях. Единичная мощность современных электрогенераторов достигает 1500 МВА. Синхронные машины применяются также в качестве двигателей большой мощности для крупных насосов, компрессоров, воздуходувок, в металлургии для главных приводов непрерывной прокатки. Единичная мощность синхронных двигателей достигает нескольких десятков мегаватт.
8.2. Устройство трехфазной синхронной машины
Основными частями синхронной машины являются статор и ротор, причем статор не отличается от статора асинхронной машины. Сердечник статора собран из изолированных друг от друга пластин электротехнической стали и укреплен внутри корпуса. В пазах, расположенных с внутренней стороны статора под углом 120° друг относительно друга, размещена трехфазная обмотка.
Ротор содержит обмотку возбуждения (электромагнит) или реже постоянный магнит с числом пар полюсов, равным числу пар полюсов вращающегося магнитного поля статора. Концы обмотки возбуждения присоединяются к двум кольцам, укрепленным на валу ротора. На кольца накладываются щетки, к которым подключается источник постоянного напряжения.
Число пар полюсов р зависит от синхронной частоты вращения ротора n2. У многополюсной синхронной машины ротор имеет р пар полюсов. Токи в обмотке статора образуют тоже р пар полюсов вращающегося магнитного поля (как у асинхронной машины). Ротор должен вращаться с частотой вращения поля, следовательно, его синхронная частота вращения
n2 |
= |
60 f |
, |
(8.1) |
|
p |
|||||
|
|
|
|
где f – частота тока, протекающего через обмотку статора.
172

При частоте f=50 Гц наибольшую частоту имеют двухполюсные роторы. На тепловых и атомных электростанциях роторы синхронных генераторов вращаются паровыми турбинами с частотой 3000 и 1500 об/мин. Быстроходные синхронные двигатели на эти частоты называют турбодвигателями. Ротор такой машины имеет цилиндрический сердечник, по длине которого расположены пазы для обмотки возбуждения (рис. 8.1).
Рис. 8.1. Расположение обмотки в неявнополюсном роторе
Распределенная по пазам обмотка возбуждения закреплена стальными или бронзовыми клиньями. Лобовые части обмотки закрепляются бандажными металлическими кольцами. Такой ротор называется неявнополюсным. Он способен выдерживать большие центробежные усилия (рис. 8.2).
Рис. 8.2. Внешний вид неявнополюсного ротора: 1 – сердечник; 2 - металлические клинья; 3 – контактные кольца
Тихоходные машины (гидрогенераторы) вращаются относительно медленно. Это вынуждает делать их многополюсными с явными полюсами и в большинстве случаев – с вертикальным валом. Частота вращения ротора этих генераторов составляет от 60 до нескольких сотен оборотов в минуту, чему соответствует несколько десятков пар полюсов. Например, при числе пар полюсов р=36 частота вращения составляет 83,3 об/мин. Вследствие относительно малых частот вра-
173

щения генераторы к гидравлическим турбинам имеют значительно большую массу на единицу мощности(свыше 8 кг/кВА), чем генераторы к паровым турбинам (менее 2,5 кг/кВА).
2
 3
3
1
Рис. 8.3. Явнополюсный ротор: 1 – контактные кольца; 2 – катушка обмотки возбуждения; 3 – полюсы
Явнополюсный ротор представляет собой стальную поковку. К ободу ротора крепятся полюсы, на которые надеваются катушки возбуждения, соединяемые между собой последовательно. Явнополюсный ротор имеет сосредоточенную на катушках обмотку (рис. 8.3).
а |
б |
Рис. 8.4. Условное обозначение на схеме синхронной машины: а – с явнополюсным ротором; б – с неявнополюсным ротором
Условное обозначение синхронной машины на электрической схеме приведено на рис. 8.4.
174

8.3. Принцип действия синхронной машины
Магнитное поле, создаваемое током возбуждения ротора, называется основным. Магнитная цепь машины симметричная (рис. 8.5).
а |
|
б |
|
|
|
Рис. 8.5. Устройство магнитной системы синхронной машины с явнополюсным (а) и неявнополюсным (б) роторами
Для получения синусоидальной ЭДС в проводах фазных обмоток статора необходимо, чтобы индукция в воздушном зазоре, создаваемая магнитным полем тока ротора, распределялась по синусоидальному закону вдоль окружности ротора. В явнополюсной машине это достигается увеличением ширины воздушного зазора от середины полюса к краям. В быстроходных машинах с неявными полюсами используется соответствующее распределение обмотки возбуждения вдоль окружности ротора. У синхронной машины обмотки статора и ротора имеют одинаковое число пар полюсов p.
Когда синхронная машина работает в режиме генератора, ротор вращается турбиной или приводным двигателем. При вращении магнитное поле ротора по отношению к неподвижной трехфазной обмотке статора изменяется синусоидально во времени, что вызывает наведение в каждой фазе синусоидальных ЭДС, равных по амплитуде, но сдвинутых по фазе друг относительно друга на одну треть периода. Частота ЭДС пропорциональна частоте вращения ротора
f = |
n2 р |
, |
(8.2) |
|
|||
60 |
|
|
|
где n2 – частота вращения ротора; об/мин; р – число пар полюсов. Таким образом, синхронный генератор является симметричным
трехфазным источником электроэнергии, т. е. преобразует механиче-
175

скую энергию турбины (приводного двигателя) в электрическую энергию трехфазного тока.
При работе генератора в режиме холостого хода магнитные оси полюсов статора Nc, Sc и полюсов ротора Nр, Sр (рис. 8.6, а) совпадают. При подключении к обмотке статора синхронного генератора трехфазной нагрузки появляются токи статора, которые создают вращающееся магнитное поле. Это поле вращается синхронно с полем ротора, и, следовательно, они неподвижны друг относительно друга. Активная составляющая тока, протекающего через обмотку статора, создает тормозной электромагнитный момент, который должен преодолеваться турбиной или приводным двигателем. Наличие тормозного момента приводит к тому, что магнитная ось статора смещается относительно магнитной оси полюса ротора в сторону отставания тем больше, чем больше активная нагрузка генератора, т.е. чем больше тормозной момент. Угол между магнитными осями полюсов ротора и поля статора называется углом рассогласования θ (см. рис. 8.6, а).
Когда синхронная машина работает в режиме двигателя, обмотка статора подключается к трехфазной сети. При этом, как и в статоре асинхронного двигателя, возникает вращающееся магнитное поле. Частота вращения магнитного поля
|
|
n |
= |
60 f |
. |
|
|
(8.3) |
||||||||
|
|
|
|
|
||||||||||||
1 |
|
|
|
p |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
n1 |
|
|
|
|
|
|
|
|
|
|
|
|
n1 |
|
||
|
|
|
|
n2 |
|
|
|
|
|
θ |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
θ |
|
|
n2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а б
Рис. 8.6. Появление угла рассогласования θ синхронного генератора (а) и синхронного двигателя (б): Nc, Sc – полюсы статора; Nр, Sр – полюсы ротора
Обмотка возбуждения ротора подключена к источнику постоянного напряжения и создает постоянное магнитное поле. Таким обра-
176

зом, ротор является постоянным магнитом, находящимся в магнитном поле статора. При этом полюс магнитного поля статора притягивает противоположный полюс ротора, стремясь совместить их магнитные оси, т.е. полюсы вращающегося магнитного поля статора ведут за собой полюсы ротора. При работе двигателя в режиме холостого хода, пренебрегая потерями на трение в подшипниках и вентиляционными потерями, можно считать, что магнитные оси полюсов статора Nc, Sc и полюсов ротора Nр, Sр (рис. 8.6, б) совпадают.
Появление на валу двигателя механической нагрузки приводит к возникновению тормозного момента, в результате чего ось полюсов ротора отстает от оси полюсов вращающегося магнитного поля статора на угол рассогласования θ (см. рис. 8.6, б), величина которого зависит от момента нагрузки на валу двигателя. С увеличением момента нагрузки усиливается торможение ротора, магнитные линии «растягиваются» и увеличивается угол рассогласования.
8.4. Механическая характеристика синхронного двигателя
Вращаясь, магнитное поле ста- |
n2 |
|
тора увлекает за собой ротор с его |
|
|
магнитным полем, и ротор вращается |
|
|
с частотой вращения магнитного по- |
|
М |
ля. Ротор и магнитное поле статора |
|
|
вращаются синхронно (n2=n1). Таким образом, частота вращения ротора определяется частотой вращения магнитного поля статора и не зави-
сит от момента нагрузки на валу. Механическая характеристика синхронного двигателя представлена на рис. 8.7.
8.5.Особенности пуска синхронного двигателя
Врежиме пуска, когда ротор неподвижен, магнитное поле статора вращается относительно неподвижного ротора с синхронной час-
тотой n1. Ротор обладает значительной массой и моментом инерции. Вращающееся магнитное поле статора действует на неподвижный, возбужденный постоянным током ротор со знакопеременной силой, не создающей момента. При этом ротор остается неподвижным. Для пуска синхронного двигателя его ротор снабжают специальной
177

|
1 |
|
|
пусковой асинхронной обмоткой типа |
|
|
|
|
«беличье колесо» (рис. 8.8). В начальный |
|
|
|
2 |
|
|
период пуска синхронный двигатель ра- |
|||
|
|
|
|
|
|
|
|
|
ботает как асинхронный. Когда частота |
|
|
|
|
вращения ротора становится близкой к |
|
|
|
|
синхронной (0,95n1), включается обмот- |
|
|
|
|
ка возбуждения, двигатель «втягивается |
|
|
|
|
в синхронизм» и ротор вращается с син- |
Рис. 8.8. Явнополюсный ро- |
хронной частотой. При синхронной час- |
|||
тор с обмоткой возбуждения 1 |
тоте вращения пусковая обмотка не ока- |
|||
и пусковой короткозамкну- |
зывает влияние на работу синхронного |
|||
той обмоткой 2 |
двигателя (подобно ротору асинхронно- |
|||
го двигателя при скольжении S=0).
8.6. Схема замещения и уравнения электрического состояния синхронной машины
Трехфазная электрическая система большой мощности состоит из большого числа трехфазных источников и приемников электрической энергии, работающих параллельно. Можно считать, что частичное изменение числа источников и приемников электрической энергии в системе большой мощности не влияет на режим ее работы. Поэтому напряжение на общих шинах системы и частоту можно считать постоянными величинами.
|
|
|
I |
|
|
|
|
I |
|
|
|
|
|
|
|
XL1 |
|
|
|
|
|
|
|||
UXL1 |
|
|
|
|
|
|
|
|||||
|
|
|
UXL1 |
|
|
|
||||||
|
|
|
|
|
XL1 |
|
|
|||||
Е |
ZН |
|
U |
U |
||||||||
|
|
|
|
|
|
|||||||
|
Е |
|
|
|
||||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
а |
|
|
|
|
б |
|
|
||
|
|
|
Рис. 8.9. Схемы замещения фазы синхронного генератора (а) |
|
|
|||||||
|
|
|
|
и синхронного двигателя (б) |
|
|
||||||
Приведенные здесь схемы замещения и соответствующие им векторные диаграммы справедливы для неявнополюсных и ненасыщенных машин.
178
Схема замещения одной фазы синхронного генератора изображена на рис. 8.9, а. При вращении ротора с постоянным магнитным полем в каждой фазе обмотки статора наводятся ЭДС, которые определяют напряжения на зажимах обмотки статора генератора. ЭДС одной фазы обмотки статора в схеме замещения представлена идеальным источником ЭДС Е.
При подключении к обмотке статора приемника электроэнергии ZН появляется ток I. Этот ток, протекая через фазу обмотки статора, создает свое магнитное поле, которое наводит в фазе обмотки статора ЭДС самоиндукции. Данное явление отражено в схеме замещения индуктивным элементом с сопротивлением XL1 (см. рис. 8.9, а).
Схема замещения одной фазы синхронного двигателя изображена на рис. 8.9, б. В синхронном двигателе при вращении ротора с постоянным магнитным полем в фазе обмотки статора наводится ЭДС Е, подобно ЭДС синхронного генератора. Эта ЭДС уравновешивает напряжение U источника, подключенного к фазе обмотки статора. Ее называют противоЭДС. Создание противоЭДС в фазе обмотки статора синхронного двигателя отражается в схеме замещения идеальным источником ЭДС Е (см. рис. 8.9, б). Ток статора синхронного двигателя также создает магнитное поле, которое наводит в фазе обмотки статора ЭДС самоиндукции. Это учитывается в схеме замещения индуктивным элементом с сопротивлением XL1.
Так как активное сопротивление фазы обмотки статора пренебрежимо мало, в схемах замещения (см. рис. 8.9, а, б) оно не учитывается.
Схемы замещения позволяют составить уравнения электрического состояния синхронного генератора и синхронного двигателя.
Уравнение электрического состояния синхронного генератора по второму закону Кирхгофа для его схемы замещения (см. рис. 8.9, а) имеет вид
|
|
|
|
|
|
|
(8.4) |
E |
=U |
+U XL1 . |
|||||
Уравнение электрического состояния синхронного двигателя по второму закону Кирхгофа для схемы его замещения (см. рис. 8.9, б) имеет вид
|
|
|
|
|
|
|
(8.5) |
U |
= E +U XL1 . |
||||||
Схемы замещения и уравнения электрического состояния позволяют анализировать режимы работы синхронных машин.
179
8.7. Векторные диаграммы синхронного генератора
Векторные диаграммы, соответствующие выражению (8.4), приведены на рис. 8.10. На рис. 8.10, а вектор тока по отношению к вектору напряжения повернут на угол φ в сторону отставания, что соответствует активно-индуктивному характеру сопротивления нагрузки
ZН (см. рис. 8.9, а).
|
|
|
UXL1 I |
I |
|
|
UХС |
|
|
UXL1 |
|
90° |
|
U |
|||
Е |
|
|
|
|||||
|
Е |
90° |
|
|
|
Е |
UXL1 |
|
|
|
|
|
|
||||
|
|
U=UR |
|
UR |
|
|||
|
U |
UХL |
|
|
|
|
||
|
90° I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
UR |
|
|
|
|
φ |
|
|
θ |
θ |
|
|
|
|
θ |
|
|
|
|
|
|
|
|||
φ |
φ=0 |
|
а |
б |
в |
|
Рис. 8.10. Векторные диаграммы фазы синхронного генератора для |
|
случаев активно-индуктивной (а), активной (б) и активно-ёмкостной (в) |
||
|
нагрузки: UR – активная составляющая напряжения нагрузки; |
|
|
UХL – индуктивная составляющая напряжения нагрузки; |
|
|
UXС – ёмкостная составляющая напряжения нагрузки |
|
На рис. 8.10, б вектор тока по направлению совпадает с вектором напряжения (φ=0), что соответствует активному характеру нагрузки.
На рис. 8.10, в вектор тока по отношению к вектору напряжения повернут на угол φ в сторону опережения, что соответствует активноёмкостному характеру нагрузки.
8.8. Внешние характеристики синхронного генератора
Зависимости напряжения U генератора от тока нагрузки I при неизменных токе возбуждения ротора Iр, частоте вращения ротора п2 и угле сдвига по фазе между током и напряжением φ называются внешними характеристиками генератора. Их можно построить с помощью векторных диаграмм (см. рис. 8.10). ЭДС Е является величиной постоянной при неизменном магнитном потоке и в соответствии с урав-
180

нением электрического состояния определяется суммой напряжения U и падения напряжения UXL1. Следовательно, как видно из векторных диаграмм, с увеличением тока нагрузки I при активной и актив- но-индуктивной нагрузках напряжение генератора уменьшается (см. рис. 8.10, а, б); при активно-ёмкостной нагрузке – увеличивается (см.
рис. 8.10, в).
U
Uном
0
|
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
||||
φ>0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosφ=0,6 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
φ=0 |
|
|
|
|
|
|
|
|
|
|
|
φ<0 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosφ=0,8 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ>0 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ<0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
φ=0 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosφ=0,8 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosφ=0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
а |
|
Iном |
|
I |
|
|
|
|
|
|
б |
Iном Iк |
I |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Рис. 8.11. Внешние характеристики синхронного генератора при различных видах нагрузки, полученные при одинаковом для всех характеристик номинальном напряжении Uном (а)
и одинаковом напряжении холостого хода U0=E0 (б)
На рис. 8.11, а изображены внешние характеристики генератора при различных видах нагрузки, полученные при одинаковом для всех характеристик Uном. Если устанавливать одинаковое напряжение при холостом ходе U0=E0 (рис. 8.11, б), то при номинальном токе напряжения Uном будут различными. При U=0 (короткое замыкание) все характеристики пересекаются в одной точке, соответствующей значению тока Iк.
8.9. Регулировочные характеристики синхронного генератора
Зависимости тока возбуждения ротора Iр от тока нагрузки I при неизменных напряжении U, угле φ и частоте вращения ротора п2 называются регулировочными характеристиками. Они показывают, как надо изменять ток возбуждения генератора, чтобы поддерживать его напряжение неизменным при изменении тока нагрузки.
Величина ЭДС Е при постоянной частоте вращения ротора n2 пропорциональна току возбуждения ротора Iр. Поэтому, как видно из векторных диаграмм, представленных на рис. 8.12, с возрастанием тока нагрузки при ψ>0 ток возбуждения ротора необходимо увеличивать (см. рис. 8.12, а, б), а при ψ<0 – уменьшать (см. рис. 8.12, в).
181

90° |
I |
UXL1 |
|
|
|
UХС |
||
Е |
UХL 90° I |
|
||||||
Е UXL1 |
U=UR |
I |
|
U |
||||
U |
|
|||||||
|
|
|
|
|
UR |
90° |
UXL1 |
|
|
|
|
|
|
UR |
Е |
||
|
|
|
ψ |
|
|
ψ |
||
ψ |
φ=0 |
|
|
|
|
|||
|
|
|
|
|
φ |
|||
|
|
|
|
φ |
|
|||
|
|
|
|
|
|
|
||
а |
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
Рис. 8.12. Векторные диаграммы синхронного генератора с неявно выраженными полюсами для активной (а), активно-индуктивной (б) и активно-емкостной (в) нагрузок: ψ – угол сдвига по фазе между ЭДС Е и током I
Регулировочные характеристики синхронного генератора приведены на рис. 8.13.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Чем больше угол ψ по аб- |
|
|
|
|
|
cosψ=0 |
|
|
|
|
|
|
|
|||||
|
Iр |
|
|
|
|
|
|
|
|
|
|
солютной величине, тем боль- |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
ψ>0 |
|
|
|
|
|
|
|
ше изменение напряжения при |
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
cosψ=1 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
переходе от режима холостого |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
хода к режиму номинальной |
|
|
|
|
|
|
|
|
|
|
cosψ=0,8 |
|
|
|
нагрузки и тем в большей сте- |
|||
|
|
|
|
|
ψ<0 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пени требуется изменять ток |
||
|
|
|
|
|
|
|
|
cosψ=0 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
возбуждения. Чтобы подклю- |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ченные к генератору потреби- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Iном |
|
|
|
|
|
|
|
I |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
тели работали при напряжении, |
||||||
|
Рис. 8.13. |
Регулировочные характери- |
|||||||||||||||
|
|
близком к номинальному, при- |
|||||||||||||||
|
|
стики синхронного генератора |
|
|
|
меняются специальные быст- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
родействующие регуляторы тока возбуждения.
8.10. U-образные характеристики синхронного генератора
Ценной особенностью синхронного генератора, подключенного к электрической системе большой мощности, является возможность регулирования его реактивного тока посредством тока возбуждения, изменение которого приводит к изменению реактивной мощности: при большом токе ротора (перевозбуждении) генератор отдает в сеть
182

активную и индуктивную мощности, при недовозбуждении – активную и ёмкостную мощности.
Зависимость тока статора от тока возбуждения ротора синхронного генератора при постоянных значениях активной мощности на валу или (так как Р=Мвр·ωр, где Р – активная мощность на валу; Мвр – электромагнитный момент; ωр=const – угловая скорость вращения ротора) электромагнитного момента отражают U-образные (или V-образные) характеристики (рис. 8.11, а), показывающие возможность регулирования реактивной мощности. Минимумы кривых соответствуют чисто активным токам статора (cos φ=1). В любой точке U-образной кривой:
cos φ= |
Iа |
. |
(8.6) |
|
|||
|
I |
|
|
Зависимость тока ротора для одной из U-образных кривых при
Р=const≠0 показана на рис. 8.11, б.
I
0
|
Граница |
|
|
|
|
|
|
|
|
|
|
|
||||
|
I cos φ |
|
|
|
|
|
||||||||||
|
устойчивости |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P=const |
|
|
cos φ=1 Р2> Р1 |
|
|
|
|
1,0 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
cos φ |
||||||
|
|
Р1>0 |
|
|
|
|
|
|
|
|
|
I |
||||
|
|
Р=0 |
|
|
|
|
|
|
|
|
|
|
|
|||
QС |
|
|
|
|
|
|
|
|
|
cos φ (ёмк.) |
|
|
cos φ (инд.) |
|||
|
QL |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
а |
|
Iр |
|
|
|
|
|
|
|
|
|
|
Iр |
||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|||
|
|
|
|
|
|
|
|
|
|
|
||||||
Рис. 8.11. U-образные характеристики синхронного генератора (а) и зависимости тока статора I и cos φ от тока возбуждения ротора (б)
Левее кривой cos φ=1 (см. рис. 8.11, а) ток имеет ёмкостную реактивную составляющую (QC), правее – индуктивную (QL). В левой части графика U-образные кривые не доходят до оси ординат, кроме первой кривой при Р=0. Это означает, что при малом токе возбуждения IР мала амплитуда электромагнитного момента и при увеличении активной мощности (или момента турбины) может произойти выпадение генератора из синхронизма.
183

8.11.Коэффициент мощности, векторные диаграммы
иU-образные характеристики синхронного двигателя
Важным свойством синхронной машины, работающей в трехфазной электрической системе большой мощности (U=const), является возможность регулирования ее коэффициента мощности. В синхронном двигателе это осуществляется регулированием тока возбуждения. Анализ зависимости коэффициента мощности синхронного двигателя от тока возбуждения может быть проведен на основании его уравнения электрического состояния (8.5), из которого следует:
|
|
|
|
|
|
|
(8.7) |
E |
=U |
−U XL1 . |
|||||
Векторные диаграммы, соответствующие выражению (8.7), приведены на рис. 8.12 для разных режимов работы при разной величине тока возбуждения.
|
|
|
|
|
|
UXL1 |
|
|
UXL1 |
|
UXL1 |
|
E |
U |
|
|
U 90° |
E |
|
|
|
|
|
U |
|||
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
I |
θ |
90° |
I |
I=Ia |
I 90° |
Ia θ |
a |
|
|
||||
|
|
φ<0 |
|
φ=0 |
|
φ>0 |
|
|
|
|
|
|
|
|
|
|
IL |
|
IC |
|
|
|
а |
|
б |
в |
|
|
|
Рис. 8.12. Векторные диаграммы фазы синхронного двигателя, |
||||
|
|
являющегося: а - активно-индуктивной нагрузкой; |
|
|||
|
|
б - активной нагрузкой; в – активно-емкостной нагрузкой |
||||
Во всех случаях вектор напряжения источника, к которому подключен синхронный двигатель, изображен направленным вверх. Величина этого напряжения во всех режимах одна и та же и равна напряжению источника. Величина ЭДС E в разных режимах разная и определяется величиной магнитного потока, т.е. током возбуждения ротора Iр. Падение напряжения на индуктивном сопротивлении обмотки статора UXL1 определяется, исходя из выражения (8.5), как векторная разность между напряжением источника U и ЭДС E:
|
|
|
|
|
|
|
(8.8) |
U |
XL1 =U − Е . |
||||||
184 |
|
|
|
|
|||
Вектор тока статора повернут на угол 90° по отношению к падению напряжения UXL1 в сторону отставания, что соответствует индуктивному сопротивлению обмотки статора.
На рис. 8.12, а величина ЭДС E меньше напряжения U. При этом ток статора отстает по фазе от напряжения (разность фаз φ<0), синхронный двигатель проявляет себя как активно-индуктивный элемент в цепи синусоидального тока с коэффициентом мощности cosφ <1.
При увеличении тока возбуждения IВ увеличивается магнитный поток и ЭДС E. При этом разность фаз φ уменьшается, коэффициент мощности увеличивается. При определенном соотношении между ЭДС E и напряжением U разность фаз становится равной нулю (рис. 8.12, б), а коэффициент мощности cosφ=1, синхронный двигатель проявляет себя как активное сопротивление.
При дальнейшем увеличении тока возбуждения соотношение между ЭДС E и напряжением U оказывается таким, что ток статора опережает по фазе напряжение (разность фаз φ>0) (рис. 8.12, в). В этом режиме синхронный двигатель проявляет себя как активноёмкостный элемент в цепи синусоидального тока.
Режим работы синхронного двигателя при разности фаз φ<0, когда ток возбуждения недостаточен, называют режимом недовозбуждения. Режим работы при разности фаз φ>0, когда ток возбуждения избыточен, называют режимом перевозбуждения. Таким образом, изменение тока возбуждения синхронного двигателя позволяет изменять его коэффициент мощности, устанавливать наиболее рациональный режим его работы с коэффициентом мощности cosφ=1.
При изменении тока возбуждения меняется не только разность фаз между напряжением и током синхронного двигателя. Меняется также величина тока статора. При этом активная составляющая тока статора определяется активной мощностью двигателя, т.е. механической мощностью на валу, и остается неизменной. Ее величина определяется проекцией вектора тока на вектор напряжения (см. рис. 8.12). Меняется только реактивная составляющая тока. В режиме нормального возбуждения (см. рис. 8.12, б) реактивная составляющая тока статора оказывается равной нулю, величина тока статора определяется только его активной составляющей и принимает наименьшее значение.
Зависимость тока статора от тока возбуждения при постоянных значениях активной мощности Р или (так как Р=Мэм·ωр, где ωр=const
– угловая скорость вращения ротора) электромагнитного момента Мэм
185

называется U-образной (или V-образной) характеристикой синхронного двигателя (рис. 8.13). Чем больше момент нагрузки на валу двигателя, тем больше активная мощность и соответственно активная составляющая тока статора и тем выше расположена U-образная характеристика.
I cos φ=1

 Р1>0
Р1>0
Р=0
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
IВ |
|
|
|
|
|
|
|
|
|
|||
|
|
|
Недовоз- |
Перевоз- |
|||||||
|
|
|
|
||||||||
|
|
|
|
||||||||
|
|
|
|
|
|||||||
|
|
буждение |
буждение |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 8.13. U-образные характеристики
синхронного двигателя
Способность синхронного двигателя работать в режиме активноёмкостного приемника используется для компенсации реактивной мощности (повышения коэффициента
Eмощности) крупного потребителя электроэнергии, в составе которого он рабо-
UXL1 |
тает. Иногда эта функция является ос- |
|
новной для синхронного двигателя. Та- |
||
|
Uкой двигатель называется синхронным компенсатором и используется в качестве ёмкостного элемента большой мощности. В этом случае двигатель работает без нагрузки на валу. Поэтому активная
I=IC |
φ=90° |
составляющая тока ротора практически |
Рис. 8.14. Векторная |
равна нулю. Таким образом, перевозбу- |
|
жденный синхронный двигатель без на- |
||
диаграмма синхронного |
грузки на валу является синхронным |
|
компенсатора |
компенсатором (см. рис. 8.13). Вектор- |
|
|
ная диаграмма синхронного компенсатора приведена на рис. 8.14. |
|
|
186 |
8.12. Угловая характеристика синхронной машины
Угловой характеристикой называется зависимость мощности или (так как Р=Мэм·ωр, где Р – активная мощность на валу; Мэм – электромагнитный момент; ωр=const – угловая скорость вращения ротора) электромагнитного момента синхронной машины от угла θ рассогласования магнитных осей полюсов статора и ротора или (что то же самое) угла сдвига по фазе между ЭДС Е и напряжением U фазы стато-
ра (см. рис. 8.10, а, в, 8.12, а, в) |
|
|
|
|
М=Мm·sinθ, |
(8.9) |
|||
где |
E U |
|
|
|
Мm = 3 |
. |
(8.10) |
||
|
||||
|
X L1 ω0 |
|
||
В режиме генератора магнитная ось полюса ротора смещена на угол θ в сторону опережения; ЭДС E статора опережает по фазе напряжение U на угол θ (θ>0). В режиме двигателя магнитная ось полюса ротора смещена на угол θ в сторону отставания; ЭДС Е статора отстает по фазе от напряжения U на угол θ (θ<0). Графики угловой характеристики синхронной машины представлены на рис. 8.15.
Если θ>0, то мощность и момент положительны, машина работает в режиме генератора и отдает электрическую мощность, а электромагнитный момент при этом является тормозящим моментом, который преодолевается первичным двигателем. Вращающему моменту первичного двигателя (турбины) Мвр1 соответствует отдаваемая генератором в сеть активная мощность Р1 при угле рассогласования θ1. Как видно из графика угловой характеристики (см. рис. 8.15), уменьшение тока возбуждения ротора (Iр2), а следовательно, ЭДС Е или снижение напряжения на зажимах генератора, согласно выражению (8.10), уменьшает амплитуду электромагнитного момента, что приводит к увеличению угла рассогласования до значения θ2 и снижению устойчивости работы генератора.
При θ=90° противодействующий момент генератора достигает максимального значения (при заданных E и U). При дальнейшем увеличении вращающего момента турбины генератор не способен создать равного противодействующего момента, скорость ротора становится больше синхронной, генератор выпадает из синхронизма. Амплитудное значение электромагнитного момента Мm называется пределом статической устойчивости.
187

|
|
Р, М |
|
|
|
|
Устойчивый Неустойчивый |
||
|
|
режим |
|
режим |
|
|
|
Мm |
Iр1>Iр2 |
|
|
|
|
|
|
Режим двигателя |
Мвр1 |
|
|
|
|
|
|
Iр2 |
–180° |
–90° |
0 |
|
θ |
|
|
θ1 θ2 |
90° |
180° |
|
Мm |
Режим генератора |
||
Неустойчивый Устойчивый режим режим
Рис. 8.15. Угловая характеристика синхронной машины
На пределе статической устойчивости эксплуатация генератора недопустима. Необходим определенный запас по электромагнитному моменту. Для обеспечения динамической устойчивости синхронный генератор должен эксплуатироваться при угле рассогласования θ не более 30° при номинальной мощности. При этом перегрузочная способность по мощности составляет не менее двух. Устойчивое равновесие моментов сохраняется только на восходящем участке угловой характеристики до θ=90°.
Уменьшение вращающего момента первичного двигателя вызывает соответствующее уменьшение угла θ, и когда θ станет равным нулю, первичный двигатель будет лишь покрывать потери синхронной машины; в этих условиях машина не будет отдавать энергию в сеть как генератор и потреблять ее из сети как двигатель. Этот режим является промежуточным между режимами генератора и двигателя.
Если θ<0, то мощность и момент отрицательны (см. рис. 8.15), машина работает в режиме двигателя. Это значит, что ротор отстает
188

от результирующего поля машины, и последнее станет ведущим, а ротор – ведомым. Двигатель потребляет энергию из сети, его электромагнитный момент является вращающим, уравновешивающим механический тормозящий момент, приложенный к валу машины.
Угловая характеристика синхронного двигателя, как и синхронного генератора, определяется выражением (8.9). Амплитуда угловой характеристики характеризует перегрузочную способность синхронного двигателя или предел его статической устойчивости в синхронизме. Она зависит от напряжения сети и от тока возбуждения ротора.
При угле рассогласования θ= –90° двигатель находится на границе устойчивой работы.
При θ > −90o двигатель выпадает из синхронизма, скорость ро-
тора падает.
Перегрузочную способность двигателя легко регулировать током возбуждения. Номинальный момент соответствует углу рассогласо-
вания θ < −30o , что соответствует перегрузочной способности не
менее двух. Устойчивая работа синхронного двигателя возможна только на восходящем участке угловой характеристики.
Синхронный двигатель обладает свойством саморегулирования: при увеличении момента нагрузки увеличиваются угол рассогласования θ и, следовательно, электромагнитный вращающий момент, ко-
торый становится равным увеличенному моменту нагрузки; при уменьшении момента нагрузки соответственно уменьшаются угол θ и электромагнитный вращающий момент.
Контрольные вопросы
1. Если скорость вращения поля статора промышленного (f=50 Гц) синхронного генератора 750 об/мин, то ротор имеет:
1)одну пару полюсов;
2)две пары полюсов;
3)три пары полюсов;
4)четыре пары полюсов.
2.Генератор переменного тока имеет 32 пары полюсов и вращается с частотой 750 об/мин. Определить частоту переменного тока.
1)50 Гц; 2) 100 Гц; 3) 200 Гц; 4) 400 Гц.
189
3.Обмотка возбуждения, расположенная на роторе синхронной машины, подключается:
1) к источнику постоянного тока;
2) трехфазному источнику;
3) источнику однофазного синусоидального тока;
4) любому из перечисленных.
4.Внешней характеристикой синхронного генератора является зависимость:
1) Е=f(IВ); 2) IВ=f(I); 3) U=f(I); 4) I=f(IВ).
5.Если скорость вращения поля статора синхронной двухполюсной машины 3000 об/мин, то номинальная скорость вращения ротора:
1) 1000 об/мин; 2) 2000 об/мин; 3) 2940 об/мин; 4) 3000 об/мин.
6.На рисунке изображен ротор:
1)синхронной неявнополюсной машины;
2)синхронной явнополюсной машины;
3)двигателя постоянного тока;
4)асинхронного двигателя с короткозамк-
нутым ротором.
7. На роторе синхронной неявнополюсной машины:
1)располагается одна обмотка, выполненная изолированным про-
водом;
2)нет никакой обмотки;
3)располагается короткозамкнутая обмотка;
4)располагается трехфазная обмотка, выполненная изолированным проводом.
8.На рисунке изображена:
1)угловая характеристика синхронного двигателя;
2)механическая характеристика двигателя постоянного тока;
3)кривая КПД трансформатора;
4)механическая характеристика асинхронного двигателя.
190

 Z
Z9. МАШИНЫ ПОСТОЯННОГО ТОКА
Машины постоянного тока являются обратимыми машинами, т.е. они могут работать как в режиме генератора, так и в режиме двигателя.
Двигатели постоянного тока имеют преимущества перед двигателями переменного тока:
1)плавное регулирование частоты вращения;
2)больший пусковой момент.
Поэтому двигатели постоянного тока применяются в качестве тяговых двигателей на электротранспорте. Например, мощность двигателя трамвая составляет 40–45 кВт при напряжении питания 550 В; мощность двигателя электровоза или пригородного поезда составляет 150–200 кВт при напряжении питания 1500 В.
Мощность двигателей постоянного тока может быть от долей ватта (в схемах автоматики) до тысяч кВт (в прокатных станах).
По сравнению с машинами переменного тока машины постоянного тока:
1)имеют более сложную конструкцию и поэтому более дорогие;
2)являются более сложными в эксплуатации.
9.1.Устройство машин постоянного тока
Всостав машины постоянного тока входят (рис. 9.1): 1) индуктор (статор); 2) якорь;
3) щеточно-коллекторное устройство.
Индуктор – это неподвижная часть, предназначенная для созда-
ния магнитного поля машины (рис. 9.2), которое образуется за счет полюсных наконечников, представляющих собой электромагниты постоянного тока. На полюсных наконечниках расположены образующие обмотку возбуждения катушки, соединенные последовательно так, чтобы полюсы N и S чередовались.
Рассмотрим распределение магнитной индукции в зазоре вдоль поверхности якоря. Наибольшее значение индукция имеет под полюсами, между полюсами она равна нулю. Плоскости, проходящие между смежными полюсами, называются геометрическими нейтралями, а часть окружности между геометрическими нейтралями – полюсным делением.
192

Рис. 9.1. Устройство машины постоянного тока: 1 – коллектор; 2 – щетки; 3 – сердечник якоря; 4 – сердечник главного полюса; 5 – полюсная катушка; 6 – индуктор; 7 – подшипниковый щит; 8 – вентилятор; 9 – обмотка якоря
N
Линии геометрических нейтралей
S |
S |
N
Рис. 9.2. Индуктор машины постоянного тока
Якорь – это вращающаяся часть машины (см. рис 9.1). Сердечник якоря собирается из листов электротехнической стали, имеющих вид
193
дисков с вырезами, образующими при сборке пазы. В пазы укладывается обмотка, разделенная на секции. Витки одной секции соединяются с двумя пластинами, расположенными диаметрально противоположно. Пластины выполнены из меди и расположены по окружности якоря, образуя коллектор. Пластины изолированы друг от друга.
Щеточно-коллекторное устройство осуществляет скользящий контакт обмотки якоря с внешней цепью. При вращении якоря по коллектору скользят две графитовые щетки (см. рис. 9.1), установленные в специальные обоймы щеткодержателей диаметрально противоположно. Щетки прижимаются к коллектору спиральными или пластинчатыми пружинами. Щеткодержатели крепятся к траверсе, которую вместе со щетками можно поворачивать относительно индуктора на некоторый угол в ту или иную сторону.
9.2.Принцип действия машин постоянного тока
вразличных режимах работы
9.2.1. Режим двигателя
Принцип действия двигателей постоянного тока основан на возникновении механической силы, действующей на проводник с током, помещенный в магнитное поле.
При поданном на обмотки якоря и возбуждения напряжении по этим обмоткам протекает ток. Ток обмотки возбуждения создает магнитное поле машины (магнитный поток Ф). Взаимодействие тока якоря Iя с этим магнитным полем приводит к возникновению вращающего момента
М=СмФIя, |
(9.1) |
где См – постоянный коэффициент по моменту, зависящий от конструкции машины.
При вращении якоря в магнитном поле в обмотке якоря наводит-
ся ЭДС |
|
Е=СеФn, |
(9.2) |
где Се – постоянный коэффициент по ЭДС, зависящий от конструкции машины; Ф – магнитный поток; n – частота вращения якоря.
В режиме двигателя эта ЭДС направлена противоположно по отношению к приложенному напряжению (противоЭДС). Поэтому
уравнение электрического состояния цепи якоря имеет вид |
|
U=E+Iя Rя, |
(9.3) |
194 |
|
или
I я = |
U − Е |
, |
(9.4) |
|
|||
|
Rя |
|
|
где Rя – сопротивление якоря.
Из уравнения (9.4) видно, что ток якоря зависит не только от напряжения, но и от ЭДС. В режиме двигателя Uя>Е.
9.2.2. Режим генератора
Для получения режима генератора необходимо привести во вращение якорь машины постоянного тока. При вращении якоря в магнитном поле в обмотке якоря наводится ЭДС
Е=СеФn. (9.5)
Магнитный поток Ф зависит от величины тока возбуждения Iв. При подключении к обмотке якоря нагрузки напряжение на выходе генератора всегда меньше ЭДС якоря на величину падения напряжения в самом якоре IяRя.
Уравнение электрического состояния цепи якоря в режиме генератора имеет вид
U=E–IяRя. (9.6)
Взаимодействие тока якоря с магнитным полем машины приводит к появлению электромагнитного момента, который в режиме генератора будет тормозным.
9.3.Реакция якоря
Сувеличением электрической нагрузки на генератор и механической нагрузки на двигатель возрастает ток якоря.
Реакция якоря – это воздействие тока якоря на систему возбуждения машины. При этом происходит искажение магнитного поля машины, проявляющееся обычно в уменьшении магнитного потока машины Ф.
Действие реакции якоря обуславливает необходимость увеличения тока возбуждения с ростом нагрузки для того, чтобы поддерживать неизменным магнитный поток машины Ф.
Для уменьшения реакции якоря машины постоянного тока снабжаются дополнительными полюсами, которые устанавливаются на станине машины по линии геометрической нейтрали. Обмотки дополнительных полюсов соединяются через щетки последовательно с
195
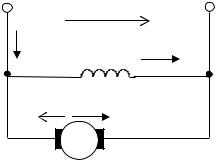
обмоткой якоря так, чтобы направление вектора напряженности магнитного поля от дополнительных полюсов было противоположно направлению вектора напряженности магнитного поля, возникающего из-за реакции якоря. Тем самым компенсируется действие реакции якоря.
Так как магнитное поле дополнительных полюсов создается током якоря, компенсация реакции якоря происходит автоматически при любых нагрузках машины.
9.4. Классификация машин постоянного тока по способу возбуждения
В зависимости от способа соединения обмотки якоря с обмоткой возбуждения различают машины постоянного тока:
–с независимым возбуждением;
–с параллельным возбуждением;
–с последовательным возбуждением;
–со смешанным возбуждением.
Иногда в машинах постоянного тока малой мощности вместо обмоток возбуждения используются постоянные магниты.
9.5.Характеристики двигателя постоянного тока
спараллельным возбуждением
Электрическая принципиальная схема двигателя постоянного тока с параллельным возбуждением изображена на рис. 9.3. Напряжение
+ |
U |
|
– |
U приложено одновременно |
к об- |
I |
|
Iв |
|
мотке якоря и обмотке возбуждения. |
|
Rв |
|
U=Uя. |
(9.7) |
||
|
|
|
|
Параллельная обмотка возбуж- |
|
|
Е Iя |
|
|
дения выполняется тонким прово- |
|
|
|
|
|
дом со значительным числом вит- |
|
|
Rя |
|
|
ков. |
|
|
|
|
При поданном на обмотки якоря |
||
Рис. 9.3. Схема электриче- |
|
и возбуждения напряжении U по |
|||
ская принципиальная |
|
этим обмоткам протекают токи Iя и |
|||
двигателя постоянного тока |
|
Iв соответственно. |
|
||
|
с параллельным |
|
Согласно первому закону Кирх- |
||
|
возбуждением |
|
гофа |
|
|
|
|
|
|
196 |
|


n |
|
|
|
|
|
|
Се |
|
= 0,105 . |
(9.15) |
||||
n0 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
См |
||||||||
nн |
|
|
|
|
|
|
|
|
уравнения |
|||||
|
|
|
После подстановки из |
|||||||||||
|
|
(9.15) в (9.14) имеем |
|
|
||||||||||
|
|
|
|
n = |
|
U |
|
0,105 М R |
я |
, (9.16) |
||||
|
М |
|
|
|
− |
|
|
|||||||
0 |
|
|
СеФ |
|
( СеФ)2 |
|
||||||||
Мн |
где |
n0 = |
U |
|
– частота вращения иде- |
|||||||||
|
|
|||||||||||||
Рис. 9.5. График механической |
СеФ |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
характеристики двигателя |
ального |
|
|
|
холостого |
|
хода; |
|||||||
|
|
|
|
|
|
|||||||||
∆n = 0,105 М Rя – уменьшение частоты вращения при увеличении на-
( СеФ)2
грузочного момента.
Механическая характеристика двигателя постоянного тока с параллельным возбуждением строится по двум точкам:
1) n=n0, М=0; 2) n=nн, М=Мн.
Для расчета номинального момента обычно пользуются уравнением
Мн = 9550 |
Р2н |
, |
(9.17) |
|
|||
|
nн |
|
|
где Р2н – номинальная мощность на валу двигателя, кВт.
В момент пуска двигателя (когда n=0) согласно уравнению (9.2)
Е=0, следовательно, в соответствии с уравнением (9.10) |
|
|||||
|
|
|
|
I яп = U . |
(9.18) |
|
+ |
|
U |
– |
Ток Iяп |
Rя |
|
I |
|
Iв |
|
достигает больших |
||
Rв |
|
значений, так как сопротивление |
||||
|
|
|||||
|
|
|
|
якоря Rя очень мало (доли Ома). |
||
|
Е |
Iя |
|
Для ограничения Iяп в цепь |
||
|
|
|
|
якоря на время пуска вводят пус- |
||
|
Rя |
Rд |
|
ковое сопротивление Rд (рис. 9.6), |
||
|
|
которое по мере разгона двигате- |
||||
Рис. 9.6. Схема электрическая |
|
ля выводят из цепи якоря. |
|
|||
принципиальная двигателя |
|
При введении в цепь якоря |
||||
|
постоянного тока |
|
добавочных |
сопротивлений |
уве- |
|
с параллельным возбуждением |
|
личивается |
наклон механических |
|||
с добавочным сопротивлением |
|
характеристик (рис. 9.7). |
|
|||
|
в цепи якоря |
|
|
|||
|
|
|
|
|
||
|
|
|
|
198 |
|
|



Поэтому магнитный поток Ф является некоторой функцией тока якоря Iя. Характер этой функции изменяется в зависимости от нагрузки на валу двигателя.
Двигатели постоянного тока с последовательным возбуждением рассчитаны на работу с номинальной нагрузкой в насыщенной области характеристики намагничивания.
Двигатели, работающие в ненасыщенной области характеристики, имеют повышенные габариты.
Так как обмотка якоря двигателя с последовательным возбужде- n нием включена последовательно с обмоткой возбуждения, то уравнение электрического состояния дви-
гателя будет иметь вид
U=E+Iя(Rя+Rв). (9.23)
Из уравнения (9.5) с учетом
(9.23)
Iя |
n = |
U − I я( Rя |
+ Rв ) |
. (9.24) |
||
Рис. 9.13. График скоростной |
СеФ |
|
|
|||
|
|
|
|
|||
Это уравнение является уравне- |
||||||
характеристики двигателя |
нием скоростной характеристики |
|||||
постоянного тока с |
||||||
двигателя постоянного тока с после- |
||||||
последовательным возбуждением |
||||||
|
довательным возбуждением. |
|||||
n |
На рис. 9.13 показан график |
|||||
|
скоростной характеристики n=f3(Iя). |
|||||
|
В отличие от двигателя с парал- |
|||||
|
лельным возбуждением у двигателя |
|||||
|
с последовательным |
возбуждением |
||||
магнитный поток не является вели-
|
М |
|
чиной постоянной. |
|
||||
Рис. 9.14. График механической |
|
Из уравнения (9.1) |
|
|||||
|
I я = |
М |
. |
(9.25) |
||||
характеристики двигателя |
|
|||||||
|
|
|||||||
постоянного тока с |
|
|
|
СМФ |
|
|||
|
Произведем |
подстановку из |
||||||
последовательным возбуждением |
|
|||||||
ние (9.24): |
|
уравнений (9.25) |
и (9.15) |
в уравне- |
||||
|
0,105 М ( Rя + Rв ) |
|
|
|
|
|||
n = |
U |
|
− |
. |
|
|
(9.26) |
|
СеФ |
|
|
|
|||||
|
|
( СеФ)2 |
|
|
|
|||
202

Уравнение (9.26) является уравнением механической характеристики двигателя постоянного тока с последовательным возбуждением.
На рис. 9.14 представлен график этой характеристики. Из графика видно, что механическая характеристика двигателя с последова-
тельным возбуждением |
является |
|
|
– |
|
«мягкой». При малых |
нагрузках + |
|
U |
||
|
|
||||
частота вращения n резко возраста- |
|
|
|
||
ет (двигатель идет «вразнос»). По- |
|
Rд |
|
||
этому эти двигатели без нагрузки на |
Е |
|
|||
Iя=Iв |
|
||||
валу включать нельзя. |
|
|
|||
|
|
|
|
||
Несмотря на этот недостаток, |
Rя |
Rв |
|
||
такие двигатели применяются в |
|
||||
электроприводах с тяжелыми усло- |
Рис. 9.15. Схема электрическая |
||||
виями пуска, работающих при из- |
принципиальная двигателя |
|
|||
менениях нагрузочного |
момента |
постоянного тока с |
|
||
в широких пределах. В этом слу- |
последовательным возбуждением |
||||
с добавочным сопротивлением |
|||||
чае выбирается режим работы, при |
|||||
|
|
|
|||
котором величина магнитного потока близка к значению насыщения. Пусковой ток
Iп = |
|
|
U |
, |
(9.27) |
R |
я |
+ R |
|||
|
|
в |
|
|
несмотря на включенную последовательно с обмоткой якоря обмотку возбуждения, достигает весьма больших значений.
n
Rд=0
Rд1>0
Rд2> Rд1 |
М |
Мн
Рис. 9.16. Графики механических характеристик двигателя при введении в цепь якоря и обмотки возбуждения добавочных сопротивлений
203

Для ограничения Iп в цепь якоря и обмотки возбуждения на время пуска вводят пусковое сопротивление Rд (рис. 9.15), при этом пусковой ток уменьшается до величины, равной
Iп = |
|
|
U |
|
. |
(9.28) |
R |
я |
+ R |
+ R |
|||
|
|
в |
д |
|
||
По мере разгона двигателя пусковое сопротивление ступенчато уменьшают. Графики механических характеристик двигателя при введении в цепь якоря и обмотки возбуждения добавочных сопротивлений представлены на рис. 9.16.
Для построения искусственных механических характеристик двигателя с последовательным возбуждением пользуются универсальными характеристиками n=f4(I) и M=f5(I), которые даются заводомизготовителем на основании опытных данных для серии выпускаемых двигателей.
За 100% в графиках данных характеристик взяты номинальные величины момента на валу двигателя, частоты вращения и тока.
9.8. Регулирование частоты вращения двигателя постоянного тока с последовательным возбуждением
Как и в двигателях с параллельным возбуждением, в двигателях с последовательным возбуждением применяется три способа регулирования частоты вращения:
– введением добавочного сопротивления в цепь якоря и обмотки возбуждения;
– изменением магнитного потока Ф;
– изменением подводимого напряжения.
+ |
U |
– |
При введении добавочных сопро- |
|||
тивлений в цепь якоря и обмотки воз- |
||||||
|
|
|
||||
|
Rр |
|
буждения (см. рис. 9.15) получаются |
|||
|
|
|
искусственные |
механические |
характе- |
|
Е Iя |
Iш |
|
ристики. При одном и том же моменте |
|||
|
Rв |
|
большему значению добавочного со- |
|||
|
|
|
противления |
соответствует |
меньшее |
|
Rя |
Iв |
|
значение частоты вращения (см. рис. |
|||
Рис. 9.17. Регулирование |
|
9.16). |
|
|
||
|
Недостатками такого способа регу- |
|||||
частоты вращения |
|
|||||
изменением магнитного |
|
лирования, как и для двигателя с па- |
||||
|
потока |
|
раллельным возбуждением, являются: |
|||
|
|
|
204 |
|
|
|

1)большие потери мощности в регулировочном сопротивлении;
2)регулирование частоты вращения ступенчатое, а не плавное;
3)уменьшение жесткости механических характеристик.
Более экономичным является регулирование частоты вращения
изменением магнитного потока Ф. В этом случае регулировочным реостатом шунтируют обмотку возбуждения (рис. 9.17), вследствие чего ток обмотки возбуждения уменьшается и, следовательно, уменьшается магнитный поток, а частота вращения увеличивается
(рис. 9.18).
n
Iв2<Iв1
1 |
n2 |
2 |
|
||
|
|
|
|
n1 |
|
Iв1=Iя
M
Рис. 9.18. Механические характеристики при регулировании частоты вращения изменением магнитного потока: 1 – естественная механическая характеристика; 2 – искусственная механическая характеристика при шунтировании обмотки возбуждения сопротивлением Rр
n  U1>U2
U1>U2
n1
n2 
U2 |
M |
|
Рис. 9.19. Механические характеристики при регулировании частоты вращения изменением подводимого к якорю напряжения
205

Однако верхний предел регулирования частоты вращения ограничен механической прочностью машины.
Регулирование частоты вращения изменением подводимого напряжения U возможно только путем снижения его величины. При уменьшении подводимого напряжения происходит уменьшение частоты вращения. Механические характеристики в этом случае имеют вид, представленный на рис. 9.19.
9.9. Характеристики двигателя постоянного тока со смешанным возбуждением
смешанным возбуждением |
Последовательную обмотку вклю- |
|||
чают согласно с параллельной обмот- |
||||
кой так, чтобы их намагничивающие силы складывались. |
||||
+ |
U |
– |
Электрическая |
принципиальная |
I Iв1 |
|
схема двигателя постоянного тока со |
||
|
|
|
смешанным возбуждением представле- |
|
Rв1 |
|
|
на на рис. 9.20. |
|
Rр |
|
У двигателей со смешанным воз- |
||
Е |
Iя=Iв2 |
|
буждением имеются две обмотки воз- |
|
|
|
|
буждения, включенные последователь- |
|
Rя |
Rв2 |
Rд |
но и параллельно якорю. Основной об- |
|
Рис. 9.20. Схема электрическая |
моткой возбуждения считается та, ко- |
|||
торая создает не менее 70% всей на- |
||||
принципиальная двигателя по- |
магничивающей силы. |
|
||
стоянного тока со |
|
|
||
n
2
4
3
n0
1
Мн М
Рис. 9.21. Механические характеристики двигателя с параллельным (1), последовательным (2) и смешанным (3,4) возбуждением
206

Вэтом случае двигатель приобретает свойства и характеристики, являющиеся средними между свойствами и характеристиками двигателей с параллельным и последовательным возбуждением.
Взависимости от соотношения магнитных потоков параллельной
ипоследовательной обмоток механическая характеристика двигателя со смешанным возбуждением расположена ближе к характеристике 1 или к характеристике 2 (рис. 9.21).
Одним из достоинств двигателя со смешанным возбуждением является то, что он, обладая «мягкой» механической характеристикой, может работать на холостом ходу, так как частота вращения холостого хода n0 имеет конечное значение.
9.10.Генераторные и тормозные режимы работы двигателя постоянного тока с параллельным возбуждением
Одним из режимов работы машины постоянного тока является тормозной, когда электромагнитный момент направлен в сторону, противоположную по отношению к вращению якоря.
Различают три способа торможения двигателя постоянного тока:
–рекуперативное;
–динамическое;
–противовключением.
Рекуперативное торможение является наиболее экономичным по сравнению с остальными.
n
Рекуперативное n0 торможение nн
Генераторный |
Двигательный |
режим |
режим |
-М |
М |
|
|
0 |
Мн |
Рис. 9.22. Механическая характеристика, иллюстрирующая рекуперативное торможение
207

Данный способ торможения возникает в том случае, когда момент сопротивления приводного механизма совпадает по направлению с электромагнитным вращающим моментом двигателя. В этом случае частота вращения якоря возрастает, достигает частоты холостого хода n0 и, увеличиваясь далее, обусловливает переход машины из двигательного режима в генераторный (рис. 9.22). В этом режиме ЭДС, наводимая в якоре, становится больше напряжения сети U. При этом двигатель не только забирает энергию из сети, но и отдает энергию в сеть (рекуперирует). Показателем смены режима работы машины является изменение направления тока якоря при сохранении направления тока в обмотке возбуждения:
|
U − E |
= −I я . |
(9.29) |
|
|||
|
Rя |
|
|
Согласно уравнению (9.1) М=СмФIя. Из уравнения видно, что при изменении направления тока якоря изменяется направление вращающего момента. Он становится тормозным.
Примерами работы двигателя в этом режиме являются режимы работы двигателей в грузоподъемных механизмах при спуске легких грузов или режимы работы двигателей на электротранспорте при его движении под уклон (например, трамвай движется под уклон).
Уравнение механической характеристики двигателя, работающего в режиме рекуперативного торможения, имеет вид
|
|
|
n = |
U |
|
+ |
0,105 М Rя . |
|
(9.30) |
|
|
|
|
СеФ |
|
( СеФ)2 |
|
|
|
|
|
|
|
|
|
|
Достоинством рекуперативного |
||
+ |
|
U |
– |
торможения является возврат элек- |
|||||
I |
|
Iв |
|
|
трической энергии от машины обрат- |
||||
Rв |
|
|
но в сеть. |
|
|
||||
|
|
|
|
|
|||||
|
|
|
|
|
|
|
Динамическое торможение (рис. |
||
|
Е |
Iя |
|
|
9.23) возникает |
после отключения |
|||
ЛК |
|
|
ЛК |
|
якорной обмотки машины от сети ра- |
||||
|
Rя |
Iят |
|
|
змыканием контактов ЛК и подклю- |
||||
КТ |
|
|
чения ее к сопротивлению динамиче- |
||||||
|
|
Rдт |
|
|
ского торможения Rдт контактами КТ, |
||||
|
|
|
|
причем обмотка возбуждения остает- |
|||||
Рис. 9.23. Схема включения |
|
||||||||
|
ся подключенной к сети. |
|
|||||||
двигателя при динамическом |
|
|
|
Согласно |
уравнению |
(9.4) |
|||
|
торможении |
|
|
|
|
|
|
|
|
208

I я = U − Е . При отключении якорной обмотки машины от сети (U=0)
Rя
и подключении к ней сопротивления Rдт ток якоря в начале торможения оказывается равным
I янт = |
− Ен |
, |
(9.31) |
|
|||
|
Rя + Rдт |
|
|
т.е. машина переходит в генераторный режим, при этом ток якоря изменяет направление. Поэтому согласно уравнению (9.1) изменяет направление и вращающий момент. Он становится тормозным. Величина тормозного момента в начале торможения
Мнт=СмФIянт, |
(9.32) |
где Iянт – ток якоря в момент начала торможения.
Чем больше Rдт, тем меньше ток Iянт и, следовательно, меньше Мнт и больше время торможения. Таким образом, время торможения определяется величиной сопротивления Rдт.
Rдт1>0 Rдт2>Rдт1 n
n0 nн 
-М |
М |
Мнт1 Мнт2 0 |
Мн |
Рис. 9.24. Графики механической характеристики двигателя
в режиме динамического торможения при различной величине Rдт: Мнт1, Мнт2 – моменты начала торможения
Уравнение механической характеристики двигателя в режиме динамического торможения имеет вид
n = |
0,105 М ( Rя + Rдт ) |
. |
(9.33) |
|
|||
|
( СеФ)2 |
|
|
Графики механической характеристики двигателя в режиме динамического торможения при различной величине Rдт представлены на рис. 9.24. Режим динамического торможения используется для быстрой остановки двигателя, работающего с большой нагрузкой на валу. При завершении динамического торможения двигатель останав-
209
ливается. Достоинством динамического торможения является простота его осуществления.
Торможение противовключением возникает после смены полярности напряжения, приложенного к обмотке якоря (рис. 9.25).
+ |
|
U |
– |
Механическая характеристика дви- |
|
|
гателя для этого случая приведена на |
||||
I |
Rв |
|
Iв |
рис. 9.26. При работе машины в двига- |
|
|
|
тельном режиме замкнуты контакты ЛК |
|||
|
|
|
|||
|
|
|
|
и разомкнуты контакты КТ (см. рис. |
|
КТ |
|
|
ЛК |
9.25). Электромагнитный момент явля- |
|
|
|
|
ется вращающим. При размыкании кон- |
||
|
|
|
|
тактов ЛК и замыкании контактов КТ |
|
|
Iя |
Iят |
Rдт |
ток якоря меняет направление, за счет |
|
|
чего электромагнитный момент стано- |
||||
|
|
|
|
||
|
Е |
Rя |
|
вится тормозным. |
|
ЛК |
|
|
КТ |
После торможения двигатель оста- |
|
|
|
навливается (n=0 в точке N на рис. |
|||
|
|
|
|
||
Рис. 9.25. Схема включения |
9.26). Если в этот момент времени дви- |
||||
гатель не будет отключен от сети, то |
|||||
двигателя при торможении |
|||||
электромагнитный момент вновь стано- |
|||||
противовключением |
|||||
вится вращающим и двигатель начинает |
|||||
|
|
|
|
||
разгоняться в обратном направлении.
Режим торможения противовключением (режим электромагнитного тормоза) может возникнуть также при работе двигателя, если к валу двигателя приложить достаточно большой тормозной момент, при котором двигатель начинает вращаться в обратную сторону.
|
|
n |
|
|
|
|
n0 |
|
|
|
|
nн |
|
Rя |
|
Тормозной |
|
||
|
|
Двигательный режим |
||
|
режим |
|
||
|
|
|
|
|
|
|
|
Rя+Rдт |
М |
-М |
|
|||
|
N |
0 |
Мн |
|
Двигательный режим после реверса
-n0
Рис. 9.26. Механическая характеристика двигателя при торможении противовключением
210

Торможение противовключением возникает при работе двигателя, например, в грузоподъемных механизмах при спуске тяжелых грузов. В этом случае двигатель включается на подъем, электромагнитный момент становится тормозным (рис. 9.27), а вращение осуществляется за счет сторонних сил (под действием силы тяжести груза).
n |
|
n0 |
Двигательный |
|
режим |
|
Rд1 |
Rд3 Rд2
а а' M
Режим b' электромагнитного b
тормоза
Рис. 9.27. Механические характеристики двигателя в режиме торможения противовключением
при разных сопротивлениях в цепи якоря: Rд3> Rд2> Rд1
При этом ЭДС, наводимая в якоре, меняет свое направление по отношению к двигательному режиму, а ток якоря равен
I я = |
U + E |
, |
(9.34) |
|
|||
|
Rя + Rдт |
|
|
где Rдт – дополнительное сопротивление, которое необходимо включить в цепь якоря, чтобы ограничить ток.
9.11.Коэффициент полезного действия двигателя
ипотери мощности
Коэффициент полезного действия двигателя определяется по формуле
η = |
Р2 |
100% , |
(9.35) |
|
Р |
||||
|
|
|
||
|
1 |
|
|
211
где Р1 – мощность, подводимая к двигателю из сети; Р2 – полезная мощность на валу двигателя.
Р1 = Р2 + ∑∆Р, |
(9.36) |
где ∑∆Р – суммарные потери мощности.
Потери мощности можно разделить на постоянные и переменные. Постоянные потери мощности – это такие потери, величина которых не зависит от нагрузки на валу двигателя. К постоянным поте-
рям относятся:
–механические потери;
–потери в стали;
–добавочные потери.
К механическим потерям ∆Рмех относятся потери, обусловлен-
ные трением в подшипниках, трением щеток по коллектору; трением якоря в воздухе и вентиляционным действием при вращении якоря и вентилятора двигателя, если он имеется.
∆Рмех = ( 2 − 4 )% Р1 . |
(9.37) |
Потери в стали (электромагнитные потери) ∆Рст обусловлены
перемагничиванием материала сердечника (железа) якоря и вихревыми токами. Потери при перемагничивании материала сердечника пропорциональны площади петли гистерезиса, частоте перемагничивания (частоте вращения якоря) и максимальной величине индукции. Потери на вихревые токи пропорциональны частоте перемагничивания и квадрату магнитной индукции.
∆Рст = (1 − 2 )% Р1. |
(9.38) |
К добавочным потерям ∆Рдоб относятся потери в полюсных на-
конечниках, обусловленные пульсациями магнитного поля из-за наличия зубцов якоря, и другие трудноопределимые потери.
∆Рдоб ≈1% Р1. |
(9.39) |
Переменные потери мощности – это потери, величина которых зависит от тока в обмотках якоря и возбуждения. К таким потерям от-
носятся электрические потери ∆Рэ . |
|
|
|
|
|
|
∆Рэ = ∆Ря |
+ ∆Рв, |
|
|
(9.40) |
||
где ∆Ря – потери мощности в обмотке якоря; ∆Рв |
– потери мощно- |
|||||
сти в обмотке возбуждения. |
|
|
|
|
|
|
∆Ря = I я2 Rя ; |
|
|
(9.41) |
|||
∆Р |
= I 2 R |
= I |
U |
в |
. |
(9.42) |
в |
в в |
в |
|
|
|
|
Обычно
212


Iян=Iн–Iв=20,5–0,85=19,65 А.
2. Потери в обмотке якоря и в цепи возбуждения
∆Рян = Rя I я2н = 0,75 19,652 = 290 Вт;
∆Рв = Rв Iв2 = 258 0,852 =186 Вт. 3. Магнитные и механические потери
∆Рм+∆Рмех=Р0–∆Ря0–∆Рв,
где Р0 – потребляемая двигателем мощность в режиме холостого хода; ∆Ря0 – потери в обмотке якоря в режиме холостого хода.
Р0=Uн·I0=220·2,35=517 Вт;
∆Ря0=Rя(I0–Iв)2=0,75(2,35–0,85)2=1,7 Вт; ∆Рмех+∆Рм=Р0–∆Ря0–∆Рв=517–1,7–186=329,3 Вт; ∑∆Р=290+186+329,3=805,3 Вт;
Р2н = Р1н −∑∆Р=4510–805,3=3704,7 Вт=3,71 кВт.
4. Номинальный КПД
ηн = Р2н 100% = 3,71 100% = 82,2% . Р1н 4,50
5. Номинальный вращающий момент
Мн = 9550 Р2н = 9550 3,71 = 34,6 Н·м. nн 1025
6. Пусковой ток якоря двигателя при пуске без реостата
I яп = |
U н |
= |
220 |
= 293 А. |
|
0,75 |
|||
|
Rя |
|
||
7. Сопротивление пускового реостата Rр определим из уравнения
I яп = 2,5 I ян = RяU+нRр ,
откуда Rр = 2,5U нI ян − Rя = 2,522019,65 −0,75 = 3,73 Ом.
8. Определим пусковой момент двигателя при пуске с реостатом. Известно, что вращающий момент двигателя М=СмФIя.
Для режима номинальной нагрузки Мн=СмФIян; для режима пуска Мп=СмФIяп.
Считая магнитный поток постоянным, имеем |
Мн |
= |
I ян |
, |
|
||||
|
Мп |
|
I яп |
|
214

откуда Мп = Мн |
|
I яп |
= 34,6 |
2,5 19,65 |
=86,5 Н·м. |
|
|
|
|
|
|
I ян |
19,65 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
9. Естественная механическая характеристика (рис. 9.29) соглас- |
||||||||||
но уравнению |
механической характеристики |
n = |
U |
− |
0,105 М Rя |
|||||
СеФ |
( СеФ)2 |
|
||||||||
представляет собой прямую линию, которая строится по двум точкам с координатами: 1) М=0, n0; 2) Мн, nн.
n, об
мин |
|
|
|
|
|
1100 |
|
|
|
1 |
|
1000 |
|
|
|
|
|
900 |
|
|
|
|
|
800 |
|
|
|
|
|
700 |
|
|
|
|
|
600 |
|
|
|
2 |
|
500 |
|
|
|
|
|
400 |
|
|
|
|
|
300 |
|
|
|
|
|
200 |
|
|
|
|
|
100 |
|
|
|
|
М, Н·м |
0 |
|
|
|
|
|
10 |
20 |
30 |
40 |
50 |
60 |
Рис. 9.29. Механические характеристики двигателя: 1 – естественная; 2 – искусственная
Координаты первой точки относятся к режиму идеального холостого хода. Частота вращения идеального холостого хода
n0 = |
U н |
= |
U нnн |
= |
220 1025 |
=1100 |
об |
, |
СеФ |
|
205 |
мин |
|||||
|
|
Ен |
|
|
||||
где Ен=Uн–Iян·Rя=220–19,65·0,75=205 В.
Координаты второй точки относятся к номинальному режиму
Мн=34,6 Н·м; nн=1025 миноб .
Искусственная механическая характеристика (см. рис. 106), как и естественная, строится по двум точкам с координатами: 1) М=0, n0; 2)
Мн, nн.
215

Для построения искусственной механической характеристики необходимо рассчитать частоту вращения якоря при введенном в цепь якоря дополнительном сопротивлении и номинальном моменте на валу. Этот расчет можно произвести по уравнению скоростной характеристики
|
|
nн = |
Uн − I ян( Rя + Rд ) |
, |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
СеФ |
|
|
|
|
|
|
|
|
|
|
где |
U н |
− I янRя |
|
|
|
220 −19,65 0,75 |
|
|
|
|
|
|
|
|||
СеФ = |
= |
|
= 0,2 |
В |
мин |
; |
||||||||||
|
nн |
1025 |
|
|
|
|
|
об |
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
nн = |
220 −19,65( 0,75 +3,73 ) |
= 660 |
об |
. |
|
|
||||||||||
|
|
|
0,2 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
мин |
|
|
||||
9.12.2.Пример расчета двигателя постоянного тока
споследовательным возбуждением
Двигатель постоянного тока с последовательным возбуждением работает от сети напряжением Uн=220 В. Номинальный вращающий
момент Мн=75 Н·м, номинальная частота вращения nн=1020 миноб ; со-
противление обмотки якоря Rя=0,4 Ом; сопротивление обмотки возбуждения Rв=0,3 Ом; номинальный КПД ηн=81,5%.
Определить: 1) номинальную мощность на валу двигателя и мощность, потребляемую из сети при номинальной нагрузке; 2) номинальный ток двигателя; 3) противоЭДС и электромагнитную мощность (мощность, передаваемую на якорь); 4) потери в двигателе при номинальной нагрузке и сопротивление пускового реостата, при котором пусковой ток превышает номинальный в 2 раза.
Решение.
1.Номинальная мощность на валу двигателя
Р2н = М9550н nн = 7595501020 = 8 кВт.
2.Потребляемая мощность
Р |
= |
Р2н |
= |
8 |
= 9,8 кВт. |
|
0,815 |
||||
1н |
|
ηн |
|
||
3. Номинальный ток двигателя
216

Iн = |
Р1н |
= |
9,8 1000 |
= 44,5 А. |
|
U н |
220 |
||||
|
|
|
Найденный ток является током обмоток якоря и возбуждения
Iя н=Iв=44,5 А.
4. ПротивоЭДС, наводимая в обмотке якоря,
Е=Uн– (Rя+Rв)·Iн=220–(0,4+0,3)·44,5=188,8 В. 5. Электромагнитная мощность
Рэм=Е·Iн=188,8·44,5=8400 Вт=8,4 кВт. 6. Магнитные и механические потери
∆Рм+∆Рмех=Рэм–Р2н=8,4–8=0,4 кВт. 7. Потери в обмотках якоря и возбуждения:
∆Рян = Rя I я2н = 0,4 44,52 = 792Вт;
∆Рв = Rв Iв2 = 0,3 44,52 = 595 Вт.
8.Суммарные потери мощности в двигателе
∑∆Рн = Р1н − Р2н = 9,8 −8 =1,8 кВт.
9.Сопротивление пускового реостата
Rр = |
U н |
−( Rя + Rв ) = |
220 |
−( 0,4 + 0,3 ) =1,77 Ом. |
|
2 44,5 |
|||
|
2I ян |
|
||
Контрольные вопросы
1.В чем преимущество двигателей постоянного тока перед асинхронными двигателями:
1) возможность плавного регулирования частоты вращения и наличие большого пускового момента;
2) наличие малого пускового момента;
3) более простые в эксплуатации?
2.Найти ЭДС, наводимую в обмотке якоря двигателя постоянного тока, если частота вращения двигателя n=1000 миноб , магнитный
поток Ф=2,0·10-2 Вб, а постоянная машины Се=10. 1) 100 В; 2) 20 В; 3) 200 В; 4) 10 В.
3. Ток якоря двигателя постоянного тока увеличился в 2 раза. Как изменился вращающий момент двигателя с параллельным возбуждением:
1) не изменился; 2) увеличился в 2 раза; 3) уменьшился в 2 раза?
217

4.Двигатель постоянного тока с параллельным возбуждением
имеет следующие паспортные данные: напряжение Uн=220 В; номинальный ток Iн=10 А; ток возбуждения Iв=2 А; сопротивление якоря Rя=1,0 Ом. Чему равна ЭДС якоря Е:
1) 212 В; 2) 100 В; 3) 424 В; 4) 112 В?
5.При постоянном напряжении магнитный поток обмотки возбуждения двигателя постоянного тока уменьшился. Как изменилась частота вращения двигателя?
1) увеличилась; 2) не изменилась; 3) уменьшилась?
6.Как изменится частота вращения двигателя постоянного тока с увеличением сопротивления R2:
|
U |
+ |
– |
|
|
|
|
|
|
1) |
увеличится; |
|
|
|
|
|
|
2) |
уменьшится; |
|
|
|
|
|
|
||
|
Rв |
|
|||||
|
R2 |
||||||
|
3) |
останется неизменной? |
|||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rя R1
7. Как изменится частота вращения двигателя постоянного тока при уменьшении сопротивления R1:
|
U |
|
|
+ |
– |
1) увеличится; |
|
|
|
2) |
уменьшится; |
Rв |
R2 |
3) |
останется неизменной? |
|
|
||
Rя R1
8. Частота вращения двигателя постоянного тока уменьшилась с 3000 миноб до 1500 миноб . Как изменилась ЭДС обмоток якоря, если магнитный поток остался неизменным:
1)уменьшилась в 2 раза;
2)увеличилась в 2 раза;
3)осталась неизменной?
218

9.Ток в обмотке якоря двигателя постоянного тока изменился от тока холостого хода до номинального значения. В каком случае ЭДС, наводимая в обмотке якоря машины, имела максимальное значение:
1) в режиме холостого хода;
2) в номинальном режиме;
3) ЭДС не зависит от режима работы?
10.Почему в момент пуска двигателя постоянного тока пусковой ток двигателя в несколько раз превышает номинальный ток:
1) ЭДС, наводимая в якоре в момент пуска, равна 0; 2) сопротивление якоря при пуске меньше, чем в номинальном режиме?
11.Определить пусковой ток двигателя параллельного возбуждения, если двигатель работает при U=110 В; Rя=2,5 Ом; Iв=1 А.
|
+ |
|
|
U |
− |
|
1) 50 А; |
|
|
|
|
||
Iп |
Iв |
|
||||
2) 45 А; |
|
|||||
|
|
|
|
|
|
|
3) 10 А; |
|
|
|
Rв |
|
|
4) 25 А. |
|
|
|
Iя |
|
|
|
|
|
|
Rя |
|
|
|
|
|
|
|
|
|
12. Какое из приведенных уравнений соответствует уравнению механической характеристики двигателя постоянного тока:
1) |
M = Cм Ф I я ; 2) n = |
U − I я Rя |
; 3) |
n = |
U |
− |
0,105 М Rя |
? |
|
Cе Ф |
|
||||||
|
|
Се Ф |
|
|
(Се Ф)2 |
|||
13. Какому режиму работы соответствует участок вг механической характеристики двигателя постоянного тока с параллельным
возбуждением:
n
1) двигательному режиму; |
г |
|
в |
|
2) генераторному режиму с ре- |
|
|
||
куперацией энергии в сеть; |
|
|
|
|
3) режиму динамического тор- |
|
|
|
|
можения? |
|
|
a |
M |
|
|
0 |
|
|
|
|
|
|
|
219 |
|
|
|
|
14.Частота вращения двигателя постоянного тока n уменьшилась. Как изменилась при этом ЭДС, наводимая в обмотке якоря двигателя:
1) не изменилась;
2) увеличилась;
3) уменьшилась;
4) в двигателе ЭДС не индуктируется?
15.В каких соотношениях находятся величины добавочных сопротивлений, вводимых в цепь якоря двигателя, на приведенных графиках механических характеристик:
n |
|
n0 |
1) Rд1>Rд2>Rд3; |
Rя+Rд1 |
|
Rя+Rд2 |
2) Rд1=Rд2=Rд3; |
Rя+Rд3 |
3) Rд1<Rд2<Rд3? |
M |
|
Mн |
|
16. Какому режиму работы двигателя постоянного тока с параллельным возбуждением соответствует участок вг на механической характеристике двигателя:
n |
|
1) двигательному режиму; |
а |
|
|
|
2) генераторному режиму с ре- |
|
в |
|
куперацией энергии в сеть; |
д |
г |
3) режиму динамического тор- |
|
можения? |
|
|
|
|
|
|
M |
17. В каком режиме будет работать двигатель с параллельным возбуждением, если частота вращения якоря (под действием внешних причин) окажется выше частоты вращения идеального холостого хода:
1)генераторный режим с рекуперацией энергии в сеть;
2)режим динамического торможения;
3)режим торможения противовключением?
220

18. Для какого типа двигателя приведен график механической характеристики:
1) асинхронного двигателя; |
n |
2)двигателя постоянного тока с последовательным возбуждением;
3)двигателя постоянного тока с
параллельным возбуждением? |
M |
19.Что произойдет, если двигатель постоянного тока с последовательным возбуждением подключить к сети при отключенной механической нагрузке на валу:
1) двигатель не запустится;
2) обмотка якоря перегреется;
3) двигатель пойдет «вразнос»?
20.Двигатель постоянного тока с параллельным возбуждением имеет следующие паспортные данные: мощность на валу Р2н=6,0 кВт;
Uн=220 В; Iн=32 А; nн=1000 миноб .
Определить коэффициент полезного действияηн и номинальный вращающий момент Мн.
1)ηн=0,65; Мн=63,7 Н·м;
2)ηн=0,85; Мн=114,7 Н·м;
3)ηн=0,85; Мн=57,3 Н·м;
4)ηн=0,95; Мн=120,3 Н·м.
21. Двигатель постоянного тока с последовательным возбуждением имеет следующие паспортные данные: U=220 В, Iном=160 А, КПД η=86%. Определить потребляемую мощность Р1 и мощность на
валу Р2.
1) Р1=35200 Вт; Р2=30272 Вт; 2) Р1=35200 Вт; Р2=29046 Вт; 3) Р1=32730 Вт; Р2=30272 Вт; 4) Р1=32730 Вт; Р2=29046 Вт.
22. Двигатель с последовательным возбуждением работает в номинальном режиме. Как изменится частота вращения двигателя при обрыве обмотки возбуждения:
1) увеличится; 2) уменьшится; 3) станет равной нулю; 4) для ответа недостаточно данных?
221

10.ЭЛЕКТРОНИКА
10.1.Полупроводниковые диоды
Вполупроводниковых диодах используются специфические явления, возникающие на границе двух полупроводников с разным типом проводимости: р и n (рис. 10.1).
ε
–+
–+
–+
–+
– |
+ |
n |
– |
+ |
|
Рис. 10.1. Распределение носителей зарядов на границе двух полупроводников с разным типом проводимости при отсутствии приложенного напряжения
В полупроводнике n-типа основными носителями зарядов являются электроны, а в полупроводнике р-типа – дырки.
Вследствие разности концентраций свободных дырок и электронов по обе стороны от границы полупроводников при разомкнутой цепи источника энергии из полупроводника n-типа часть электронов диффундирует в полупроводник р-типа, а из полупроводника р-типа часть дырок диффундирует в полупроводник n-типа. В результате этого на границе полупроводников образуется слой из неподвижных отрицательных и положительных объемных зарядов, между которыми возникает электрическое поле напряженностью ε. При некотором значении напряженности электрического поля в p-n переходе диффузия через границу полностью прекращается, т.е. возникает запирающий слой.
Если к диоду приложить напряжение в прямом направлении (прямое напряжение), то под действием электрического поля напряженностью ε1, возникающего между электродами за счет действия внешнего источника напряжения, произойдет уменьшение напряженности электрического поля ε в области p-n перехода, что приведет к откры-
222

ванию диода (рис. 10.2). При этом через диод будет протекать прямой ток, обусловленный основными носителями зарядов.
ε1 
 ε
ε
–+
–+
–+
–+
р |
|
|
– |
+ |
n |
|
|
|
– |
+ |
|
|
|
|
|
I
+ |
– |
R |
U |
|
Рис. 10.2. Протекание тока через полупроводники с разным типом проводимости при приложенном прямом напряжении
(R – токоограничивающее сопротивление)
Если к диоду приложить напряжение в обратном направлении (обратное напряжение), то под действием электрического поля внешнего источника напряжения напряженностью ε1, возникающего между электродами за счет действия внешнего источника напряжения, произойдет увеличение напряженности электрического поля ε в области p-n перехода, что приведет к увеличению запирающего слоя и к закрытию диода (рис. 10.3).
|
|
|
|
|
|
|
|
|
|
|
|
ε1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ε |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
|
– |
+ |
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
|
– |
+ |
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
|
– |
+ |
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
р |
|
|
|
|
|
– |
|
– |
+ |
+ |
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
– |
|
– |
+ |
+ |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
– |
|
– |
+ |
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
+ |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 10.3. Распределение носителей зарядов на границе двух полупроводников с разным типом проводимости
при приложенном обратном напряжении
223

При этом через диод будет протекать незначительный обратный ток, обусловленный неосновными носителями зарядов.
Таким образом, в полупроводниковых диодах используется свойство p-n перехода проводить ток практически в одном направлении.
Iпр |
|
|
На |
электрической схеме |
графическое |
|||
|
|
изображение диода |
указывает |
направление |
||||
А |
|
К |
||||||
|
протекания прямого тока (рис. 10.4), |
кото- |
||||||
|
||||||||
|
|
|
рый направлен от положительного электрода |
|||||
|
|
|
||||||
Рис. 10.4. Графическое |
(типа р) |
к отрицательному электроду (типа |
||||||
n). Положительный электрод |
называется |
|||||||
изображение диода |
||||||||
|
|
|
анодом (А), отрицательный – катодом (К). |
|||||
Работа |
|
полупроводникового диода |
характеризуется |
вольт- |
||||
амперной характеристикой (рис. 10.5).
I
Iпр.max
Iобр |
U |
|
|
Uобр max |
Uпр |
Рис. 10.5. Вольт-амперная характеристика диода
Нагрузочную способность диода определяют предельно допустимый прямой ток Iпр.max и предельно допустимое обратное напряже-
ние Uобр.max. Обратный ток диода Iобр очень мал (единицы или десятки мкА) и практически не учитывается. Если же Uобр превысит предель-
но допустимое значение, произойдет резкое (лавинное) увеличение обратного тока, что приведет к необратимому пробою диода и выходу его из строя. Поэтому при работе диодов в выпрямительных схемах
224

Uобр не должно превышать предельно допустимого значения. Чтобы прямой ток не превышал допустимого значения, последовательно с диодом должно быть включено токоограничивающее сопротивление (или какая-то нагрузка). Падение напряжения на открытом диоде Uпр невелико и составляет обычно (0,5–1,5) В.
В зависимости от предельно допустимой частоты тока и напряжения различают низкочастотные, среднечастотные и высокочастотные диоды.
10.2. Выпрямители переменного тока
10.2.1. Основные понятия
Выпрямителем называют устройство с электрическими вентилями (диодами), предназначенное для преобразования энергии переменного тока в энергию постоянного тока.
На базе выпрямителей построены схемы преобразователей напряжения для питания радиоэлектронной аппаратуры. Мощные выпрямители применяются в электроприводе для питания двигателей постоянного тока.
Классическая схема преобразователя переменного напряжения в постоянное (рис. 10.6) состоит из трансформатора Тр, вентилей В, сглаживающего фильтра СФ.
Сеть |
|
|
|
|
|
К приемнику |
Тр |
|
В |
|
СФ |
||
|
|
|
электроэнергии |
|||
|
|
|
|
|
|
|
Рис. 10.6. Блок-схема преобразователя переменного напряжения в постоянное
Трансформатор (обычно понижающий) изменяет величину переменного напряжения до необходимой величины. Вентили (диоды) образуют выпрямительную схему, преобразующую переменное напряжение в пульсирующее (постоянной полярности, но переменной величины). Сглаживающий фильтр уменьшает пульсацию выпрямленного напряжения. Иногда трансформатор или сглаживающий фильтр в преобразователе напряжения может отсутствовать.
Пульсирующее напряжение на выходе выпрямителя имеет сложную форму. Его можно представить в виде суммы постоянной и пе-
225

ременной составляющих. Переменная составляющая содержит гармоники основной частоты и кратных ей частот (высшие гармоники).
Важными параметрами выпрямителя являются: постоянная составляющего выпрямленного напряжения U0, постоянная составляющего выпрямленного тока I0, коэффициент пульсаций, равный отношению амплитуды переменной составляющей основной частоты выпрямленного напряжения к его постоянной составляющей
Кп = |
Uосн.max |
. |
(10.1) |
|
|||
|
U0 |
|
|
Варианты выпрямительных схем отличаются числом фаз переменного напряжения, схемой соединения вентилей, формой выпрямленного напряжения и другими особенностями.
10.2.2. Однополупериодный выпрямитель
Однополупериодный выпрямитель состоит из одного диода, включенного последовательно с нагрузкой (рис. 10.7).
|
|
|
|
u2 |
|
|
|
V |
|
|
|
|
|
|
|
|
|
0 |
π |
ωt |
|
|
|
|
2π |
||
u1 |
u2 |
Rн |
uн |
uн |
|
|
(i) |
|
|
||||
|
|
i |
|
|
U0 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
ωt |
Рис. 10.7. Электрическая схема и форма напряжений однополупериодного выпрямителя
Ток через диод и сопротивление нагрузки протекает только в течение одной половины периода, когда к диоду приложено напряжение в прямом направлении (см. рис. 10.7). При обратном напряжении на диоде в течение второй половины периода (от π до 2π) диод закрыт. Таким образом, с выхода выпрямителя снимаются импульсы, создающие напряжение uн и ток i, пульсирующие с частотой питающего напряжения u1. Выпрямленное пульсирующее напряжение можно представить как сумму переменной и постоянной составляющих этого на-
226

пряжения. Постоянная составляющая выпрямленного напряжения U0 равна среднему за период значению выпрямленного напряжения
U 0 = |
2U 2 |
≈ 0,45 U 2 . |
(10.2) |
|
π |
|
|
Среднее значение тока диода равно среднему току нагрузки, т.е. его постоянной составляющей
I0 |
= Iв = Iн = 0,45 |
U 2 |
. |
(10.3) |
|
||||
|
|
Rн |
|
|
Недостатком данного выпрямителя является большое значение коэффициента пульсаций Кп≈1,57. Кроме этого, мощность трансформатора у такого выпрямителя используется неполностью.
Однополупериодные выпрямители применяются редко и лишь при небольшой мощности нагрузки.
10.2.3. Двухполупериодный выпрямитель
Лучшими свойствами обладает двухполупериодный выпрямитель, который бывает двух типов: с выводом от средней точки вторичной обмотки трансформатора и мостовой.
Мостовой выпрямитель (рис. 10.8) имеет четыре диода. В мостовой выпрямительной схеме диоды работают попарно через полпериода. Соответствующая пара диодов открыта, когда к каждому из них приложено напряжение в прямом направлении (см. рис. 10.8). В это время другая пара диодов закрыта.
Под действием обеих полуволн входного напряжения через сопротивление нагрузки ток всегда протекает в одном направлении не-
зависимо от полярности этого напряжения (см. рис. 10.8). |
|
i=i1+i2. |
(10.4) |
Среднее значение напряжения на нагрузке в этой схеме в два раза |
|
больше, чем в схеме однополупериодного выпрямителя, |
|
U0≈0,9U2, |
(10.5) |
а коэффициент пульсаций |
|
Кп≈0,67. |
(10.6) |
Мостовые выпрямители являются наиболее распространенными. Мощные выпрямители обычно выполняются по многофазным схемам, преимуществом которых являются равномерная загрузка фаз питающей сети и малые значения коэффициента пульсаций.
227

 u
u



 ωt
ωt
Выпрямитель состоит из шести диодов. В любой момент времени ток проводят два диода, на анодах которых в данный момент времени будет максимальный положительный потенциал, а на катодах – максимальный отрицательный потенциал (см. рис. 10.9). Из приведенной временной диаграммы видно, что каждый диод проводит ток в течение одной трети периода.
Постоянная составляющая выпрямленного напряжения для такой схемы
U0≈1,35U2. |
(10.7) |
Из всех рассмотренных выпрямителей трехфазный мостовой вы- |
|
прямитель имеет наименьший коэффициент пульсаций |
|
Кп≈0,057, |
(10.8) |
что позволяет применять такой выпрямитель без сглаживающего фильтра.
10.2.4. Сглаживающие фильтры
Однофазные выпрямители обычно снабжаются сглаживающими фильтрами, снижающими коэффициент пульсаций до допустимого значения. Эффективность фильтра оценивается коэффициентом сглаживания
q = |
Кп |
, |
(10.9) |
|
|||
|
Кпф |
|
|
где Кп – коэффициент пульсаций выпрямителя без фильтра; Кпф – коэффициент пульсаций выпрямителя с фильтром.
Простейший емкостный фильтр состоит из конденсатора, включенного на выходе выпрямителя параллельно нагрузке (рис. 10.10).
Действие конденсатора как элемента фильтра заключается в том, что в интервалы времени от 0 до π2 , от π до 3 π2 , когда пульсирующее
напряжение на выходе выпрямителя нарастает, конденсатор заряжается (см. рис. 10.10). При спаде выпрямленного напряжения (интерва-
лы от π2 до π, от 3 π2 до 2π) конденсатор, отдавая накопленную энер-
гию, разряжается через нагрузку. Ток разряда конденсатора по направлению совпадает с током нагрузки в интервалы времени от 0 до
π2 , от π до 3 π2 и тем самым компенсирует уменьшение тока нагрузки,
229
вызванное спадом выпрямленного напряжения. Чем больше емкость конденсатора, тем больше время разряда и тем меньше пульсации.
|
|
|
|
|
|
Др |
|
В |
С |
Rн |
В |
|
Rн |
|
|
ф |
|
|
||
|
|
а |
|
|
|
б |
|
|
|
Др |
uн |
|
|
|
|
|
|
|
|
|
В |
Сф1 |
|
|
U0 |
|
|
|
Сф2 |
Rн |
|
ωt |
||
|
|
|
|
|
|
|
|
|
|
|
0 π |
3 |
π 2π |
|
|
|
|
2 |
2 |
|
|
|
в |
|
|
|
г |
Рис. 10.10. Электрические схемы сглаживающих фильтров: емкостного (а); дроссельного (б); П-образного LC-фильтра (в)
и форма напряжения на нагрузке двухполупериодного выпрямителя с емкостным сглаживающим фильтром (г)
Чем больше частота питающего напряжения на входе выпрямителя, тем лучше протекает процесс сглаживания, так как емкостное сопротивление по переменным составляющим выпрямленного тока становится меньше. Эти составляющие тока протекают через конденсатор.
Сглаживающее действие дросселя (см. рис. 10.10) основано на том, что его индуктивное сопротивление для основной гармоники переменной составляющей выпрямленного тока во много раз больше сопротивления нагрузки. Поэтому основная часть переменной составляющей выпрямленного тока уменьшается дросселем. По постоянной составляющей сопротивление дросселя незначительно. Следовательно, напряжение нагрузки Uн будет определяться в основном постоянной составляющей. Дроссельный фильтр более эффективен при больших токах нагрузки.
Лучшими сглаживающими свойствами обладают комбинированные сглаживающие фильтры (Г-образные и П-образные), в которых
230
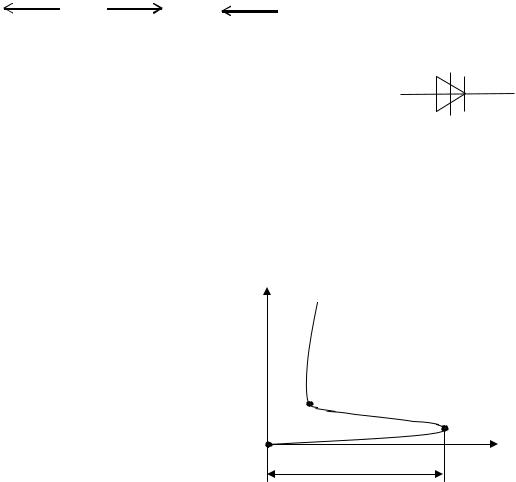
 в
в
окажется приложено к переходу П2 и ток в цепи практически равен нулю. При повышении напряжения на тиристоре ток в цепи увеличивается незначительно.
При достижении напряжением определенного значения, называемого напряжением пробоя Uпп, в переходе П2 напряженность электрического поля становится достаточной для ионизации и образования новых свободных носителей зарядов, при этом сопротивление перехода П2 резко уменьшается и тиристор открывается (рис. 10.12).
Ввиду незначительного внутреннего сопротивления открытого тиристора падение напряжения на нем (участок бв вольт-амперной характеристики) составляет всего 1–2 В. Ток, протекающий через тиристор, ограничивается только сопротивлением нагрузки.
Вотличие от диодного триодный тиристор имеет три электрода:
А– анод, К – катод и У – управляющий электрод (рис. 10.13).
|
|
|
|
|
|
|
ε1 |
|
|
|
ε2 |
|
|
|
|
|
|
|
ε3 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
|
+ |
|
|
|
+ |
|
– |
|
|
|
|
|
– |
|
+ |
|
|
|
|
|
|
|
А |
|
|
|
|
– |
|
+ |
|
|
|
+ |
|
– |
|
|
|
|
|
– |
|
+ |
|
|
|
К |
||
+ |
|
|
|
|
– |
|
+ |
|
|
|
+ |
|
– |
|
|
|
|
|
– |
|
+ |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
– |
|
+ |
|
|
|
+ |
|
– |
|
|
|
|
|
– |
|
+ |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
р1 |
|
– |
+ |
|
n1 |
|
+ |
– |
|
|
р2 |
|
– |
+ |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
n2 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
– |
|
+ |
|
|
|
+ |
|
– |
|
|
|
|
|
– |
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
П1 |
|
|
|
П2 |
|
|
|
|
|
|
П3 |
|
|
|
|
|
|||||||||||
|
|
|
|
Iупр |
У |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uупр |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|||||
Rн
– 
Рис. 10.13. Структура триодного тиристора
Управляющим является один из электродов, примыкающих к закрытому p-n переходу.
А |
К |
А |
|
К |
|
|
|
||
У |
а |
|
|
У |
|
|
б |
||
|
|
|
|
Рис. 10.14. Условное графическое изображение триодного тиристора: а – с управлением по аноду; б – с управлением по катоду
232

В зависимости от этого триодные тиристоры имеют различное условное графическое изображение на схеме (рис. 10.14).
Между анодом и катодом тиристора подается напряжение U питания нагрузки Rн (см. рис. 10.13), величина которого меньше напряжения прямого пробоя Uпп (напряжения включения). При этом тиристор закрыт (рис. 10.15). При подаче на управляющий электрод положительного потенциала Uупр от источника управления в p-n переходе П3 возникает ток управления Iупр и появляются дополнительные носители зарядов, которые проникают в область закрытого p-n перехода
П2 и вызывают ионизацию, что |
I |
|
|
|
|
|||
приводит к открыванию перехо- |
|
|
|
|
||||
да П2, в результате чего через |
|
|
|
|
|
|
|
|
тиристор протекает ток (см. рис. |
|
|
|
|
|
|
|
|
10.15). Чем больше ток управле- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ния Iу, тем больше дополнитель- |
|
|
Iус |
|
|
|
Iу2 Iу1 |
Iу=0 |
ных носителей зарядов появля- |
|
|
|
|
|
|
||
|
|
|
|
|
|
|||
|
|
|
|
|
||||
ется |
в |
области перехода П2, |
U |
|
что |
способствует открыванию |
|||
U”пп |
||||
тиристора при меньшем напря- |
||||
жении Uпп между анодом и ка- |
U’пп |
|||
тодом. |
|
Uпп |
||
|
При |
определенном значе- |
||
|
|
|||
нии тока управления Iус, называемом током сглаживания, тиристор будет работать как неуправляемый диод (см. рис. 10.15).
Таким образом, тиристор может открываться двумя способами:
–подачей между анодом и катодом напряжения пробоя Uпп;
–при напряжении, меньшем Uпп, током Iу управления достаточной величины.
Так как управляющий электрод после открытия тиристора перестает оказывать влияние на его работу, то в цепь управляющего электрода обычно подается короткий импульс длительностью около 10 мкс. Ток управления составляет 1–2% от тока основной цепи.
Тиристор закрывается, когда напряжение между анодом и катодом становится равным нулю или изменяется его полярность на противоположную.
233

Таким образом, тиристор имеет два устойчивых состояния: закрытое, при котором его сопротивление очень велико, и открытое, при котором его сопротивление практически равно нулю.
Благодаря этому свойству тиристоры применяются для бесконтактной коммутации цепей и в схемах управляемых выпрямителей.
10.4. Управляемые выпрямители
Управляемый выпрямитель – это выпрямитель, на выходе которого величина напряжения может изменяться по заданному закону. В таких выпрямителях вместо диодов применяются триодные тиристоры, позволяющие изменять момент их перехода в открытое состояние. Переход тиристора из закрытого состояния в открытое происходит под действием управляющего импульса.
Простейшим тиристорным выпрямителем является однополупериодный (рис. 10.16). В основную цепь тиристора между анодом и катодом подается переменное напряжение, амплитуда которого меньше напряжения включения тиристора. Поэтому при отсутствии управляющего импульса тиристор закрыт.
|
|
|
u2, i |
u2 |
|
|
|
|
i |
|
|
Im1 |
Im2 |
i |
|
~u2 |
ωt |
||
Iупр |
Rн |
uн |
Iупр |
|
|
|
|||
|
i |
|
|
ωt |
|
|
|
α1 |
|
|
|
|
|
|
|
|
|
α2 |
|
Рис. 10.16. Электрическая схема и временные диаграммы однополупериодного тиристорного выпрямителя
При наличии прямого напряжения между анодом и катодом и при подаче импульса в цепь управления тиристор открывается и будет от-
234

крыт до тех пор, пока напряжение u2 не станет равным нулю (см. рис. 10.16). Угол α (α1, α2) называется углом отпирания тиристора. При изменении угла отпирания изменяется амплитудное значение тока Im, протекающего через тиристор и сопротивление нагрузки, а следовательно, изменяются среднее значение выпрямленного тока, т.е. постоянная составляющая тока нагрузки, и напряжение на нагрузке.
Нетрудно заметить, что средняя величина выпрямленного напряжения будет тем больше, чем меньше угол α отпирания тиристора. Если пренебречь падением напряжения на тиристоре, то зависимость среднего напряжения на нагрузке от угла отпирания определяется по выражению
U0 = |
2U2 |
(1+cosα ). |
(10.10) |
|
2π |
|
|
Таким образом, изменяя угол α от π до нуля, можно регулировать напряжение на нагрузке от нуля до максимальной величины, составляющей 0,45U2, где U2 – действующее значение переменного напряжения.
10.5. Регулятор переменного тока
Регулятор содержит два триодных тиристора Д1 и Д2, включенных встречно-параллельно (рис. 10.17).
|
|
|
u2, i |
u2 |
|
|
|
|
i |
|
|
Im1 |
Im2 |
i |
|
~u2 |
ωt |
||
Iупр1 |
Д1 |
|
Iупр1 |
|
Д2 Rн |
uн |
ωt |
||
Iупр2 |
|
|
α1 |
|
|
|
|
α2 |
|
|
i |
|
Iупр2 |
ωt |
|
|
|
||
|
|
|
π+α1 |
|
|
|
|
|
|
|
|
|
|
π+α2 |
Рис. 10.17. Регулятор переменного тока на двух тиристорах и его временная диаграмма
235

В момент времени, соответствующий фазовому сдвигу α1=ωt, управляющий импульс Iупр1 поступает на тиристор Д1, анод которого имеет положительный потенциал относительно катода. Тиристор Д1
открывается, в результате чего в течение времени π −ωα1 через сопро-
тивление нагрузки Rн протекает ток. В следующую половину периода управляющий импульс Iупр2 поступает на тиристор Д2, который пропускает ток через сопротивление нагрузки Rн с момента времени π+α1
до момента 2π (т.е. в течение времени 2ωπ −π +ωα1 = π −ωα1 , как и тири-
стор Д1). Таким образом, ток и, следовательно, напряжение на сопротивлении нагрузки Rн являются переменными и имеют форму усеченных полуволн синусоиды. Действующее значение этого напряжения зависит от угла отпирания
U н =U 2 |
1 − |
α |
+ sin2α . |
(10.11) |
|
|
π |
2π |
|
Обычно в регуляторах переменного тока используют специальные симметричные тиристоры, называемые симисторами.
|
|
|
u2, i |
u2 |
|
|
|
|
|
i |
|
|
~u2 |
|
Im1 Im2 |
i |
|
|
|
ωt |
|||
|
Д |
|
Iупр |
|
|
Iупр |
Rн |
uн |
|
||
α1 |
ωt |
||||
|
|
|
|||
|
|
|
α2 |
||
|
|
|
π+α1 |
||
|
|
|
|
||
|
i |
|
|
π+α2 |
Рис. 10.18. Регулятор переменного тока на симисторе и его временная диаграмма
Симистор представляет собой два встречно-параллельно включенных тиристора с общим выводом управляющих электродов, выполненных в одном монокристалле кремния. Регулятор на симисторе (рис. 10.18) обладает такими же свойствами, что и регулятор на двух тиристорах.
Для управления симистором используются импульсы различной полярности.
236

10.6. Биполярные транзисторы
Работа биполярных транзисторов основана на явлениях взаимодействия двух близко расположенных p-n переходов. Различают плоскостные и точечные биполярные транзисторы.
Эмиттер |
База |
|
Коллектор |
р-тип |
|
||
n-тип |
εкб |
n-тип |
|
|
– |
– |
– |
– |
+ |
|
– |
– |
– |
|
|
Iэ |
Э |
– – – – |
+ |
|
– – – |
Iк |
||||||
|
– |
– |
– |
– |
+ |
|
– |
– |
– |
К |
||
|
|
– |
– |
– |
– |
+ |
|
– |
– |
– |
|
|
|
|
– |
– |
– |
– |
+ |
|
– |
– |
– |
|
|
|
|
– |
– |
– |
– |
+ |
|
– |
– |
– |
|
|
Еэ=Uэб |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
Uкб=Ек |
|
|
|
|
|
|
|
|
|
Iб |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К К
Б Б
Э Э
n-p-n |
p-n-p |
Рис. 10.19. Структура транзистора n-p-n и условное графическое изображение транзисторов
типа n-p-n и p-n-р на схеме
Плоскостной биполярный транзистор представляет собой трехслойную структуру типа p-n-p или типа n-p-n (рис. 10.19). Транзистор называется биполярным потому, что физические процессы в нем связаны с движением носителей заряда обоих знаков (свободных дырок и электронов). Средний слой транзистора называется базой Б, один крайний слой – коллектором К, а другой крайний слой – эмиттером Э. Каждый слой представляет собой электрод и имеет вывод. Посредст-
237




Iб |
Uкэ1 |
Uкэ2 |
Iк |
Iб4 |
|
|
|||
|
|
|
|
Iб3 |
|
|
|
|
Iб2 |
|
|
|
|
Iб1 |
|
|
Uбэ |
|
Uкэ |
|
|
а |
б |
|
|
Рис. 10.21. Входные (а) и выходные (б) статические |
|
||
характеристики биполярного транзистора
(Uкэ2>Uкэ1; Iб4>Iб3>Iб2>Iб1)
Биполярные транзисторы характеризуются h-параметрами. Эти параметры можно рассчитать по заданным статическим характеристикам. Каждый h-параметр имеет свой физический смысл.
Сопротивление со стороны входа транзистора
h = |
dUбэ |
при Uкэ=const. |
(10.13) |
|
|||
11 |
dIб |
|
|
|
|
|
Коэффициент передачи по напряжению
h = |
dU бэ |
при Iб=const. |
(10.14) |
|
|||
12 |
dU кэ |
|
|
|
|
|
Коэффициент усиления по току
h = |
dIк |
при Uкэ=const. |
(10.15) |
|
|||
21 |
dIб |
|
|
|
|
|
Проводимость со стороны выхода транзистора
h = |
dIк |
при Iб=const. |
(10.16) |
|
|||
22 |
dU кэ |
|
|
|
|
|
Численные значения h-параметров обычно составляют:
h11=103–104 Ом; h12=2·10-4–2·10-3; h21=20–200; h22=10-5–10-6 См.
Основное преимущество биполярных транзисторов состоит в высоком быстродействии при достаточно больших токах коллектора.
Недостатком биполярных транзисторов является относительно небольшое входное сопротивление при включении по схеме с ОЭ.
239
Взависимости от предельно допустимой мощности рассеяния на коллекторе различают транзисторы малой, средней и большой мощности.
Взависимости от предельно допустимой частоты тока и напряжения различают низкочастотные, среднечастотные и высокочастотные транзисторы.
10.7. Нагрузочный режим работы биполярного транзистора
При работе транзисторов в усилителях используется нагрузочный (динамический) режим работы транзистора. Усилителями называются устройства, в которых с помощью малых изменений величины на их входе происходит управление значительно большими изменениями
|
|
|
|
|
|
|
|
|
|
той же либо другой величины |
||||
|
|
|
|
|
|
|
|
IкRк |
+Ек на их выходе. В усилителях |
|||||
|
R2 |
|
Rк |
|
|
|
управляющей |
величиной |
||||||
|
|
|
|
|||||||||||
|
|
|
|
|
|
Ср2 |
|
(входным сигналом) являются |
||||||
|
|
T |
|
|
||||||||||
|
iвх Ср1 |
|
|
|
|
|
напряжение, ток или мощ- |
|||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
ность, |
которые |
необходимо |
||
|
|
|
|
|
|
|
|
Uкэ |
uвых |
усилить, |
а управляемой ве- |
|||
uвх |
|
|
|
|
|
|
|
личиной |
(выходным |
сигна- |
||||
R1 |
|
|
|
|
|
|
|
лом) |
являются |
напряжение, |
||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
ток или мощность, получае- |
||||
|
|
|
|
|
|
|
|
|
|
мые от независимого источ- |
||||
|
|
|
|
|
|
|
|
|
|
ника питания Ек (рис. 10.22). |
||||
|
Рис. 10.22. Усилительный каскад |
Чтобы на выходе усили- |
||||||||||||
|
тельного |
каскада получить |
||||||||||||
|
|
|
|
на транзисторе |
|
|||||||||
|
|
|
|
|
выходной |
сигнал |
uвых, |
изме- |
||||||
|
|
|
|
|
|
|
|
|
|
|||||
няющийся в зависимости от входного сигнала uвх, в коллекторную цепь транзистора T включается нагрузочное сопротивление Rк.
Уравнение нагрузочного режима для цепи коллектора имеет вид
Uкэ=Ек–IкRк. |
(10.17) |
При изменении входного сигнала uвх изменяется ток базы, что приводит к изменению тока цепи коллектора Iк, следовательно, изменяется напряжение на нагрузочном сопротивлении IкRк, что приводит к изменению напряжения Uкэ, переменная составляющая которого поступает на выход усилительного каскада.
В соответствии с уравнением (10.17) строится нагрузочная вольтамперная характеристика транзистора.
240

Обычно эта характеристика |
строится на семействе статических |
||||||
выходных характеристик транзистора (рис. 10.23). |
|
||||||
Нагрузочная |
характе- |
|
Iк |
|
|||
ристика является |
прямой, |
|
Iб4 |
||||
|
Ек 2 |
||||||
не проходящей через |
на- |
Iк = |
|
||||
чало |
координат. |
Для |
ее |
|
Rк |
Iб3 |
|
построения по уравнению |
|
|
|||||
|
|
|
|||||
нагрузочной |
характери- |
|
|
Iб2 |
|||
стики (Uкэ=Ек–IкRк) опре- |
|
|
|||||
|
|
|
|||||
деляются |
координаты |
|
|
|
|||
двух |
точек, |
характери- |
|
|
Iб1 |
||
зующих два |
крайних ре- |
|
|
||||
|
|
|
|||||
жима работы транзистора |
1 |
Uкэ |
||
(см. рис. 10.23): |
||||
|
||||
1) Iк=0, Uкэ=Ек; |
Ек |
|
||
2) Uкэ=0, Iк = Ек . |
Рис. 10.23. Нагрузочная вольт-амперная |
|||
|
Rк |
характеристика транзистора на |
|
|
Точки |
пересечения |
семействе статических |
|
|
выходных характеристик |
|
|||
нагрузочной |
характери- |
|
||
|
|
|||
стики со статическими являются рабочими точками в усилительном каскаде при соответствующих токах базы.
Графоаналитический метод с использованием нагрузочной характеристики, построенной на семействе статических характеристик, широко применяется при анализе работы усилительных схем.
Ключевой режим работы транзистора от усилительного отличается тем, что транзистор может находиться только в двух состояниях: в состоянии отсечки, которому соответствует точка 1 на нагрузочной характеристике, и в состоянии насыщения, которому соответствует точка 2 (см. рис. 10.23). Особенность этого режима состоит в том, что на коллекторе транзистора рассеивается очень маленькая мощность, и поэтому, в отличие от усилительного режима, отпадает необходимость использования радиатора даже для мощных транзисторов. Мощность, рассеиваемая на коллекторе транзистора, можно опреде-
лить по формуле |
|
Рк = Iк2 Rк , |
(10.18) |
где Iк – ток коллектора; Rк – сопротивление коллекторного перехода. В режиме отсечки ток Iк очень мал, поэтому и мощность Рк также мала. В режиме насыщения ток Iк достигает максимального значения, но сопротивление Rк мало, поэтому и мощность Рк тоже мала. Пере-
241

ход транзистора из состояния отсечки в состояние насыщения и обратно происходит практически мгновенно под действием управляющего напряжения, подаваемого на базу. За это время транзистор не успевает нагреться.
10.8. Полевые транзисторы
Полевыми транзисторами называются полупроводниковые приборы, в которых регулирование тока осуществляется изменением проводимости проводящего канала с помощью электрического поля, перпендикулярного направлению тока. Протекание тока в канале обусловлено только одним типом зарядов. Электроды, подключенные к каналу, называются стоком и истоком, а управляющий электрод – затвором. Управляющее напряжение, создающее электрическое поле в канале, приложено между затвором и истоком.
Различают полевые транзисторы двух типов: с затвором в виде р- n перехода и с изолированным затвором.
Устройство транзистора с затвором в виде p-n перехода представлено на рис. 10.24. Основу полевого транзистора составляет полупроводниковая пластина р-типа, к торцам которой приложено напряжение UС, создающее ток IС, протекающий через сопротивление нагрузки Rн.
Uз |
|
З |
|
n-типа |
p-n переход |
|
|
|
|||
– |
+ |
|
|
С |
|
|
И |
Канал р-типа |
Iс |
||
|
|
|
|||
|
|
|
|
|
|
|
Uс |
З |
n-типа |
Rн Uвых |
|
|
|
|
|
|
|
|
+ – |
|
|
|
|
Рис. 10.24. Схематическое изображение полевого транзистора с p-n переходами
В полупроводниковой пластине этот ток создается движением основных носителей заряда. Торец пластины, от которого движутся носители заряда, называется истоком. Торец, к которому движутся носители заряда, называется стоком. В две противоположные боко-
242

вые поверхности основной пластины вплавлены пластинки n-типа. На границе раздела возникают p-n переходы, к которым в непроводящем направлении между истоком и затвором приложено входное напря-
жение UЗ.
Величина этого напряжения может изменяться при обязательном сохранении указанной на схеме полярности. С увеличением напряжения на затворе области p-n пе-
реходов увеличиваются, а попе- IС речное сечение канала и его проводимость уменьшаются.
Таким образом, изменением напряжения UЗ на затворе можно изменять ток через сопротивление нагрузки Rн и выходное на-
пряжение Uвых.
Работу полевого транзистора принято характеризовать зави-
симостью IC=f(UC) при различных значениях напряжения на затворе UЗ (рис. 10.25).
Включение полевого транзистора по схеме с общим истоком приведено на рис. 10.26.
Полевой транзистор может включаться также по схеме с общим
стоком и с общим затвором. |
Однако такие схемы включения приме- |
|||||||
няются редко. |
|
|
|
|
|
|
|
|
|
|
С |
IС |
|
|
|
С |
IС |
– |
З |
|
+ |
+ |
З |
– |
||
И |
|
И |
||||||
UЗ |
|
|
UС |
UЗ |
|
UС |
||
|
|
|
|
|
||||
+ |
а |
|
|
– |
– |
|
б |
+ |
|
|
|
|
|
|
|
||
Рис. 10.26. Схемы включения с общим истоком и условные обозначения полевых транзисторов с управляющим p-n переходом:
а – с каналом n-типа; б – с каналом р-типа
Перед биполярными полевые транзисторы имеют существенные преимущества, к которым относятся большое входное сопротивление, малый уровень собственных шумов, незначительное влияние темпе-
243

ратуры на усилительные свойства. Ток затвора полевого транзистора очень мал и составляет Iз=10–8–10–12 А.
Полевые транзисторы выпускаются также с изолированным затвором. В отличие от транзистора с затвором в виде p-n перехода в транзисторах с изолированным затвором между каналом и затвором внесен изолирующий слой. У транзисторов с изолированным затвором, которые называют транзисторами МДП-типа (металл-
диэлектрик-полупроводник), ток затвора уменьшен до величины
IЗ=10–13–10–16 А.
10.9. Классификация усилителей
Усилителями называются устройства, предназначенные для увеличения значений параметров электрических сигналов за счет энергии включенного источника питания. Различные усилители применяются
Кu |
|
|
|
для |
преимущественного |
усиления |
||||||||
|
|
|
значений тех или иных параметров |
|||||||||||
|
|
|
|
|||||||||||
|
|
|
f |
сигналов. По этому признаку они де- |
||||||||||
|
|
|
лятся на усилители напряжения, тока |
|||||||||||
|
|
|
fв |
|||||||||||
Кu |
|
а |
и мощности. |
|
|
|
|
|||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
Возможны линейный и нелиней- |
||||||||||
|
|
|
|
|||||||||||
|
|
|
f |
ный режимы работы усилителя. В |
||||||||||
fн |
fв б |
|
усилителях с практически линейным |
|||||||||||
|
режимом работы получается мини- |
|||||||||||||
Кu |
|
|
|
мальное искажение формы усиливае- |
||||||||||
|
|
|
f |
мого сигнала. Искажение сигнала бу- |
||||||||||
|
|
|
дет минимальным, если без искаже- |
|||||||||||
|
|
в |
fв |
ния будут усиливаться все его гармо- |
||||||||||
Кu |
|
|
нические |
|
составляющие. |
Свойство |
||||||||
|
|
|
|
|||||||||||
|
|
|
усилителя |
увеличивать |
амплитуду |
|||||||||
|
|
|
|
|||||||||||
|
|
|
f |
гармонических составляющих сигна- |
||||||||||
fн |
|
|
fв |
ла |
характеризует |
его |
амплитудно- |
|||||||
|
г |
частотная характеристика (АЧХ), |
||||||||||||
Кu |
|
|
||||||||||||
|
|
|
представляющая |
собой |
зависимость |
|||||||||
|
|
|
f |
коэффициента усиления усилителя от |
||||||||||
|
|
|
частоты сигнала [ Кu = |
U&вых |
= Кu ( f ); |
|||||||||
|
|
f0 |
|
|||||||||||
|
|
|
U&вх |
|||||||||||
|
|
д |
|
|
|
I&вых |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
Рис. 10.27. АЧХ усилителей |
Кi |
= |
= Кi ( f )]. По типу АЧХ раз- |
|||||||||||
& |
|
|||||||||||||
|
|
|
|
|
|
Iвх |
|
|
|
|
|
|
||
|
|
|
|
244 |
|
|
|
|
|
|
|
|
||
личают усилители медленно изменяющихся напряжений и токов или усилители постоянного тока (рис. 10.27,а), усилители низких частот (рис. 10.27,б), усилители высоких частот (рис. 10.27, в), широкополосные усилители (рис. 10.27, г) и узкополосные усилители (рис. 10.27,д).
Типовые значения нижней и верхней границ частот АЧХ усилителей различного типа приведены в табл. 10.1.
Таблица 10.1
Типовые значения нижней и верхней границ частот АЧХ усилителей различного типа
Тип усилителя |
Граница нижних |
Граница верхних |
|
частот fн, Гц |
частот fв, Гц |
Усилитель постоянного тока |
0 |
103–108 |
Усилитель низких частот |
20–50 |
104–2·104 |
Усилитель высоких частот |
104–105 |
107–108 |
Широкополосный усилитель |
20–50 |
107–108 |
Вусилителях с нелинейным режимом работы при увеличении амплитуды напряжения на входе больше некоторого граничного уровня изменение напряжения на выходе усилителя практически отсутствует.
Такие усилители применяются главным образом в устройствах импульсной техники, в том числе логических.
Внастоящее время усилительная техника основана на широком внедрении усилителей в интегральном исполнении. Поэтому актуальным становится не разработка самих усилителей, а их применение для реализации различных функциональных узлов систем автоматики, управления и измерения.
10.10. Усилительные каскады на биполярных транзисторах
На рис. 10.28 приведена типовая схема усилительного каскада на биполярном транзисторе, включенном по схеме с ОЭ.
В этой схеме общий провод входной и выходной цепей заземлен. Источник входного сигнала (показан на схеме штриховой линией) имеет ЭДС ec=uc и внутреннее сопротивление Rвт. С1 и С2 – разделительные конденсаторы, отделяющие постоянный ток (цепь питания) от переменного тока (цепи источника усиливаемого сигнала
245




Входное сопротивление усилительного каскада с ОК R |
= |
U&бк |
|
||
вх |
& |
|
|
|
Iб |
составляет 100–300 кОм, что значительно больше входного сопротивления усилительного каскада с ОЭ.
|
+Ек |
|
|
|
|
|
|
R1 |
|
|
|
Rвт |
Iб |
С1 |
T |
|
|
|
|
|
|||
|
|
|
С2 |
|
|
ec=uc |
|
|
|
|
|
uвх |
|
|
|
|
|
|
R2 |
Rэ |
uвых=uн |
Rн |
|
|
|
|
Рис. 10.30. Схема усилительного каскада на биполярном транзисторе с ОК
Коэффициент усиления по напряжению Кu = |
U&н |
составляет |
& |
||
|
Uc |
|
0,8–0,9, т.е. близок к единице. При этом сигнал на выходе усилительного каскада повторяет форму и фазу сигнала на входе.
Выходное сопротивление эмиттерного повторителя Rвых составляет (10–50) Ом, что значительно меньше выходного сопротивления усилительного каскада с ОЭ.
Усилительный каскад с ОБ имеет значение коэффициента усиления по напряжению, близкое к его значению для усилительного каскада с ОЭ. Однако ему присущи существенные недостатки: значение его коэффициента усиления по току меньше единицы и, вследствие этого, мал его коэффициент усиления по мощности. Кроме того, он имеет малое входное и большое выходное сопротивления. По этим причинам усилительный каскад с ОБ применяется редко.
10.11. Усилительные каскады на полевых транзисторах
По аналогии с усилительными каскадами на биполярных транзисторах с ОБ, ОЭ и ОК различают три типа усилительных каскадов на полевых транзисторах: с общим затвором (ОЗ), с общим истоком
248

(ОИ) и общим стоком (ОС). Чаще других используется усилительный каскад с ОИ.
На рис. 10.31 приведена типовая схема усилительного каскада на полевом транзисторе с ОИ. Назначения всех элементов схемы аналогичны их назначениям в усилительном каскаде на биполярном транзисторе с ОЭ.
+Ес
|
|
|
|
|
|
|
R2 |
|
Rс |
|
|
|
|
|
|
|
С2 |
iн |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
iз |
|
|
T |
|
|
|
Iсп+iк |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
Rвт |
С1 |
|
Iзп+iз |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rн |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ec=uc |
|
|
|
|
|
uвх |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uвых=uн |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
R1 |
|
Iип |
|
|
|
|
Rи |
Си |
|
|
iи |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 10.31. Схема усилительного каскада на полевом транзисторе с ОИ
При синусоидальном входном сигнале усилительного каскада с
ОИ:
▪входное сопротивление Rвх=102–103 кОм;
▪выходное сопротивление Rвых=Rс=10–100 кОм;
▪коэффициент усиления по напряжению в режиме холостого хо-
да Кu = U&и =10–100;
U&с
▪ коэффициент усиления по току Кi = I&и =50–500;
I&с
▪ коэффициент усиления по мощности К |
р |
= |
Ри |
= К |
u |
К |
= |
|
|||||||
|
|
Р |
i |
|
|||
|
|
|
с |
|
|
|
|
=(0,6–40)·103.
Главным достоинством усилительного каскада на полевом транзисторе с ОИ относительно усилительного каскада на биполярном транзисторе с ОЭ является большое входное сопротивление, основным недостатком – меньшее быстродействие. Последнее объясняется наличием больших емкостей между электродами полевого транзистора, влияние которых в приведенном выше анализе не учитывалось.
249
Усилительный каскад с ОС (рис. 10.32), называемый также истоковым повторителем, функционально подобен эмиттерному повторителю (см. рис. 10.30). Коэффициент усиления истокового повторителя по напряжению Кu=0,8–0,9 близок к единице, выходное сопротивление Rвых=1–10 МОм.
|
+Ес |
|
|
|
|
|
|
R2 |
|
|
|
Rвт |
|
С1 |
T |
|
|
|
|
|
|
||
|
|
|
С2 |
|
|
ec=uc |
|
|
|
|
|
uвх |
|
|
|
|
|
|
R1 |
Rи |
uвых=uн |
Rн |
|
|
|
|
Рис. 10.32. Схема усилительного каскада на полевом транзисторе с ОС
Усилительные каскады с ОЗ в устройствах промышленной электроники не применяются.
В качестве приемника энергии к выходу усилительного каскада может быть подключен тоже усилительный каскад. Их совокупность образует многокаскадный усилитель. В усилителях низких частот, высоких частот, а также в широкополосных и узкополосных усилителях электрическая связь между каскадами реализуется с помощью конденсаторов, в усилителях постоянного тока – с помощью резисторов или непосредственных связей. В последнем случае любые изменения постоянного напряжения на выходе одного каскада из-за нестабильности параметров транзистора при действии дестабилизирующих факторов, обычно температуры, влияют на режим работы других каскадов, что приводит к изменению напряжения на выходе многокаскадного усилителя даже при отсутствии усиливаемого сигнала. Это явление называется дрейфом нуля. Для того чтобы уменьшить дрейф нуля, применяют дифференциальные усилители постоянного тока.
250

10.12. Дифференциальный усилитель
Наиболее распространена схема дифференциального усилительного каскада, называемого также параллельно-балансным каскадом, на основе моста постоянного тока (рис. 10.33), плечи которого образованы резисторами Rк1=Rк2 и биполярными транзисторами VT1 и VT2 одного типа, включенными по схеме с ОЭ.
+Ек
|
|
|
|
|
|
|
Iк1п+iк1 |
|
|
|
Rк1 |
|
Rк2 |
|
|
I |
к2п |
+i |
к2 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Uвых п+uвых |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
VT1 |
|
|
|
|
|
|
|
|
|
VT2 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
Rвт1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
+ |
|
|
|
|
Rн |
|
– |
|
|
Rвт2 |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ec2=uc2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ec1=uc1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
uвх1 |
|
|
Iэ1п+iэ1 |
|
|
Iэ2п+iэ2 |
|
|
|
|
uвх2 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Rэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Еэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 10.33. Дифференциальный усилительный каскад на основе моста постоянного тока
Для лучшей балансировки моста выбирают транзисторы, помещенные в одном корпусе, параметры которых отличаются на 1–5%. Два источника сигналов включаются в цепи баз транзисторов, называемые несимметричными входами, а приемник с сопротивлением нагрузки Rн – между коллекторами транзисторов (симметричный вы-
ход с uвых).
Рассмотрим режим покоя каскада, т.е. при напряжении uвх1=uвх2=0 или коротком замыкании входов. В этом случае напряжение
Uбэп=Еэ–Rэ(Iэ1п+Iэ2п)>0 (10.20)
одинаково для обоих транзисторов, и поэтому их режимы работы будут различаться мало. В таком каскаде осуществляется стабилизация режима покоя. Если под действием дестабилизирующих факторов, например нагрева, возрастут токи коллекторов Iк1п, Iк2п и эмиттеров Iэ1п, Iэ2п, то напряжение Uбэ п уменьшится, эмиттерные переходы станут пропускать меньшие токи; в результате токи коллекторов Iк1п, Iк2п и напряжение покоя на выходе
251
Uвых п=Rк1Iк1п–Rк2Iк2п |
(10.21) |
будут стабилизированы. Стабилизация режима покоя будет тем значительнее, чем больше сопротивление цепи эмиттеров Rэ. Для этой цели в цепь эмиттеров иногда включают источник тока Iэ=Iэ1п+Iэ2п.
Из (10.21) видно, что любые одинаковые изменения в одноименных плечах каскада не вызывают изменения напряжения Uвых п, т.е. дрейфа нуля. В реальных каскадах нет полной симметрии элементов, однако дрейф напряжения Uвых п в дифференциальном усилителе по сравнению с усилительными каскадами на биполярных (см. рис. 10.29) и полевых (см. рис. 10.31) транзисторах снижается на несколько порядков.
Дифференциальный усилитель может работать в различных режимах.
Если имеется два независимых источника сигналов uс1 и uс2, то возможно их противофазное или синфазное включение, т.е. с противоположными и одинаковыми полярностями относительно общего узла цепи.
При противофазном включении, если uс1>0 при uс2<0 (см. рис. 10.33), токи базы и коллектора транзистора VT1 возрастают, а транзистора VT2 уменьшаются на такое же значение. При этом напряжение на коллекторе транзистора VT1 уменьшается, а на напряжение на коллекторе транзистора VT2 увеличивается.
Наоборот, если uс1<0 при uс2>0, токи базы и коллектора транзистора VT2 возрастают, а транзистора VT1 уменьшаются на такое же значение. При этом напряжение на коллекторе транзистора VT2 уменьшается, а на напряжение на коллекторе транзистора VT1 увеличивается.
Действие синфазных сигналов равного значения uс1=uс2 соответствует одинаковому изменению режимов работы транзисторов. При этом изменения напряжения на выходе усилителя с идеальной симметрией плеч по уравнению (10.21) не будет, так как синфазные сигналы представляют собой обычно различного рода помехи (атмосферные, сетевые и т.д.).
Если источник сигнала uс один, он может подключаться симметрично (рис. 10.34) и несимметрично (рис. 10.35, 10.36).
В последнем случае при подключении к неинвертирующему входу фазы выходного uн и входного uс напряжений совпадают (см. рис. 10.35), а при подключении к инвертирующему входу – противоположны (см. рис. 10.36).
252

|
|
uн |
|
Rвт |
+ |
Rн |
– |
|
|
||
ec=uc |
uвх |
|
|
|
Rэ |
|
|
|
|
Еэ |
|
Рис. 10.34. Симметричное подключение источника сигнала к дифференциальному усилителю
uн
Rвт |
+ |
Rн |
– |
|
|
ec=uc
uвх
Rэ
Еэ 
Рис. 10.35. Несимметричное подключение источника сигнала к неинвертирующему входу дифференциального усилителя
uн
+ |
Rн |
– |
Rвт |
ec=uc
uвх
Rэ
Еэ 
Рис. 10.36. Несимметричное подключение источника сигнала к инвертирующему входу дифференциального усилителя
253

Неинвертирующий и инвертирующий входы на схеме обозначаются знаками «+» и «–» соответственно.
Значения параметров дифференциальных усилителей на биполярных и полевых транзисторах того же порядка, что и каскадов с ОЭ и ОС соответственно. Основные достоинства дифференциальных усилителей – помехоустойчивость к синфазным сигналам и малый дрейф нуля. Поэтому дифференциальные усилители применяются в качестве входных каскадов усилителей постоянного тока.
10.13. Обратная связь в усилителях
Обратной связью принято называть связь, по которой осуществляется воздействие выходной величины устройства на вход этого же устройства. Отрицательная обратная связь обеспечивает воздействие инвертированного значения выходной величины, что приводит к уменьшению входного сигнала. Положительная обратная связь увеличивает значение входного сигнала. Обратная связь в усилителях может быть последовательной или параллельной, по напряжению или по току, по переменной или по постоянной составляющей.
Ограничимся анализом обратной связи по переменной составляющей.
В общем случае цепь обратной связи по переменной составляющей представляет собой пассивный четырехполюсник, который выводами 1–1' подключается к выходу усилителя У, а выводами 2–2' – ко входу усилителя У (рис. 10.37).
|
iвых |
|
|
iвых |
|
У |
uвых |
Rн |
У |
u |
Rн |
|
|
|
вых |
||
2' |
1' |
|
2' |
1' |
|
ОС |
1 |
|
ОС |
|
|
2 |
|
2 |
1 |
|
|
|
|
|
|||
|
а |
|
|
б |
|
Рис. 10.37. Обратная связь: а – по напряжению; б – по току |
|
||||
По способу подключения входных выводов 1–1' четырехполюсника обратной связи ОС различают обратную связь по напряжению (см. рис. 10.37, а) и по току (см. рис. 10.37, б); по способу подключе-
254
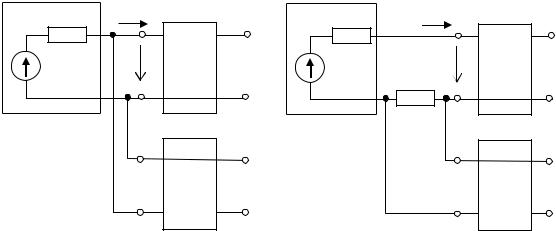
ния его выходных выводов 2–2' – параллельную (рис. 10.38, а) и последовательную (рис. 10.38, б). Обычно один вывод входной и один вывод выходной цепей четырехполюсника соединены накоротко (см.
рис. 10.37, 10.38).
iвх |
|
|
iвх |
|
Rвт |
|
|
Rвт |
|
uвх |
|
У |
uвх |
У |
ec |
|
|
ec |
|
2' |
1' |
1' |
2' |
1' |
2 |
|
ОС |
|
ОС |
1 |
1 |
2 |
1 |
|
а |
|
|
б |
|
Рис. 10.38. Обратная связь: а – параллельная; б – последовательная
Положительная обратная связь в усилителях практически не применяется, но лежит в основе работы различного рода автогенераторов.
В усилителях очень широко используется отрицательная обратная связь. Она позволяет создавать на основе усилителей устройства различного функционального назначения: сумматоры, интеграторы, фильтры и т.д.
10.14. Интегральные микросхемы и их классификация
Интегральные микросхемы (ИМС) в настоящее время являются одним из самых массовых изделий современной микроэлектроники. Применение ИМС облегчает расчет и проектирование функциональных узлов и блоков радиоэлектронной аппаратуры, ускоряет процесс создания принципиально новых аппаратов и внедрения их в серийное производство. Широкое использование ИМС позволяет повысить технические характеристики и надежность аппаратуры.
Отечественной электронной промышленностью освоен выпуск широкой номенклатуры ИМС, ежегодно создаются десятки и сотни
255
тысяч новых приборов для перспективных радиоэлектронных средств.
Интегральная микросхема (ИМС) – микроэлектронное изделие, выполняющее определенную функцию преобразования, обработки сигнала и (или) накапливания информации и имеющее высокую плотность упаковки электрически соединенных элементов и кристаллов.
Все интегральные микросхемы в зависимости от функционального назначения принято делить на аналоговые и цифровые. Аналоговые интегральные микросхемы предназначены для преобразования и обработки сигналов, изменяющихся по закону непрерывной функции. Цифровые интегральные микросхемы предназначены для преобразования и обработки сигналов, изменяющихся по закону дискретной функции.
Аналоговые и цифровые ИМС разрабатываются и выпускаются в виде серий. Каждая серия отличается степенью комплектности и содержит несколько ИМС. К серии относят совокупность типов ИМС, которые могут выполнять различные функции, но имеют единое кон- структивно-технологическое исполнение и предназначены для совместного применения. Как правило, с течением времени состав перспективных серий расширяется. Идентификатор серии в виде ее номера входит в обозначение ИМС и записывается в паспорте микросхемы.
Обозначение микросхемы состоит из четырех элементов. Первый элемент – цифра, соответствующая конструктивно-технологической группе, и второй элемент – две или три цифры, обозначающие порядковый номер разработки, являются полным номером серии ИМС. Первый и второй элементы совместно обозначают серию ИМС, перед которой могут быть поставлены буквы, характеризующие конструкцию корпуса. Перед обозначением серии ставится буква Н, если корпус керамический, буква Ф, если корпус пластмассовый. Буква, характеризующая корпус, перед обозначением серии не ставится, если ИМС выполнена в металлостеклянном или металлокерамическом корпусах. Для ИМС коммерческого применения условное обозначение начинается с буквы К, а в экспортном варианте – с букв ЭК. После условного номера разработки может быть поставлена буква, если в пределах одного типа выпускаются ИМС с различными электрическими параметрами. Третий элемент – две буквы, соответствующие подгруппе и виду, определяют функциональное назначение ИМС. Четвертый элемент – порядковый номер разработки микросхем в дан-
256

ной серии и для данного функционального назначения, может состоять из одной или нескольких цифр и одной буквы как необязательного элемента.
В табл. 10.2 представлены примеры классификации ИМС по функциональному назначению с указанием идентификатора подгруппы и вида (третий элемент обозначения).
Таблица 10.2
Примеры классификации ИМС по функциональному назначению
Подгруппа и вид микросхем |
|
Обозначение |
Пример |
1 |
|
2 |
3 |
1. Генераторы: |
|
|
|
прямоугольных импульсов |
|
ГГ |
КР531ГГ1, |
|
|
|
К564ГГ1 |
гармонических сигналов |
|
ГС |
|
сигналов специальной формы |
|
ГФ |
|
2. Детекторы: |
|
|
|
амплитудные |
|
ДА |
К157ДА1 |
частотные |
|
ДС |
|
фазовые |
|
ДФ |
|
3. Ключи и коммутаторы: |
|
|
|
напряжения |
|
КН |
К590КН6, |
|
|
|
К591КН3 |
тока |
|
КТ |
К590КТ1 |
прочие |
|
КП |
К555КП1 |
4. Логические элементы: |
|
|
|
И-НЕ |
|
ЛА |
КР1533ЛА3, |
|
|
|
К1561ЛА7 |
ИЛИ-НЕ |
|
ЛЕ |
К1531ЛЕ8, |
|
|
|
К1561ЛЕ1 |
И |
|
ЛИ |
К555ЛИ1, |
|
|
|
К1564ЛИ3 |
ИЛИ |
|
ЛЛ |
К555ЛЛ1 |
НЕ |
|
ЛН |
К555ЛН1, |
|
|
|
К561ЛН2 |
5. Модуляторы: |
|
|
|
амплитудные |
|
МА |
|
импульсные |
|
МИ |
|
частотные |
|
МС |
|
фазовые |
|
МФ |
|
|
257 |
|
|

|
|
Продолжение табл. 10.2 |
|
1 |
2 |
|
3 |
6. Наборы элементов: |
|
|
|
диодов |
НД |
|
|
конденсаторов |
НЕ |
|
|
резисторов |
НР |
|
|
транзисторов |
НТ |
|
К504НТ1, |
|
|
|
К152НТ5 |
7. Преобразователи: |
|
|
|
цифро-аналоговые |
ПА |
|
К572ПА2, |
|
|
|
К1108ПА1 |
аналого-цифровые |
ПВ |
|
К572ПВ4, |
|
|
|
К1108ПВ2 |
код-код |
ПР |
|
К155ПР7 |
8. Схемы вычислительных средств: |
|
|
|
сопряжения с магистралью |
ВА |
|
КР580ВА87 |
синхронизации |
ВБ |
|
|
управления вводом-выводом |
ВВ |
|
КР580ВВ51 |
контроллеры |
ВГ |
|
КР580ВГ75, |
|
|
|
КР1810ВГ89 |
микроЭВМ |
ВЕ |
|
КР1816ВЕ51 |
микропроцессоры |
ВМ |
|
КР580ВМ80, |
|
|
|
КР1810ВМ86 |
управления прерыванием |
ВН |
|
КР580ВН59, |
|
|
|
КР1810ВН59 |
управления памятью |
ВТ |
|
КР580ВТ57 |
микропрограммного управления |
ВУ |
|
|
9. Схемы запоминающих устройств: |
|
|
|
ассоциативные |
РА |
|
К589РА04 |
ПЗУ масочные |
РЕ |
|
КР568РЕ3 |
ПЗУ матрицы |
РВ |
|
|
ПЗУ однократного программирования |
РТ |
|
К556РТ16 |
РПЗУ (перепрограммируемые, т.е. |
РР |
|
К573РР2 |
многократно программируемые ПЗУ) |
|
|
|
РПЗУ* с ультрафиолетовым стирани- |
РФ |
|
К573РФ4 |
ем |
|
|
|
РПЗУ* на ЦМД |
РЦ |
|
|
ОЗУ |
РУ |
|
К537РУ10, |
|
|
|
К565РУ5 |
10. Схемы источников электропитания: |
|
|
|
выпрямители |
ЕВ |
|
|
стабилизаторы напряжения импульс- |
ЕК |
|
|
ные |
|
|
|
258 |
|
|
|

|
|
Окончание табл. 10.2 |
|
1 |
2 |
|
3 |
стабилизаторы напряжения непрерыв- |
ЕН |
|
К142ЕН5, К142ЕН6 |
ные |
|
|
|
стабилизаторы тока |
ЕТ |
|
|
11. Схемы сравнения: |
|
|
|
амплитудные |
СК |
|
КР1100СК2 |
по напряжению (компараторы) |
СА |
|
К554СА2, |
|
|
|
К1401СА2 |
12. Схемы цифровых устройств: |
|
|
|
АЛУ |
ИА |
|
|
шифраторы |
ИВ |
|
К555ИВ3, |
|
|
|
К1564ИВ3 |
дешифраторы |
ИД |
|
К555ИД18, |
|
|
|
К564ИД4 |
счетчики |
ИЕ |
|
К555ИЕ6, |
|
|
|
К1561ИЕ11 |
регистры |
ИР |
|
К555ИР35, |
|
|
|
К564ИР12 |
полусумматоры |
ИЛ |
|
|
сумматоры |
ИМ |
|
К555ИМ6, |
|
|
|
К564ИМ1 |
прочие |
ИП |
|
|
JK-триггеры (универсальные) |
ТВ |
|
К555ТВ6, |
|
|
|
КР531ТВ11 |
JK-триггеры (комбинированные) |
ТК |
|
К155ТК1 |
D-триггеры |
ТМ |
|
К555ТМ7, |
|
|
|
К564ТМ3 |
10.15. Операционный усилитель
Операционный усилитель (ОУ) представляет собой разновидность усилителей постоянного тока с верхней границей амплитудночастотной характеристики fв=102–105 Гц. ОУ изначально был спроектирован для выполнения математических операций (отсюда его название) путём использования напряжения как аналоговой величины. Такой подход лежит в основе аналоговых компьютеров, в которых ОУ использовались для моделирования базовых математических операций (сложение, вычитание, интегрирование, дифференцирование
ит. д.).
Внастоящее время ОУ применяются при создании электронных устройств самого различного назначения (стабилизация напряжения,
259
генерация сигналов различной формы и т.д.). ОУ часто выполняют многокаскадными с непосредственными связями. На входе ОУ включается дифференциальный усилительный каскад для уменьшения дрейфа нуля, затем – промежуточные усилительные каскады для получения необходимого усиления и на выходе – повторитель напряжения для уменьшения выходного сопротивления усилителя. Разработка ОУ – сложная задача. До появления микроэлектронных устройств ОУ содержали десятки транзисторов и других дискретных элементов. Сейчас это не затрудняет практического применения ОУ, так как они изготовляются в виде интегральных микросхем.
|
|
|
+Е |
|
Схемное обозначение ОУ приве- |
|
|
|
|
|
дено на рис. 10.39. Выводы имеют |
||
|
|
|
|
|
||
Uвх– |
|
|
|
|
следующее назначение: Uвх+ – неин- |
|
|
– |
|
|
|||
|
|
Uвых |
вертирующий вход; Uвх– – инверти- |
|||
|
|
|
||||
|
|
|
|
|||
|
|
|
|
|
рующий вход; Uвых – выход; +Е – |
|
|
|
+ |
|
|
||
Uвх+ |
|
|
плюс источника питания; –Е – минус |
|||
|
|
–Е |
|
источника питания. |
||
|
|
|
Указанные пять выводов присут- |
|||
Рис. 10.39. Схемное обозначение |
||||||
ствуют в любом ОУ, они необходимы |
||||||
операционного усилителя |
для его функционирования. Часто |
|||||
|
|
|
|
|
||
выводы питания на схеме не изображают, чтобы не загромождать её несущественными деталями, при этом способ подключения этих выводов явно не указывается или считается очевидным. Наиболее часто встречающиеся схемные обозначения ОУ показаны на рис. 10.40.
 ∞
∞
+
а |
б |
в |
Рис. 10.40. Наиболее часто встречающиеся схемные обозначения ОУ
Один из входов, обозначенный знаком «+», называют неинвертирующим (прямым), так как сигнал на выходе и сигнал на этом входе имеют одинаковую полярность. Второй вход, обозначенный знаком «–» (его также обозначают знаком инверсии «o»), называют инвертирующим, так как сигнал на выходе по отношению к сигналу на этом входе имеет противоположную полярность.
260

Основные характеристики ОУ:
–высокий коэффициент усиления по напряжению в режиме холостого хода Коу=104–105;
–большое входное сопротивление Rвх=104–107 Ом;
–малое выходное сопротивление Rвых=10–50 Ом.
Эти свойства обеспечивают возможность каскадного включения ОУ, высокую точность выполнения операций и универсальность применения. Обычно ОУ охватывают отрицательной обратной связью с выхода на инвертирующий вход.
Дифференциальное напряжение на входе ОУ
Uдиф= Uвх+–Uвх–. (10.22)
При синфазном входном сигнале (рис. 10.41, а), когда Uсф=Uвх+=Uвх–, дифференциальное напряжение Uдиф=0. ОУ конструируют так, чтобы они как можно больше изменяли Uвых при изменении
Uдиф и как можно меньше изменяли Uвых при Uдиф=0. Если модуль |Uсф| сравнительно мал, то синфазный сигнал слабо влияет на напряжение
Uвых. Иначе его влияние, как следует из графика (рис. 10.41, б), может быть очень существенным. Если синфазный сигнал оказывается чрез-
мерно большим по модулю, то операционный усилитель может выйти из строя.
|
|
|
|
|
|
|
|
|
|
|
|
Uвых |
|
≈2 В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
–Е |
|
Uсф |
||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
+Е |
|||
|
|
|
|
|
|
|
|
|
|
0 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
Rн |
|
|
Uвых |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Uсф |
|
|
|
|
|
|
|
|
|
≈2 В |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
а |
|
|
|
|
|
|
б |
|||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 10.41. Схема подключения ОУ к синфазному сигналу (а) и график зависимости выходного напряжения ОУ от синфазного сигнала
Влияние синфазного сигнала при его малых по модулю значениях характеризуют коэффициентом усиления синфазного сигнала Kсф и коэффициентом ослабления синфазного сигнала Kос.сф.
Ксф = |
U |
вых |
, Кос.сф = |
Коу |
. |
(10.23) |
|
|
Ксф |
||||
|
Uсф |
|
|
|||
Коэффициент Коу всегда положителен. Коэффициенты Kсф и Kос.сф могут быть как положительными, так и отрицательными. Коэффици-
261

ент Kсф обычно близок к единице, поэтому модуль коэффициента Kос.сф обычно такого же порядка, что и коэффициент Kоу, т.е. 104–105.
Усилительные свойства ОУ определяются его амплитудными характеристиками по инвертирующему и неинвертирующему входам при разомкнутой цепи нагрузки (рис. 10.42, а).
Uвых |
Е |
Uвых |
|
|
1 2 Е
|
0 |
Uвх.нас |
Uвх |
0 |
Uвх |
2 |
|
||||
|
1 |
|
2 |
1 |
|
|
|
|
|
||
|
|
–Е |
|
|
|
|
|
а |
|
|
б |
Рис. 10.42. Амплитудные характеристики реального (а) и идеального (б) ОУ: 1 – по инвертирующему входу;
2 – по неинвертирующему входу
Для типового значения ЭДС источника питания Е=10 В насыщение транзистора повторителя напряжения выходного каскада про-
изойдет при Uвх ≈ |
Е |
= ±(0,1...1) мВ. Дальнейшее увеличение Uвх не |
|
||
|
Коу |
|
вызывает изменение напряжения на выходе.
Пренебрегая малым значением напряжения насыщения Uвх.нас, введем понятие идеального ОУ, у которого коэффициент усиления напряжения в режиме холостого хода и входное сопротивления име-
ют большие значения, т.е. Коу→∞ и Rвх→∞.
Это равносильно тому, что напряжение и ток на входе идеального ОУ в режиме усиления сигнала равны нулю
U |
вх |
= |
Uвых |
= 0 ; I |
вх |
= |
Uвх |
= 0 , |
(10.24) |
|
К |
|
|
||||||||
|
|
оу |
|
R |
|
|||||
|
|
|
|
|
|
вх |
|
|||
а его амплитудные характеристики по инвертирующему и неинвертирующему входам имеют вид ломаных линий 1 и 2 на рис. 10.42, б. В режиме насыщения идеального ОУ напряжение Uвх ≠ 0 , ток Iвх=0. Ес-
ли ОУ применяется только в режиме усиления сигналов, то на схеме
262

можно не указывать выводы питания (см. рис. 10.40), если же ОУ применяется и в режиме насыщения, то указанные на схеме выводы питания (см. рис. 10.39) поясняют равенство напряжений на выходе ОУ в режиме насыщения и источника питания Е и –Е (см. рис. 10.42).
Большое значение коэффициента усиления по напряжению позволяет использовать глубокую отрицательную обратную связь для создания на основе ОУ устройств различного функционального назначения.
На рис. 10.43 представлена схема неинвертирующего усилителя, в котором используется последовательная отрицательная обратная связь по напряжению.
Rвт
uвх
ec=uc
Rос
Rн uвых
R1

Рис. 10.43. Неинвертирующий усилитель
Коэффициент усиления неинвертирующего усилителя Кни, построенного на ОУ с достаточно большим усилением, практически зависит только от параметров обратной связи
Кни =1+ |
Rос . |
(10.25) |
|
R1 |
|
Это полезное свойство позволяет проектировать системы с очень стабильным коэффициентом передачи, необходимые, например, при измерениях и обработке сигналов.
Фаза выходного сигнала неинвертирующего усилителя совпадает с фазой входного сигнала.
Если Rос=0, то Кни=1, а uвых=uвх, т.е. неинвертирующий усилитель превращается в повторитель напряжения с высоким входным и низким выходным сопротивлениями (рис. 10.44).
263

Rвт
uвх |
|
ec=uc |
|
Rн |
uвых |
R1 |
|
Рис. 10.44. Повторитель напряжения
Схема инвертирующего усилителя представлена на рис. 10.45. В инвертирующем усилителе используется параллельная отрицательная обратная связь по напряжению. Отрицательный характер обратной связи обеспечивается цепью обратной связи с сопротивлением Rос, соединяющей выход усилителя с его инвертирующим входом.
Rос
Rвт R1
uвх
ec=uc
Rн 
 uвых
uвых
Рис. 10.45. Инвертирующий усилитель
Входной сигнал подается на инвертирующий вход, а неинвертирующий вход подключается к общему проводу. Коэффициент усиления определяется соотношением сопротивлений Rвт, R1 и Rос и находится по формуле
Kинв = − |
|
Rос |
. |
(10.26) |
R1 |
|
|||
|
+ Rвт |
|
||
Фаза выходного сигнала противоположна фазе входного сигнала.
264

Основное отличие от инвертирующего усилителя заключается в повышенном входном сопротивлении, которое равно сумме сопротивлений Rвт и Rос и может достигать 10 МОм и выше. Его выходное сопротивление, как и инвертирующего усилителя, мало.
На рис. 10.46 представлена схема усилителя, дифференцирующего сигнал инвертирующего входа
uвых( t ) = −RC duвх( t ) . |
(10.27) |
|
|
dt |
|
С |
R |
|
Rвт |
|
|
uвх(t) |
|
|
ec=uc(t) |
|
Rн uвых(t) |
Рис. 10.46. Дифференцирующий усилитель
На рис. 10.47 представлена схема усилителя, интегрирующего сигнал инвертирующего входа.
Rвт |
R |
С |
|
|
|
||
|
|
uвх(t) |
|
ec=uc(t) |
|
Rн |
uвых(t) |
Рис. 10.47. Интегрирующий усилитель
Выходное напряжение этого усилителя
uвых( t ) = − |
1 |
∫uвх( t )dt . |
(10.28) |
|
RC |
||||
|
|
|
На базе ОУ может быть построен компаратор – устройство, сравнивающее два сигнала и выдающее логическую единицу, если сигнал на неинвертирующем входе больше чем на инвертирующем, и логический ноль, если сигнал на неинвертирующем входе меньше, чем на инвертирующем. Выпускаются специальные интегральные схемы, предназначенные для использования в качестве компараторов.
265

uвх(t) |
|
e–(t) |
Rн |
uвых(t) |
|
e+(t) |
|
Рис. 10.48. Схема компаратора на базе ОУ
ОУ в этом случае применяется как элемент сравнения и усилитель. Схема компаратора приведена на рис. 48. Компараторы используются для построения схем аналого-цифровых преобразователей.
10.16. Генераторы синусоидальных колебаний
Различают генераторы синусоидальных колебаний с самовозбуждением (автогенераторы) и с внешним (независимым) возбуждением. Последние являются усилителями мощности высокой частоты, работающими на резонансную нагрузку.
Схема автогенератора обычно содержит усилитель, охваченный положительной обратной связью. Наиболее часто применяется обратная связь по напряжению. Для построения автогенератора синусоидальных колебаний элементы схем либо усилителя, либо обратной связи должны обладать явно выраженными частотными свойствами. Наибольшее распространение получили два типа усилительных схем: с резонансными (колебательными) контурами и с резистивноемкостными цепями.
Автогенераторы, выполненные на основе схемы резонансного усилителя, часто называют автогенераторами типа LC, а автогенераторы, построенные на основе схемы усилителя на RC-цепях,– автогенераторами типа RC. Генерирование колебаний с частотами меньше 15–20 кГц на резонансных LC-контурах затруднено и неудобно из-за их громоздкости. В низкочастотном диапазоне широко используются генераторы типа RC. Они могут генерировать весьма стабильные синусоидальные колебания в сравнительно широком диапазоне частот от долей герца до сотен килогерц. Кроме того, они имеют малые габариты и массу. Конечно, наиболее полно преимущества генераторов типа RC проявляются в области низких частот.
266

Для анализа установившегося режима работы автогенератора воспользуемся комплексным методом.
Напряжения на выходе автогенератора и на входе четырехполюсника цепи обратной связи одинаковые (рис. 10.49, а)
U&вых =U&вх.ос |
(10.29) |
и удовлетворяют условию |
|
U&вых = Кu у Кu осU&вх.ос, |
(10.30) |
где Кu у = Кu у( ω)еjϕ′( ω ) |
|
– коэффициент усиления по напряжению |
|||||||||||||||||||||||||||||||||||||
усилителя; |
Кu ос |
= Кu ос( ω)еjϕ′′( ω ) |
|
– коэффициент передачи по напря- |
|||||||||||||||||||||||||||||||||||
жению четырехполюсника обратной связи. |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
Из выражений (10.29) и (10.30) следует |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
Кu у Кu ос = Кu у( ω) Кu ос( ω)еj[ ϕ′( ω )+ϕ′′( ω )] =1, |
(10.31) |
|||||||||||||||||||||||||||||||||
то есть |
|
|
|
|
|
Кu у( ω) Кu ос( ω) =1; |
(10.32) |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
′ |
|
′′ |
(10.33) |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
ϕ ( ω) +ϕ ( ω) = 2πn , |
|||||||||||||||||||||||||||||
где n=0,1,2,3,… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
С1 |
|
|
|
|
|
|
|
|
|
R3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
Кu у |
|
U&вых |
|
|
|
Rн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uвх |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Кu ос |
|
U&вх.ос |
С2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rн |
|
|
|
|
|
uвых |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
R4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
R2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Рис. 10.49. Обратная связь по напряжению (а) и схема RC-автогенератора на основе ОУ, моста Вина в цепи положительной обратной связи и делителя напряжения из резисторов R3 и R4 в цепи отрицательной обратной связи
Условие (10.32) называется балансом амплитуд. Условие (10.33) называется балансом фаз. Условия (10.32) и (10.33) должны выполняться при одной угловой частоте работы автогенератора ω.
Самовозбуждение генератора, начиная с момента подачи питания, определяется условием
267

Кu у( ω) Кu ос( ω) >1, |
(10.34) |
которое после завершения переходного процесса переходит в условие установившегося режима работы автогенератора (10.32) вследствие уменьшения Кu у при увеличении амплитуды синусоидальных колебаний, обусловленного нелинейностью транзисторов.
Схема RC-автогенератора на основе ОУ, моста Вина в цепи положительной обратной связи и делителя напряжения из резисторов R3 и R4 в цепи отрицательной обратной связи представлена на рис. 10.49, б.
Для генерации колебаний с максимальной амплитудой и угловой
частотой ω0 = |
1 |
цепь отрицательной обратной связи должна |
|
R1R2C1C2 |
|||
|
|
удовлетворять соотношению R3 = 2 .
R4
10.17. Генераторы линейно изменяющегося напряжения
Линейно изменяющимся (пилообразным) напряжением называют импульсное напряжение, которое в течение некоторого времени изменяется практически по линейному закону, а затем возвращается к исходному уровню.
Линейно изменяющееся напряжение характеризуется следующи-
|
|
|
|
|
|
|
|
|
|
|
|
|
ми основными параметрами (рис. |
||||||||||||||||||||
|
u |
|
|
|
|
10.50): |
|
периодом T, длительно- |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
стью рабочего хода Тр, длитель- |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
Um |
|
|
|
|
|
|
|
|
|
|
ностью |
|
обратного |
хода Тобр, ам- |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
плитудой Um, коэффициентом не- |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
линейности ε. |
|
|
|
|
|
|||||||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
du |
|
|
|
|
|
|
|
|
du |
|
|
|
|||
|
|
|
|
|
Tp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
Tобр |
|
|
|
|
|
t =0 − |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ε |
= |
|
dt |
|
dt |
|
t =T |
p |
, (10.35) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
du |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
t =0 |
|
|
||||||
|
|
|
|
Рис. 10.50. Импульсы линейно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
du |
|
|
|
|
|
du |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
изменяющегося напряжения |
|
где |
|
|
|
|
, |
|
|
|
|
|
– соответст- |
||||||||||||||||
|
|
|
|
|
|
dt |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t =0 |
|
|
t =Tp |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
венно скорость изменения напряжения в начале и в конце рабочего хода.
268

снизится до уровня напряжения Uоткр на тиристоре в открытом состоянии (Uоткр ≈1 В), после чего тиристор закроется, и процесс зарядки конденсатора постоянным током I=E/R повторится (рис. 10.51, б). Очевидно, для того чтобы операционный усилитель не входил в насыщение, необходимо выполнить условие Uоп< Uвых max.
Подобные генераторы широко применяются в аппаратуре связи, телевидении, радиолокации. Наиболее часто их используют для создания временной развертки луча в электронно-лучевых трубках осциллографов, телевизоров и т. п.
Другой важной областью применения этих генераторов является преобразование напряжения в частоту для точных измерений постоянных напряжений, так как измерение частоты может быть реализовано с наивысшей возможной точностью.
10.18.Мультивибраторы на транзисторах
Вимпульсной технике широко применяются генераторы релаксационных колебаний. Релаксационными называют периодические колебания несинусоидальной формы, в которых медленные изменения чередуются со скачкообразными. Форма колебаний может быть прямоугольной, пилообразной и т.д. Генераторы таких колебаний могут работать в автоколебательном или ждущем режиме и используются в качестве запускающих и переключающих устройств, для деления частоты и других целей. Одним из видов релаксационных генераторов является мультивибратор, вырабатывающий колебания практически прямоугольной формы. Мультивибратор является импульсным устройством, в котором усилительный элемент работает в ключевом режиме.
Основная схема автоколебательного мультивибратора на транзисторах типа p-n-p приведена на рис. 10.52.
Схема представляет собой двухкаскадный усилитель с емкостными связями. Выход каждого каскада соединен со входом другого, что обеспечивает глубокую, практически 100%-ную положительную обратную связь. Если транзисторы, конденсаторы и резисторы обоих плеч мультивибратора одинаковы, его называют симметричным.
Рассмотрение принципа работы мультивибратора начнем с мо-
мента t0, когда транзистор VT2 находится в состоянии насыщения, а транзистор VT1 – в состоянии отсечки. Конденсатор С1 разряжен, кон-
270

денсатор С2 заряжен до напряжения, почти равного напряжению источника питания.
|
|
|
|
|
|
|
|
|
|
uб1 |
|
|
|
|
|
|
Rб1 |
|
|
–Ек |
t |
Rк1 |
|
Rб2 |
|
|
R |
uк1 |
||||
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
к2 |
|
|
– |
+ |
+ |
– |
|
|
t |
uк1 |
С2 |
С1 |
uк2 |
uб2 |
|
t |
|
|
|
|
|
|
|
|
VT1 |
VT2 |
0 |
uк2 |
t1 |
t |
|
|
|
t0 |
|||
|
|
|
|
t2 |
||
|
|
а |
|
tи |
tп |
б |
|
|
|
|
|
Рис. 10.52. Основная схема автоколебательного мультивибратора (а) и диаграмма напряжений (б)
Насыщенное состояние VT2 обеспечивается соответствующим выбором сопротивления резистора Rб2 (Rб≤βRк), а состояние отсечки VT1 тем, что к его эмиттерному переходу через открытый транзистор VT2 приложено запирающее напряжение от С1. Начиная с момента t0, происходит относительно быстрый заряд С2 до напряжения –Ек и медленный перезаряд С1 по цепи –Ек-Rб1-С1-VT2, причем конденсатор С1 стремится перезарядиться от –Ек до +Ек. В процессе перезаряда запирающее напряжение для VT1 уменьшается. Когда оно станет близким к нулю, начинается процесс отпирания VT1. При отпирании VT1 конденсатор С2 положительным выводом подключается к базе VT2, что вызывает процесс его запирания. Благодаря положительной обратной связи, процесс развивается лавинообразно и заканчивается переходом мультивибратора в другое квазиустойчивое состояние: транзистор VT1 открыт, а VT2 – закрыт (момент времени. t1). После этого начинается процесс перезаряда С2, продолжающийся до момента времени t2, когда произойдет быстрый переход транзистора в прежнее состояние. В дальнейшем процессы повторяются.
Поскольку переход транзисторов из закрытого состояния в открытое происходит скачкообразно, напряжение на коллекторах имеет практически прямоугольную форму. Период колебаний мультивибратора определяется временем, в течение которого разряжаются кон-
денсаторы и которое приблизительно равно |
|
tи = tп ≈ 0,7RбС, |
(10.39) |
где tи – длительность импульса; tп – длительность паузы. |
|
271

Поскольку длительность периода Т складывается из равных продолжительностей импульса и паузы, то
Т = tи +tп ≈1,4RбС. |
(10.40) |
|||||||
Частота импульсов |
|
|
1 |
|
0,7 |
|
|
|
f |
= |
≈ |
. |
(10.41) |
||||
T |
|
|||||||
|
|
|
R C |
|
||||
|
|
|
|
|
б |
|
||
Практические схемы автоколебательных мультивибраторов обычно содержат несколько дополнительных элементов, предназначенных для улучшения формы выходного напряжения и повышения стабильности работы.
10.19.Триггеры и триггерные устройства
10.19.1.Общие сведения
Как и мультивибратор, триггер является импульсным устройством, в котором усилительный элемент работает в ключевом режиме. Триггером называется устройство, обладающее двумя устойчивыми состояниями и способное скачком переходить из одного состояния в другое под воздействием внешнего управляющего сигнала.
Триггеры относятся к логическим устройствам, у которых состояние на выходе определяется состояниями на входах не только в данный момент времени, но и предыдущим состоянием.
Развитие полупроводниковой электроники привело к тому, что вместо триггера на дискретных элементах стали применяться триггеры, выполненные в виде интегральных микросхем.
С применением в вычислительной технике триггеров связано использование двоичной системы счисления. Триггер способен запоминать и хранить один бит информации (один разряд двоичного числа). Один выход триггера называется прямым Q , другой – инверсным Q .
Одно устойчивое состояние триггера, когда на прямом выходе низкий уровень напряжения, обычно принимают за «0», другое – за «1». Число входов зависит от структуры и функций, выполняемых триггером.
По способу записи информации триггеры делят на асинхронные и синхронизируемые (тактируемые). В асинхронных триггерах информация записывается непосредственно в момент изменения сигнала на его информационных входах. Синхронный триггер имеет синхронизирующий вход С. Такой триггер изменяет свое состояние лишь в
272
строго определенные (тактовые) моменты времени, соответствующие действию активного сигнала на его синхронизирующем входе С.
Тактируемые триггеры могут быть с потенциальным и динамическим управлением. У первых из них информация записывается в течение времени, при котором уровень сигнала С=1. В триггерах с динамическим управлением информация записывается только в течение перепада напряжения на входе синхронизации. Динамические входы изображают на схемах треугольником. Если вершина треугольника обращена в сторону микросхемы, то триггер срабатывает по фронту входного импульса, если от нее – по спаду. В схемах встречаются также обозначения «/» и «\». Первое обозначает фронт, второе – спад. В таком триггере информация на входе может быть задержана на один такт по отношению к входной информации.
Алгоритм функционирования триггеров обычно поясняется таблицами истинности, которые содержат информацию как о состоянии триггера Q(t) до поступления управляющих входных сигналов, так и о состоянии триггера Q(t+1) после подачи сигналов на входы.
Основные типы триггеров в интегральном исполнении носят следующие названия: RS-триггеры, D-триггеры, Т-триггеры и JK-триг- геры.
10.19.2. Триггеры на транзисторах
На рис. 10.53 приведена схема триггера на биполярных транзисторах типа p-n-p с коллекторно-базовыми связями.
Как и мультивибратор, триггер представляет собой двухкаскадный усилитель, у которого выход первого каскада соединен со входом второго, а выход второго – со входом первого (100%-ная положительная обратная связь). Однако в отличие от мультивибратора связь между каскадами не емкостная, а гальваническая. Обычно применяется симметричная схема, когда RК1=RК2, Rб1=Rб2, RЗ1=RЗ2, а транзисторы имеют одинаковые параметры. Такой триггер называется симметричным.
В первый момент после подачи питающего напряжения оба транзистора будут стремиться открыться, так как на их базы через Rб1 и RКб2 подаются отрицательные отпирающие напряжения. Однако такое состояние будет неустойчивым. В силу случайных причин изменение токов и напряжений на электродах транзисторов будет неодинаковым, в результате чего триггер обязательно окажется в одном из двух устойчивых состояний.
273

Rк1 |
|
|
–Ек |
uвх1 |
|
|
Скб1 |
Скб2 |
Rк2 |
0 |
t |
||
|
|
|||||
|
|
|
||||
Q |
Rб2 |
Rб1 |
Q |
uвх2 |
t |
|
0 |
||||||
uвых1 |
|
|
uвых2 |
uб1 |
t |
|
VT1 |
|
|
VT2 |
0 |
||
|
|
t |
||||
Свх1 |
VD1 |
VD2 |
Свх2 |
0 |
||
Ек |
||||||
uвх1 |
Rвх1 |
Rвх2 |
uвх2 |
uк1 |
||
|
|
uб1 |
|
|||
|
|
|
|
t |
||
|
|
|
0 |
0 |
||
|
RЗ1 |
RЗ2 |
t |
|||
|
|
0 |
||||
|
|
|
|
Ек |
||
|
|
|
+Еб |
uк2 |
||
|
|
|
|
|||
|
|
а |
|
|
б |
Рис. 10.53. Симметричный триггер с коллекторно-базовыми связями и раздельным запуском (а) и временные диаграммы его работы (б)
Допустим, что коллекторный ток VT2 по какой-либо причине уменьшился. Это приведет к увеличению напряжения на его коллекторе, а значит и к увеличению входного напряжения и тока VT1. Рост тока VT1 сопровождается понижением напряжения на его коллекторе, являющегося входным для VT2, а следовательно, дальнейшим снижением его тока. Это очень быстро приведет к тому, что VT1 окажется открытым, а VT2 закрытым. В таком состоянии триггер может находитьсся в течение сколь угодно длительного времени. Чтобы не произошло изменение состояния триггера вследствие случайных причин, на базу закрытого транзистора через резистор RЗ2 подается запирающее напряжение +Еб. В таком состоянии триггера на коллекторе VT1 напряжение близко к нулю, а на коллекторе VT2 практически рав-
но –Ек.
Чтобы перевести триггер в другое устойчивое состояние, необходим внешний запускающий сигнал. Различают три способа запуска триггера:
–раздельный запуск импульсами одной и той же полярности, в разное время на базы разных транзисторов;
–запуск импульсами чередующейся полярности, подаваемыми на базу одного из транзисторов;
274
– запуск импульсами одинаковой полярности одновременно на базы обоих транзисторов (счетный запуск).
Простейшей запускающей цепью является дифференцирующая RC-цепь, формирующая короткий импульс, который через диод поступает на базу транзистора.
На рис. 10.53, а приведена схема с раздельным запуском, которая имеет два входа. При этом положительный запускающий импульс подается раздельно на вход uвх1 через дифференцирующую цепь Rвх1Свх1, диод VD1 на базу транзистора VT1 или на вход uвх2 через дифференцирующую цепь Rвх2Свх2, диод VD2 на базу транзистора VT2 (см. рис. 10.53, а, б).
Как установлено выше, триггер находится в одном из двух устойчивых состояний, при котором транзистор VT1 открыт, а транзистор VT2 закрыт. Чтобы перевести триггер в другое устойчивое состояние, необходимо подать положительный импульс на вход uвх1 через дифференцирующую цепь Rвх1Свх1, диод VD1 на базу открытого транзистора VT1, что приводит к его запиранию. Запирание VT1 вызовет описанный выше лавинообразный процесс, в результате которого VT2 будет открыт, а VT1 закрыт. Новое состояние в отсутствие внешних запускающих импульсов будет также устойчивым.
Если запускающий положительный импульс подать на базу закрытого транзистора, то состояние триггера не изменится. Если диоды включить в противоположном направлении, то на базы транзисторов будут поступать отрицательные импульсы, которые открывают транзисторы. На состояние открытого транзистора эти импульсы влиять не будут, а закрытый транзистор начнет открываться.
В практических схемах диоды включаются таким образом, чтобы запускающий импульс работал на закрывание транзистора, так как в этом случае потребляется меньший ток от источника импульса.
Симметричный триггер с раздельным запуском (рис. 10.50, а), представляет собой RS-триггер.
На рис. 10.54 приведена схема триггера с запуском импульсами чередующейся полярности, подаваемыми на базу одного транзистора. Так как импульсы имеют разную полярность, диод в цепи запуска такого триггера отсутствует.
На рис. 10.55 приведена схема триггера со счетным входом. Для получения такого триггера входные цепи триггера с раздельным запуском объединяются. Полученный общий вход называется счетным входом, или Т-входом. Сам триггер называется Т-триггером.
275

Rк1 |
|
|
–Ек |
Скб1 |
Скб2 |
Rк2 |
|
|
|
||
Q |
Rб2 |
Rб1 |
Q |
uвых1 |
|
|
uвых2 |
VT1 |
|
|
VT2 |
Свх |
|
|
|
uвх |
Rвх |
|
|
|
|
|
|
|
RЗ1 |
RЗ2 |
0 |
|
|
+Еб
Рис. 10.54. Триггер с запуском импульсами чередующейся полярности, подаваемыми на базу одного транзистора
|
|
|
|
|
|
|
|
|
|
|
|
|
|
–Ек |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rк1 |
|
|
|
|
|
Скб1 |
Скб2 |
|
|
|
|
Rк2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
Rб2 |
Rб1 |
Q |
uвых1 |
|
|
uвых2 |
VT1 |
|
|
VT2 |
RЗ1  RЗ2
RЗ2
+Еб
0
Rвх1 |
|
VD1 VD2 |
|
Rвх2 |
|
|
Свх1 Свх2  Т
Т  uвх
uвх
Рис. 10.55. Триггер со счетным входом
276

В этой схеме на катоды диодов через сопротивления Rб1, Rб2 подается высокое отрицательное напряжение, в результате чего один из диодов всегда будет закрыт. Запускающий импульс поступит через диод, подключенный к базе открытого транзистора, который начнет закрываться. Если, например, закрыт транзистор VT1, будет закрыт диод VD1, подключенный к базе VT1, запускающий импульс поступит на базу VT2, в результате чего триггер перейдет в другое устойчивое состояние, когда будет закрыт VT2.
Т-триггер является делителем частоты входных импульсов на 2.
10.19.3. Триггеры на интегральных микросхемах
RS-триггер
Асинхронный RS-триггер имеет два информационных входа R и S. Входы S и R названы по первым буквам английских слов set – установка и reset – сброс. При S=1 и R=0 на выходах триггера появляются сигналы: на прямом выходе Q=1, на инверсном Q =0. При S=0 и R=1
выходные сигналы триггера принимают противоположные состояния (Q=0, Q =1). Этот триггер не имеет тактового входа. Простейший RS-
триггер можно реализовать на логических элементах ИЛИ-НЕ и И-НЕ, как показано на рис. 10.56.
R |
1 |
Q |
R |
Q |
|
& |
1 |
Q |
& |
Q |
S |
|
S |
|
а |
|
б |
|
Рис. 10.56. RS-триггер, реализованный на логических элементах ИЛИ-НЕ (а) и И-НЕ (б)
Схемное обозначение и таблица истинности, поясняющая алгоритм функционирования асинхронного RS-триггера, приведены в табл. 10.3.
277

Таблица 10.3
Схемное обозначение
и таблица истинности асинхронного RS-триггера
|
|
Схемное |
|
|
|
|
Входные |
|
Состояние |
||||||
|
обозначение |
|
|
|
|
сигналы |
|
|
выхода |
||||||
|
|
|
|
|
|
|
|
|
|
R |
|
S |
Q(t) |
|
Q(t+1) |
|
|
|
|
|
|
Q |
0 |
|
0 |
0 |
|
0 |
|||
|
|
|
T |
|
|
|
|||||||||
|
|
R |
|
|
|
|
|
0 |
|
0 |
1 |
|
1 |
||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
1 |
0 |
|
1 |
|
|
|
|
|
|
|
|
|
|
0 |
|
1 |
1 |
|
1 |
|
|
S |
|
|
|
Q |
|
|
|||||||
|
|
|
|
|
|
|
|
|
1 |
|
0 |
0 |
|
0 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
1 |
|
0 |
1 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
0 |
|
Не |
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
1 |
|
определено |
RS-триггер не допускает одновременно наличие на входах активных сигналов «S=1, R=1». В этом случае не выполняется условие его функционирования, поскольку на выходах Q и Q логические уровни
перестают быть взаимно инверсными, состояние выхода оказывается неопределенным. Данные комбинации считаются запрещенными.
Режим «S=1, R=0» называют режимом записи «1», так как Q(t+1)=1; режим «S=0 и R=1» – режимом записи «0», так как Q(t+1)=0; режим «S=0, R=0» – режимом хранения информации, так как информация на выходе остается неизменной. Временная диаграмма асинхронного RS-триггера приведена на рис. 10.57.
R
 t
t
S 
 t
t
Q
 t
t
Рис. 10.57. Временная диаграмма асинхронного RS-триггера
Синхронный RS-триггер отличается от асинхронного наличием входа С для синхронизирующих тактовых импульсов. Переключение
278

У D-триггеров с потенциальным управлением информация со входа D переписывается на выход Q в течение времени, при котором синхросигнал активен С=1. При пассивном синхросигнале триггер не чувствителен к изменениям информационного сигнала.
C 
t
D 
t
Q 
t
Рис. 10.59. Временная диаграмма D-триггера со статическим управлением
Схемное обозначение и таблица истинности, поясняющая алгоритм функционирования D-триггера, приведены в табл. 10.4.
Временная диаграмма D-триггера со статическим управлением приведена на рис. 10.59.
В триггерах с динамическим управлением информация записывается (передается на выход Q) по фронту или спаду сигнала синхронизации на входе С.
|
|
|
D |
D |
ТТ |
Q |
t |
C |
|
|
C |
|
|
Q |
|
|
|
|
|
|
|
|
t |
Q
t
Рис. 10.60. Схемное обозначение и временная диаграмма D-триггера с динамическим управлением по спаду сигнала синхронизации
280
Временная диаграмма D-триггера с динамическим управлением |
|||
по спаду сигнала синхронизации приведена на рис. 10.60. |
|
||
Т-триггер |
|
|
|
Т-триггер – это устройство с двумя ус- |
|
|
|
тойчивыми состояниями и одним счетным |
D ТТ |
Q |
|
(информационным) входом Т. Счётным он на- |
|||
C |
|
||
зывается потому, что он подсчитывает коли- |
|
||
чество импульсов, поступивших на его вход. |
|
Q |
|
Триггер переключается каждый раз в |
|
|
|
противоположное состояние по фронту или |
Рис. 10.61. Т-триггер |
||
по спаду управляющего сигнала на входе Т. |
на базе D-триггера |
||
Т-триггер может быть выполнен на основе D- |
|
|
|
триггера с динамическим управлением путем соединения инверсного |
|||
выхода со входом D (рис. 10.61). Счетный триггер из D-триггера с по- |
|||
тенциальным управлением получить нельзя. |
|
|
|
Т-триггеры используются при построении схем различных счёт- |
|||
чиков, поэтому в составе больших интегральных схем различного на- |
|||
значения обычно есть готовые модули этих триггеров. |
|
||
|
T |
|
Q |
t |
|
ТТ |
Q |
|
Т |
||
t |
||
Q |
||
|
||
|
Q |
|
|
t |
Рис. 10.62. Схемное обозначение Т-триггера, работающего по спаду синхронизирующего сигнала, и его временная диаграмма
Схемное обозначение Т-триггера, работающего по спаду синхронизирующего сигнала, и его временная диаграмма приведены на рис. 10.62.
JK-триггер
JK-триггер имеет два выхода: прямой Q и инверсный Q .
JK-триггер имеет пять входов: R – асинхронный вход установки в состояние «0» (Q=0); S – асинхронный вход установки в состояние «1»
281

(Q=1); К – синхронизируемый вход установки в состояние «0» (Q=0); J – синхронизируемый вход установки в состояние «1» (Q=1); С – синхронизирующий вход.
Асинхронные входы R и S работают так же, как в RS-триггере, независимо от сигналов на остальных входах: режим «S=1, R=0» – режим записи «1»; режим «S=0 и R=1» – режим записи «0»; режим «S=R=0» – режим хранения информации. Не допускается одновременно наличие на входах R и S активных сигналов «S=R=1».
При S=R=0 логика работы входов J, K и C такова: если на входе J логическая 1, а на входе K – логический 0, то по спаду синхроимпульса на входе C триггер установится в состояние «1». Если на входе J – логический 0, а на входе K – логическая 1, то по спаду синхроимпульса на входе C триггер установится в состояние «0». В случае, когда и на входах J и K логические нули, то независимо от сигнала на входе C состояние триггера не меняется. И последний режим работы, когда на входах J и K логические единицы, JK-триггер работает в режиме делителя частоты сигнала на входе С. Это означает, что по заднему фронту каждого тактового импульса состояние триггера меняется на противоположное.
Таблица 10.5
Схемное обозначение и таблица истинности JK-триггера
|
|
|
Схемное |
|
|
|
|
|
|
Входы |
|
Состояние |
Примечание |
||||||
|
|
|
обозначение |
|
|
|
|
|
|
|
|
|
|
выходов |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
С |
K |
|
J |
Q(t) |
Q(t+1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
* |
|
* |
0 |
0 |
Режим хранения информации |
|
|
|
S |
|
TT |
|
Q |
0 |
|
* |
|
* |
1 |
1 |
|||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
0 |
|
0 |
0 |
0 |
Режим хранения информации |
|
|
|
J |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
1 |
|
0 |
|
0 |
1 |
1 |
||||||
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
0 |
|
1 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
Режим установки единицы J=1 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Q |
1 |
|
0 |
|
1 |
1 |
1 |
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
R |
|
|
|
|
|
|
|
|
1 |
|
1 |
|
0 |
0 |
0 |
Режим записи нуля K=1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
1 |
|
1 |
|
0 |
1 |
0 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
1 |
0 |
1 |
Счетный режим триггера J=K=1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
1 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Примечания: 1. * – любое состояние входа.
2. Таблица справедлива при R=S=0.
282

Схемное обозначение и таблица истинности JK-триггера приведены в табл. 10.5.
Из таблицы видно, что при J=1 и K=0 триггер по тактовому импульсу устанавливается в состояние 1 (Q=1); при J=0 и К=1 триггер по тактовому импульсу устанавливается в состояние «0» (Q=0); при J=K=0 триггер хранит ранее принятую информацию независимо от сигнала на синхронизирующем входе С; при J=K=1 состояние выхода Q триггера с каждым импульсом на синхронизирующем входе С изменяется на противоположное. Триггер становится делителем частоты на 2.
C |
t |
|
J
t
K
t
Q |
t |
|
Q
t
Рис. 10.63. Временная диаграмма JK-триггера при R=S=0
На рис. 10.63 приведена временная диаграмма JK-триггера, иллюстрирующая переключение триггера по спаду синхронизирующего сигнала в зависимости от состояния входов J и K.
10.19.4. Регистры
Регистрами называются устройства для приема, хранения, передачи и преобразования информации, представленной обычно в двоичной системе счисления. На рис. 10.64 приведена схема трехразрядного регистра сдвига на JK-триггерах. Предварительно подачей сигналов на установочные входы R и S все триггеры установлены в нулевое состояние (Q1=Q2=Q3=0).
283

|
|
Выход |
|
|
S TT1 |
S |
TT2 Q |
S TT3 Q3 |
|
|
Q1 |
2 |
|
|
J |
J |
|
J |
|
+ K |
K |
|
K |
|
C |
C |
Q2 |
C |
Q3 |
Q1 |
R |
|||
R |
R |
|
|
|
Рис. 10.64. Регистр сдвига на JK-триггерах
C
Q1 t
t
Q2
t
Q3
Рис. 10.65. Временная диаграмма регистра сдвига t
Установим триггер ТТ1 в состояние Q1=1. При этом состояние регистра определится совокупностью значений Q1Q2Q3=100. Под действием первого импульса синхронизации С состояние триггера изменится на Q1Q2Q3=010 (рис. 10.65), под действием второго импульса синхронизации – на Q1Q2Q3=001 и т.д. Таким образом, под действием каждого импульса синхронизации происходит сдвиг двоичного числа на один разряд.
284

 C
C

|
|
|
|
|
|
|
|
|
|
4 |
Окончание табл. 10.6 |
|||||||
1 |
2 |
|
|
|
3 |
|
|
|
|
|
5 |
|
||||||
|
Отрицание |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X1 |
X2 |
Y |
|
|
|
X1 |
& |
Y |
|
|
|
|
|
|
0 |
0 |
1 |
||||
|
логического |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
И-НЕ |
|
|
X2 |
|
|
|
|
|
|
|
|
0 |
1 |
1 |
||||
умножения, |
|
|
|
|
|
|
|
Y = X1 X 2 |
||||||||||
|
штрих |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Шеффера |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Исклю- |
Сложение по |
|
|
X1 |
|
|
|
|
|
|
|
|
|
|
|
X1 |
X2 |
Y |
|
|
=1 |
Y |
|
|
|
|
|
|
0 |
0 |
0 |
||||||
чающее |
модулю 2, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
X2 |
|
|
Y = X1 |
X 2 |
0 |
1 |
1 |
|||||||||
ИЛИ |
неравнознач- |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
1 |
0 |
1 |
||||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
ность |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Исклю- |
Эквивалент- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X1 |
X2 |
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
X1 |
|
=1 |
|
|
|
|
|
|
|
|
|
0 |
0 |
1 |
||
чающее |
ность, |
|
|
|
Y |
Y = X1 |
Х2 |
|||||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
X2 |
|
|
0 |
1 |
0 |
|||||||||||
ИЛИ-НЕ |
равнозначность |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
0 |
||||||
|
|
|
|
|
|
|
|
|
|
X |
Х |
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
1 |
Логические элементы выполняют, как правило, в виде интегральных микросхем, каждый корпус которых может содержать несколько логических элементов. Логические элементы могут работать в режимах положительной и отрицательной логики. В режиме положительной логики логической единице соответствует высокий уровень напряжения, а логическому нулю – низкий уровень напряжения. В режиме отрицательной логики логической единице соответствует низкий уровень напряжения, а логическому нулю – высокий. Временные диаграммы логических элементов приведены в табл. 10.7.
Для контактно-релейных схем в режиме положительной логики логической единице соответствует замкнутый контакт ключа или реле, а логическому нулю – разомкнутый. Светящийся индикатор (лампочка, светодиод) соответствует логической единице, а несветящийся
– логическому нулю.
Как правило, паспортное обозначение логического элемента соответствует функции, реализуемой положительной логикой. Логическая функция может быть задана таблицей, которая называется таблицей истинности. Число строк в таблице – это число возможных наборов значений аргументов. Оно равно 2n, где n – число переменных.
287

Таблица 10.7
Временные диаграммы логических элементов
Логический элемент |
Временная диаграмма |
1 |
2 |
X |
t |
НЕ |
Y |
t |
|
X1 |
t |
X2 |
t |
ИЛИ |
|
Y |
t |
X1 |
t |
И |
X2 |
t |
|
|
|
|
Y |
t |
X1 |
t |
ИЛИ-НЕ |
X2 |
t |
|
Y |
t |
X1 |
t |
X2 |
t |
И-НЕ |
|
Y |
t |
288

|
|
Окончание табл. 10.7 |
1 |
|
2 |
|
X1 |
t |
Исключающее |
X2 |
t |
ИЛИ |
|
|
|
Y |
t |
X1 |
t |
Исключающее |
X2 |
t |
ИЛИ-НЕ |
Y |
t |
Логические элементы представляют собой комбинационные схемы. В комбинационных схемах состояние на выходе в данный момент времени однозначно определяется состояниями на входах в тот же момент времени.
На базе логических элементов построены такие устройства, как шифраторы, дешифраторы, мультиплексоры, демультиплексоры, сумматоры.
Шифратор (кодер) преобразует сигнал на одном из его входов в n-разрядное двоичное число. При появлении сигнала логической единицы на одном из десяти входов на четырех выходах шифратора будет присутствовать соответствующее двоичное число.
Дешифратор (декодер) преобразует код, поступающий на его n- входов, в сигнал логической единицы только на одном из его выходов. Дешифратор n-разрядного двоичного числа имеет 2n выходов.
Различные типы дешифраторов применяются в схемах цифровой индикации информации. Особенно широко применяются дешифраторы, преобразующие информацию в код для семисегментных индикаторов.
Условные обозначения и таблицы истинности шифратора и дешифратора приведены соответственно в табл. 10.8 и 10.9.
289
Таблица 10.8
Условное обозначение и таблица истинности шифратора
|
Условное обозначение |
«1» на |
|
Выходы |
|
||||||||||||
|
|
|
|
|
|
|
|
шифратора |
входе |
1 |
2 |
4 |
8 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
0 |
|
|
|
|
|
|
|
|
0 |
CD |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
0 |
0 |
0 |
1 |
||||||||||||
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
1 |
|
|
2 |
0 |
0 |
1 |
0 |
||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
3 |
|
2 |
|
|
3 |
0 |
0 |
1 |
1 |
||||
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
0 |
1 |
0 |
0 |
|||||
|
|
|
|
4 |
|
|
|||||||||||
|
|
|
5 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
5 |
0 |
1 |
0 |
1 |
||||||||||
|
|
|
|
|
|
|
|
6 |
|
8 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
6 |
0 |
1 |
1 |
0 |
||||||||||
|
|
|
|
|
|
|
|
7 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
8 |
|
|
|
|
7 |
0 |
1 |
1 |
1 |
||||||
|
|
|
|
|
|||||||||||||
|
|
9 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
8 |
1 |
0 |
0 |
0 |
|||||||||
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
1 |
0 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.9
Условное обозначение и таблица истинности дешифратора
Условное обозначение |
|
Входы |
|
«1» на |
|||||||||||
|
|
|
|
дешифратора |
1 |
2 |
4 |
8 |
выходе |
||||||
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
1 |
1 |
|
|
|
|
|
|
DC |
0 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0 |
0 |
1 |
0 |
2 |
|||||||||||
|
|
|
|
|
|
1 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
1 |
|
2 |
|
|
|
|
0 |
|
|
|
|
0 |
1 |
1 |
3 |
||||||||||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
0 |
1 |
0 |
0 |
4 |
|||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
4 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
0 |
1 |
0 |
1 |
5 |
|||||
|
|
4 |
|
5 |
|
|
|
||||||||
|
|||||||||||||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
8 |
|
6 |
|
|
|
0 |
1 |
1 |
0 |
6 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|||||||||||
|
|
7 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
0 |
1 |
1 |
1 |
7 |
||
|
|
|
|
|
|
8 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
1 |
0 |
0 |
0 |
8 |
|||||
|
|
|
|
|
|
9 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
1 |
0 |
1 |
9 |
||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Мультиплексор – это устройство, обеспечивающее соединение одного из информационных входов с выходом. Номер информационного входа, который соединяется с выходом, задается в двоичном коде на адресных входах. Если мультиплексор имеет n адресных входов, то в нем может быть 2n информационных входов.
290

Мультиплексор позволяет передавать по одной коммуникационной линии или каналу одновременно несколько различных потоков данных.
Таблица 10.10
Условное обозначение и таблица истинности мультиплексора
Условное обозначение |
Адрес |
На выход Q |
||||||||
|
мультиплексора |
|
|
передается |
||||||
|
|
|
|
|
|
|
|
А0 |
А1 |
информация |
|
|
D0 |
MX |
|
|
|
|
|||
|
|
|
|
|
|
|
|
со входа |
||
|
|
D1 |
|
|
|
|
|
0 |
0 |
D0 |
|
|
D2 |
|
Q |
|
|
|
|
|
D1 |
|
|
|
|
0 |
1 |
|||||
|
|
D3 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
D2 |
|
|
A0 |
|
|
|
|
|
1 |
0 |
|
|
|
A1 |
|
|
|
|
|
|
|
D3 |
|
|
|
|
|
1 |
1 |
||||
|
|
|
|
|
|
|
|
|
|
|
Демультиплексор – это устройство, обеспечивающее соединение одного из информационных выходов с одним входом. Номер информационного выхода, который соединяется с входом, задается в двоичном коде на адресных входах. Если демультиплексор имеет n адресных входов, то в нем может быть 2n информационных выходов.
Таблица 10.11
Условное обозначение и таблица истинности демультиплексора
|
Условное обозначение |
Адрес |
Информация |
|||||||
|
демультиплексора |
|
|
со входа D |
||||||
|
|
|
|
|
|
|
|
А0 |
А1 |
передается |
|
|
|
|
DMX |
Q |
0 |
|
|
|
на выход |
|
|
|
D |
|
Q |
1 |
|
0 |
0 |
Q0 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Q |
2 |
|
0 |
1 |
Q1 |
|
|
|
A0 |
|
Q |
|
|
|
|
Q2 |
|
3 |
|
1 |
0 |
||||||
|
|
|
A1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
Q3 |
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
291

Условные обозначения и таблицы истинности мультиплексора и демультиплексора приведены соответственно в табл. 10.10 и 10.11.
Разновидностью логического элемента «Исключающее ИЛИ» является сумматор. Основной элементарной операцией, выполняемой над кодами чисел в цифровых устройствах, является арифметическое сложение.
При арифметическом сложении выполняются и другие дополнительные операции: учёт знаков чисел, выравнивание порядков слагаемых и тому подобное. Указанные операции выполняются в ариф- метико-логических устройствах, ядром которых являются сумматоры. Сумматор – логический операционный узел, выполняющий арифметическое сложение двух чисел.
Одноразрядный двоичный сумматор (С) – это устройство с тремя входами и двумя выходами, работа которого может быть описана таблицей истинности. Схемное обозначение сумматора и его таблица истинности приведены в табл. 10.12.
Многоразрядный сумматор для поразрядного сложения обычно состоит из соответствующим образом соединенных одноразрядных сумматоров.
Таблица 10.12
Схемное обозначение сумматора и его таблица истинности
|
Схемное |
|
Входы |
|
Выходы |
||||||
|
Разряд |
Разряд |
Перенос |
|
Перенос в |
||||||
|
обозначение |
из преды- |
|
||||||||
|
первого |
второго |
|
следую- |
|||||||
|
сумматора |
дущего |
Сумма S |
||||||||
|
|
|
|
|
|
|
слагае- |
слагае- |
разряда |
|
щий раз- |
|
|
|
|
|
|
|
мого A |
мого B |
|
ряд ПВЫХ |
|
|
|
|
|
|
|
|
ПВХ |
|
|||
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
1 |
1 |
0 |
|
|
|
ПС |
|
|
|
0 |
1 |
0 |
1 |
0 |
|
А |
|
С |
|
|
|
|||||
|
В |
|
|
|
|
|
0 |
1 |
1 |
0 |
1 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
ПВЫХ |
|
|
1 |
0 |
0 |
1 |
0 |
||||
|
ПВХ |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
1 |
0 |
1 |
0 |
1 |
|||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
1 |
1 |
0 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
1 |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
292 |
|
|
|
Упрощенная блок-схема МП (рис. 10.67, б) состоит из АЛУ и совокупности n параллельных регистров общего назначения (РОН) по m разрядов каждый для хранения двоичных чисел, используемых в процессе вычислений.
Всостав МП входят также два параллельных буферных регистра (БР), предназначенных для кратковременного хранения чисел А и В во время выполнения операции АЛУ, и устройство управления (УУ), которое задает режим работы всех элементов МП.
При работе МП числа А и В, над которыми выполняются операция, передаются по магистрали последовательно из РОН на буферные регистры БРА и БРВ. Затем АЛУ по команде производит указанную операцию, а результат ее по внутренней магистрали передается в РОН. Обычно для этой цели выделяется специальный регистр РОН, называемый аккумулятором, в котором ранее записанное число стирается. Например, сложение трех чисел выполняется таким образом: сначала складываются два первых числа и результат записывается в РОН. Затем в АЛУ поступают результат этого сложения и третье число, вычисляется окончательный результат и записывается в РОН.
Последовательность выполнения операций практически не ограничивает функциональные возможности МП. Однако эффективность применения МП значительно возрастает, если его снабдить дополнительными устройствами для хранения информации и обмена ею с внешними устройствами.
МикроЭВМ – это устройства на основе МП, а также запоминающих устройств (ЗУ), УУ и средств связи с периферийными устройствами (интерфейс). Управляющая микроЭВМ должна иметь средства сопряжения с объектом управления: датчики, АЦП, ЦАП. Совокупность микроЭВМ и средств сопряжения образует микропроцессорную систему.
Блок-схема микроЭВМ (рис. 10.68) содержит устройства ввода (УВВ) и вывода (УВЫВ), порты ввода и вывода, центральный МП с АЛУ, устройством управления и регистрами общего назначения, а также постоянные запоминающие устройства (ПЗУ) и оперативные запоминающие устройства (ОЗУ).
Вкачестве УВВ служат клавиатура, АЦП, различные носители информации (флэш-карты, диски и т.п.), в качестве УВЫВ – дисплеи, печатающие устройства, ЦАП и т.п. Порты ввода и вывода предназначены для кратковременного хранения информации в процессе ввода, вывода.
294

что обеспечивает последовательность выполнения команд программы;
2)при каждом положении счетчика команд происходит считывание из памяти следующей информации: кода операции, которая выполняется по данной команде, и числа (или его адреса), над которым команда выполняется;
3)выполнение команды.
Затем цикл повторяется для следующей команды.
УУ при помощи генератора тактовых сигналов (ГТС) обеспечивает требуемую последовательность работы элементов для выполнения команды. Выполнение одной команды происходит за несколько машинных циклов, каждый из которых содержит несколько периодов работы ГТС. Команды в МП представляются в виде многоразрядных двоичных слов (чисел).
Контрольные вопросы
1.Частота пульсаций выпрямленного напряжения в схеме двухполупериодного выпрямителя составляет 2 кГц. Какова частота питающего напряжения:
1) 1 кГц; 2) 2 кГц; 3) 4 кГц; 4) 8 кГц?
2.Какой материал называется полупроводником n-типа:
1)тот, в котором основные носители зарядов – электроны;
2)тот, в котором основные носители зарядов – дырки;
3)тот, в котором присутствуют электронно-дырочные пары?
3.Какой материал называется полупроводником р-типа: 1) тот, в котором основные носители зарядов – электроны;
2) тот, в котором присутствуют электронно-дырочные пары; 3) тот, в котором основные носители зарядов – дырки?
4.Что называется p-n переходом:
1)контакт двух одинаковых полупроводников с дырочной проводимостью;
2)контакт двух полупроводников с разными типами проводимо-
стей;
3)контакт двух одинаковых полупроводников с электронной проводимостью?
296

5.Назовите наиболее важное свойство p-n перехода, которое позволило широко использовать полупроводники:
1) его электрическое сопротивление минимально;
2) его электрическое сопротивление максимально; 3) его электрическое сопротивление не зависит от параметров це-
пи;
4) его электрическое сопротивление зависит от полярности напряжения, приложенного к электродам в области p-n перехода.
6.Что представляет собой прямой ток в p-n переходе:
1)ток, обусловленный движением только электронов;
2)ток, обусловленный движением основных носителей зарядов;
3)ток, обусловленный движением неосновных носителей заря-
дов?
7. Что представляет собой обратный ток в p-n переходе: 1) ток, обусловленный движением дырок;
2) ток, обусловленный движением основных носителей зарядов;
3) ток, обусловленный движением неосновных носителей зарядов?
8. Что представляет собой полупроводниковый диод:
1)полупроводник с одним p-n переходом, который хорошо проводит ток только в одном направлении;
2)полупроводник с одним p-n переходом, который хорошо проводит ток во всех направлениях;
3)полупроводник с одним p-n переходом, который ограничивает электрический ток?
9. Какой выпрямитель изображен на схеме: |
|
U |
||
1) двухполупериодный мостовой не- |
|
|
|
|
управляемый; |
|
|
|
|
2) однофазный управляемый выпря- |
|
|
|
|
митель с нулевым выводом трансформа- |
|
|
|
|
тора; |
|
|
|
|
|
|
|
||
3) двухполупериодный неуправляе- |
|
|
|
|
мый выпрямитель с нулевым выводом |
|
|
|
|
трансформатора? |
|
ФИУ |
||
297 |
|
|
|
|
|
|
|
|
|

10. Какой выпрямитель изображен на схеме: |
|
|
|||||
|
|
1) |
однополупериодный; |
|
|||
Д1 |
Д2 |
2) |
двухполупериодный с вы- |
||||
RН |
водом |
средней |
точки |
вто- |
|||
U |
ричной |
обмотки |
трансфор- |
||||
|
|||||||
Д3 |
Д4 |
матора; |
|
|
|
||
3) |
двухполупериодный |
мос- |
|||||
|
|
товой; |
|
|
|
||
|
|
4) |
трехфазный мостовой? |
||||
11. Как условно на электрической схеме обозначается диод?
|
1) |
2) |
3) |
4) |
12. Что такое электрический пробой p-n перехода: |
|
|||
1) |
механическое разрушение p-n перехода; |
|
||
2) |
необратимое разрушение p-n перехода при его перегреве; |
|
||
3) |
резкое (лавинное) увеличение обратного тока при неизменном |
|||
обратном напряжении; |
|
|
|
|
4) |
резкое (лавинное) увеличение прямого тока при неизменном |
|||
прямом напряжении? |
|
|
|
|
13. Какой выпрямитель изображен на схеме:
|
|
1) |
двухполупериодный с |
|
|
выводом средней точки вто- |
|
Д1 |
Д2 |
ричной обмотки трансфор- |
|
матора; |
|||
Д3 |
Д4 |
2) |
двухполупериодный мос- |
Д5 |
Д6 |
товой; |
|
3) трехфазный мостовой? |
|||
RН
298

14. Как условно на электрической схеме обозначается управляемый тиристор?
1) 2) 3) 4)
15. Что представляет собой полупроводниковый тиристор:
1) полупроводниковый прибор с двумя p-n переходами, позволяющий усиливать электрический сигнал;
2) полупроводниковый прибор с одним p-n переходом, который хорошо проводит ток в прямом направлении;
3) полупроводниковый прибор с тремя p-n переходами, используемый для электронного переключения?
16. Какова форма тока, протекающего через каждый диод?
1) |
i |
|
U |
|
|
2) |
i |
t |
|
||
Rн |
|
|
3) |
i |
t |
|
 t
t
17. Существует ли связь между входными и выходными характеристиками транзисторов и вольт-амперной характеристикой диода:
1)не существует;
2)существует. Входная характеристика транзистора подобна прямой ветви вольт-амперной характеристики диода;
3)существует. Выходная характеристика транзистора подобна прямой ветви вольт-амперной характеристики диода?
299
18. Какова форма тока, протекающего через сопротивление нагрузки?
U |
1) |
i |
|
|
2) i t
Rн
3) i  t
t
 t
t
19.В чем отличие управляемых выпрямителей от неуправляе-
мых:
1)управляемые выпрямители совмещают выпрямление переменного напряжения с управлением его величиной;
2)управляемые выпрямители совмещают выпрямление переменного напряжения с усилением;
3)управляемые выпрямители совмещают выпрямление переменного напряжения с отключением цепи при резком его увеличении?
20.Запирается ли тиристор после снятия управляющего импуль-
са:
1)да;
2)нет, если сохраняется полярность напряжения, приложенного между анодом и катодом;
3)это зависит от длительности управляющего импульса?
21.Как повлияет увеличение частоты f питающего напряжения выпрямителя на работу емкостного сглаживающего фильтра:
1)сглаживание улучшится;
2)сглаживание ухудшится;
3)сглаживание не изменится?
300

22. Каким отрезком на графике вольт-амперной характеристики тиристора определяется величина напряжения прямого пробоя:
I
 г
г
1)бв;
2)гв;
3) аг;
4) аб?
в
 б U
б U
а 
23. В каких соотношениях находятся величины токов цепи управления на приведенных графиках вольт-амперных характеристик управляемого тиристора:
I
1)Iу1>Iу2>Iу3;
2)Iу1=Iу2=Iу3;
3)Iу1<Iу2<Iу3?
Iу3 Iу2 Iу1
U
24.В чем преимущество симисторного регулятора переменного тока перед реостатным:
1)практическое отсутствие потерь мощности;
2)простота схемы управления регулятором?
25.Может ли симисторный регулятор регулировать мощность, если на его вход подать постоянное напряжение:
1)может, но при этом возрастут потери мощности на симисторе;
2)не может, так как с поступлением первого управляющего импульса симистор откроется и будет оставаться открытым до тех пор, пока не будет снято питающее напряжение?
301


30. По какой схеме включен транзистор:
1) с ОБ;
2) с ОК;
3)с ОЭ?
31.Что называется базой биполярного транзистора:
1)наружный слой, являющийся носителем зарядов, который создает ток;
2)наружный слой, принимающий заряды;
3)средний слой?
32.Что называется эмиттером биполярного транзистора:
1)наружный слой, являющийся носителем зарядов, который создает ток;
2)наружный слой, принимающий заряды;
3)средний слой?
33. Что называется коллектором биполярного транзистора:
1) наружный слой, являющийся носителем зарядов, который создает ток;
2) наружный слой, принимающий заряды;
3) средний слой?
34. Какое соотношение между токами базы на приведенных графиках коллекторных статических характеристик транзистора:
1) Iб1>Iб2>Iб3>Iб4; |
Iк |
Iб |
|
||
|
Iб |
|
2) Iб1=Iб2=Iб3=Iб4; |
|
|
|
Iб |
|
3) Iб1<Iб2<Iб3<Iб4? |
|
|
|
Iб |
|
|
|
Uкэ |
35. Чем характеризуется состояние отсечки при работе транзистора в ключевом режиме:
1)малым током коллектора;
2)малым сопротивлением коллекторного перехода?
303

36. Как на электрической схеме условно изображается биполярный транзистор?
|
2 |
3 |
4 |
1 |
|||
|
|
|
|
1)1 – транзистор типа n-p-n, 3 – транзистор типа p-n-р;
2)1 – транзистор типа p-n-р, 2 – транзистор типа n-p-n;
3)3 – транзистор типа n-p-n, 1 – транзистор типа p-n-р;
4)4 – транзистор типа n-p-n, 2 – транзистор типа p-n-р.
37. Какое напряжение должно быть в цепи «коллектор–эмиттер» (Uкэ) и в цепи «база–эмиттер» (Uбэ) при работе транзистора в усилительной схеме:
1)Uкэ – прямое, Uбэ – обратное;
2)Uкэ – обратное, Uбэ – прямое;
3)не имеет значения?
38.Микропроцессорная система в качестве обязательного элемента содержит:
1) арифметико-логическое устройство;
2) триггер;
3) операционный усилитель;
4) микроЭВМ.
39.Для чего в цепи «коллектор–эмиттер» транзисторного усилительного каскада служит сопротивление Rк:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+Екэ |
1) для получения нагру- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Rб |
|
|
Rк |
|
|
|
С |
зочного режима; |
||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
2) для увеличения выход- |
|||||||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ного сопротивления уси- |
|
С |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
лительного каскада; |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3) для увеличения сопро- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uвх |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
тивления в цепи «коллек- |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тор–эмиттер»? |
304
40.На рисунке приведено условно-графическое обозначение:
1)делителя напряжения;
2) мостовой выпрямительной схемы;
3)операционного усилителя;
4)однополупериодного выпрямителя.
41.Чем характеризуется состояние насыщения при работе транзистора в ключевом режиме:
1) малым током коллектора;
2) малым сопротивлением коллекторного перехода?
42.В момент времени t1 на выходе Q RS-триггера будет:
1)четыре в двоичном коде;
2)логический ноль;
3)неопределенное значение;
4)логическая единица.
43. Приведенные временные диаграммы напряжения на входе и на выходе соответствуют:
uвых
u uвх
1) усилительному каскаду с общей базой;
2) неинвертирующему усилителю на операционном усилителе;
3) повторителю напряжения на операционном усилителе;
4) усилительному каскаду с общим эмиттером.
305

44.На рисунке изображено условное обозначение элемента, выполняющего логическую операцию:
1)стрелка Пирса (ИЛИ-НЕ);
2)инверсии (НЕ);
3)логического умножения (И);
4)логического сложения (ИЛИ).
45.Цифровым счетчиком импульсов называют устройство, предназначенное:
1)для счета числа входных импульсов;
2)записи и хранения кодов;
3)преобразования аналоговой информации в цифровую;
4)распознавания кодовых комбинаций.
46.Полупроводниковый стабилитрон – полупроводниковый диод, напряжение на котором в области электрического пробоя слабо зависит от тока и который служит:
1)для индикации наличия электромагнитных полей;
2)генерации переменного напряжения;
3)стабилизации напряжения;
4)усиления напряжения.
47.Для стабилизации напряжения используется элемент с вольтамперной характеристикой, соответствующей рисунку номер:
I I I I
U  U
U  U U
U U
|
|
|
|
|
|
|
1 |
2 |
3 |
|
|
4 |
|
|
|
|||||
|
|
|
|
|
|
|
48. В современных усилителях не могут быть использованы:
1)диодные тиристоры;
2)полевые транзисторы;
3)биполярные транзисторы;
4)интегральные микросхемы.
306

49.Триггером называется устройство, обладающее двумя состояниями устойчивого равновесия и способное скачком переходить из одного состояния в другое под действием:
1) механического перемещения;
2) заложенной в триггер программы;
3) внешнего управляющего сигнала;
4) определенного временного интервала.
50.На рисунке приведена схема:
R2
R1
1)делителя напряжения;
2)повторителя напряжения;
3)инвертирующего усилителя;
4)неинвертирующего усилителя.
51. Для стабилизации тока используется устройство с вольтамперной характеристикой, соответствующей рисунку номер:
52. Частота пульсаций выпрямленного напряжения на выходе однофазного мостового выпрямителя составляет 12 кГц. Какова частота питающего напряжения на входе выпрямителя:
1) 3 кГц; 2) 4 кГц; 3) 6 кГц; 4) 12 кГц?
307
11.ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ И ПРИБОРЫ
11.1.Средства измерения
Всоответствии с методами измерений электроизмерительные приборы делятся:
– на приборы непосредственной оценки (амперметры, вольтметры и т.д.);
– приборы сравнения (измерительные мосты, потенциометры). Приборы непосредственной оценки могут быть классифицирова-
ны по ряду признаков: принципу действия, назначению, точности, условиям эксплуатации, защищенности от внешних магнитных или электрических полей, устойчивости к механическим воздействиям и др. Классификация электроизмерительных приборов регламентирова-
на ГОСТ 22261-76.
По принципу действия (ГОСТ 22261-76) предусматривается деление электромеханических приборов непосредственной оценки на следующие системы:
● магнитоэлектрическую; ● электромагнитную; ● электродинамическую; ● ферродинамическую; ● индукционную; ● вибрационную;
● электростатическую.
Приборы магнитоэлектрической системы в сочетании с преобразователями образуют новые типы приборов: выпрямительные, термоэлектрические, электронные. Отдельную группу составляют цифровые приборы.
По назначению электроизмерительные приборы в зависимости от рода измеряемой величины подразделяются на амперметры, вольтметры, ваттметры, счетчики, фазометры, частотометры и др.
На шкале прибора с использованием условных обозначений указываются:
– заводской номер;
– единица измеряемой величины;
– класс точности;
– ГОСТ;
– число фаз и род тока;
308

–система прибора;
–рабочее положение шкалы.
Условные обозначения некоторых характеристик электроизмерительных приборов приведены в табл. 11.1.
Таблица 11.1
Условные обозначения некоторых характеристик электроизмерительных приборов
Основные параметры приборов |
|
|
|
|
|
|
|
|
|
|
Условные обозначения |
|||
Единицы измеряемой величины |
|
|
|
А – ампер; V – вольт; W – ватт |
||||||||||
Класс точности прибора |
0,05; 0,1; 0,2; 1,0; 1,5; 2,5; 4,0 |
|||||||||||||
Род тока |
|
|
|
|
|
|
|
|
– |
постоянный; |
||||
|
|
|
|
― |
|
|
||||||||
|
|
|
~ |
|
|
– переменный; |
||||||||
|
|
|
~ |
|
|
– постоянный и переменный |
||||||||
Системы прибора: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
магнитоэлектрическая |
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
электромагнитная |
|
|
|
|
|
|
|
|
|
|
|
|
|
Э |
|
|
|
|
|
|
|
|
|
|
|||||
электродинамическая |
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||
ферродинамическая |
|
|
|
|
|
|
|
|
|
|
|
|
|
ЭД |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рабочее положение шкалы прибо- |
|
|
|
|
|
|
|
|
|
|
|
|
|
– горизонтальное; |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ра |
|
|
|
|
|
|
|
|
|
|
|
|
|
– вертикальное; |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
60º – наклонное |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Номинальная частота |
|
|
|
50 Hz |
||||||||||
Номинальная область частот |
|
|
|
45 – 550 Hz |
||||||||||
Номинальное значение (подчерк- |
|
|
|
20 – 50 – 100 Hz |
||||||||||
нуто) и расширенная область частот |
|
|
|
|||||||||||
Группа приборов по условиям экс- |
|
|
|
Б – в закрытых сухих помещениях; |
||||||||||
плуатации |
|
|
|
В1, В2 – для полевых и морских усло- |
||||||||||
|
вий; |
|
|
|
|
|
|
|
||||||
|
|
|
|
Т – для условий тропического клима- |
||||||||||
|
та |
|
|
|
|
|
|
|
||||||
Тип прибора |
|
|
|
Э 330 – электромагнитный; |
||||||||||
|
|
|
|
М 261 – магнитоэлектрический; |
||||||||||
|
|
|
|
Д 202 – электродинамический |
||||||||||
11.2. Выбор электроизмерительных приборов
Для правильного измерения приборов необходимо:
– правильно выбрать тип прибора, класс точности, предел (пределы) измерения;
309
– определить цену деления шкалы прибора, схему его включения в электрическую цепь.
При выборе типа прибора необходимо пользоваться сведениями об измерительныхприборах, приводимымивсправочниках.
Предел измерения прибора должен быть близок к измеряемому значению. Этообеспечиваетбольшуюточностьизмерения.
Класс точности прибора определяется необходимой точностью измерений.
Перед проведением измерения необходимо определить цену деления шкалы электроизмерительного прибора. Отсчетное устройство прибора состоит из шкалы и указателя. В зависимости от назначения, принципа действия и конструкции прибора применяют разные шкалы и указатели. Шкалы могут быть именованными, т.е. градуированными в единицах измеряемых величин, или условными. Условные шкалы применяются в многопредельных приборах, обычно условная шкала имеет 100 или150 делений.
Цена деления – это отношение верхнего предела измерения прибора к общемучислуделенийNа егошкалы, т.е.
Са = |
аN |
. |
(11.1) |
|
|||
|
Nа |
|
|
Цена деления амперметра, вольтметра и ваттметра вычисляется соответственно по формулам
С |
I |
= |
I N |
; |
С |
= |
U N |
; С |
Р |
= |
РN |
, |
(11.2) |
|
|
|
|||||||||||
|
|
N I |
|
U |
|
NU |
|
N Р |
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
где IN, UN, PN – пределы измерения соответственно амперметра, вольтметра и ваттметра; NI, NU, NP – число делений шкалы соответственно амперметра, вольтметраиваттметра.
Для многопредельных приборов цена деления определяется как отношение выбранного предела измерения к числу делений шкалы. Например, вольтметр имеет пределы измерений 50, 150 и 300 В и шкалу 100 де-
лений. Цена деления на пределе измерения 50 В СU = 10050 = 0,5 делВ . ; на пределе 150 В СU = 150100 =1,5 делВ . ; на пределе 300 В СU = 100300 = 3 делВ . .
Численное значение измеряемой величины
а=Nха Cа , (11.3)
где Nxа – число делений, отсчитанных по шкале; Cа – цена деления прибора.
310

Численные значения тока, напряжения и активной мощности определяются по формулам
I=NxI CI; U=NxU CU; Р=NxР CР, (11.4)
где NxI, NxU, NxР – число делений, отсчитанных по шкале соответственно амперметра, вольтметра и ваттметра; CI, CU, CР – цена деления соответственноамперметра, вольтметраиваттметра.
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
45 – 100 – 300 Hz |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
Б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
ЗИП |
|
Э 330 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
1,5 ГОСТ8711-60 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
1961 г. 0011 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 11.1. Шкалаамперметра
Шкалы приборов (рис. 11.1) бывают нулевые и безнулевые. Нулевые шкалы могут быть односторонними (нуль размещен в начале шкалы) и двухсторонними (нуль размещен между начальной и конечной отметками). Последние в свою очередь делятся на симметричные и несимметричные (от положения нуля на шкале). На безнулевых шкалах конечные отметки соответствуют нижнему и верхнему пределам измерения. Способ включения прибора в измерительную схему зависит от назначения прибора, параметров прибора и цепи, где производятся измерения.
11.3. Включение в цепь амперметра
Амперметр включается в цепь последовательно с нагрузкой (рис. 11.2). Согласно закону Ома без учета сопротивления амперметра ток
311

I = |
U . |
|
(11.5) |
|
Rн |
|
|
А |
|
|
|
|
I |
Rн |
|
|
|
|
|
U |
|
|
|
Рис. 11.2. Схема включения амперметра |
|
||
С учетом внутреннего сопротивления амперметра ток в цепи
I ′ = |
|
|
U |
|
, |
(11.6) |
R |
н |
+ R |
|
|||
|
|
|
0 А |
|
||
где R0А – внутреннее сопротивление амперметра. Погрешность измерения
∆I = I1 − I2 |
=U |
R0 А |
. |
(11.7) |
Rн (Rн + R0 А ) |
|
|||
|
|
|
|
Из выражения (11.7) следует:
–включение амперметра влияет на ток в измеряемой цепи, что приводит к дополнительной погрешности измерения;
–вносимая амперметром погрешность тем меньше, чем меньше внутреннее сопротивление амперметра;
–при известных сопротивлениях Rн и R0А эта погрешность может быть учтена.
Амперметры сконструированы таким образом, что их внутреннее сопротивление очень мало. Поэтому в большинстве случаев при измерениях влиянием внутреннего сопротивления амперметров можно пренебречь.
11.4. Включение в цепь вольтметра
Вольтметр включается параллельно участку, на котором измеряется напряжение (рис. 11.3).
Без вольтметра напряжение на измеряемом участке цепи
U1 |
= |
|
R1 |
U . |
(11.8) |
|
R1 |
+ R2 |
|||||
|
|
|
|
|||
|
|
312 |
|
|
||

Включение вольтметра изменяет измеряемое напряжение, которое оказывается равным
U1′ = |
|
R1R0V |
U , |
(11.9) |
|
R1R2 |
+ R0V R1 + R2 R0V |
||||
|
|
|
где R0V – внутреннее сопротивление вольтметра.
|
R2 |
|
|
U |
V |
U1 |
R1 |
|
|
||
Рис. 11.3. Схема включения вольтметра |
|
||
Погрешность измерения при этом
|
|
|
|
|
|
R2 R |
2 |
|
|
|
|
|
|
|||
|
′ |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||
∆U =U – U |
= R R |
( R |
+ R |
2 |
) |
+ R |
(R |
+ R |
2 |
)2 U . |
(11.10) |
|||||
|
||||||||||||||||
|
|
1 2 |
1 |
|
|
|
0V |
1 |
|
|
|
|
||||
Из выражения (11.10) следует, что:
–включение вольтметра влияет на величину измеряемого напряжения, вызывая дополнительную погрешность;
–вносимая вольтметром погрешность тем меньше, чем больше внутреннее сопротивление вольтметра;
–при известном сопротивлении цепи и прибора эта погрешность может быть учтена.
Вольтметры сконструированы таким образом, что их внутреннее сопротивление очень велико. Поэтому при измерении напряжения в низкоомных цепях влиянием внутреннего сопротивления вольтметра можно пренебречь.
11.5. Включение в цепь ваттметра или счетчика энергии
Эти приборы имеют две обмотки: токовую и потенциальную. При измерениях активной мощности электродинамическим ваттметром необходимо следить за правильным включением прибора в схему (рис. 11.4). Токовая обмотка прибора включается последовательно (так же, как амперметр), а потенциальная обмотка – параллельно участку, мощность которого необходимо измерить (так же, как вольтметр).
313

** W
U |
|
|
Rн |
|
|
||
|
|
|
|
|
|
|
|
Рис. 11.4. Схема включения ваттметра
Зажимы, отмеченные точкой или звездочкой (генераторные), соединяются вместе между собой и с проводом, идущим от источника энергии.
11.6. Погрешности измерений
Результаты измерений дают лишь приближенное значение измеряемой величины. Разность между полученным при измерении и действительным значениями измеряемой величины называется погрешностью результата измерения. Чем меньше погрешность, тем выше точность измерения. В зависимости от причин возникновения, способов учета и методов измерения погрешности могут быть:
–систематические;
–случайные;
–промахи.
Систематическими называются погрешности, постоянные во времени или изменяющиеся по определенному закону, природа и характер которых известны. Примеры систематических погрешностей: погрешности от влияния температуры, частоты, магнитных и электрических полей на показания приборов; погрешности метода измерения. Эти погрешности могут быть учтены или частично скомпенсированы с использованием теории вероятностей и методов статистики.
Случайными называются погрешности, закономерность которых неизвестна. Например, результаты отдельных измерений одной и той же величины отличаются даже в тех случаях, когда повторные измерения проводят одинаково тщательно и при одних и тех же условиях. Случайные погрешности нельзя исключить опытным путем, но их влияние на результат измерения может быть теоретически учтено
314
применением при обработке результатов измерения теории вероятностей и методов статистики.
Промахи – это неправильные отсчеты по шкале прибора, пропуски в наблюдениях и т.д. Результаты измерений, содержащие промахи, должны быть отброшены как недостоверные.
Результаты намерений содержат случайные и систематические погрешности. Основной характеристикой измерительного прибора является статическая погрешность, которая определяет степень приближения показаний прибора к действительному значению измеряемой величины.
11.7. Определение погрешностей при однократных измерениях
Различают три вида статических погрешностей.
Абсолютная погрешность ∆а – это разность между показаниями
прибора а и действительным значением измеряемой |
величины а0, т.е. |
|
∆а = а−а0 . |
|
(11.11) |
Абсолютные погрешности измерения тока, напряжения и актив- |
||
ной мощности соответственно определяются выражениями |
|
|
∆I = I − I0 ; ∆U =U −U0 ; ∆P = P − P0 |
. |
(11.12) |
Абсолютная погрешность не дает правильного представления о точности измерения. Например, абсолютная погрешность ∆I=0,2 А при измеряемом токе I0=2 А характеризует низкую точность, а абсолютная погрешность ∆I=0,2 А при I0=200 А означает более высокую точность измерения. Поэтому для оценки точности измерения пользуются относительной погрешностью.
Относительная погрешность ε представляет собой отношение абсолютной погрешности ∆а к истинному значению измеряемой величины а0. Относительная погрешность обычно выражается в процентах.
εа = |
∆а 100% . |
(11.13) |
|
а0 |
|
Относительные погрешности измерения тока, напряжения и активной мощности соответственно определяются выражениями:
εI |
= |
∆I 100% ; |
εU |
= |
∆U 100% ; |
εP = |
∆P 100% . (11.14) |
|
|
I0 |
|
|
U0 |
|
P0 |
Приведенная погрешность – это выраженное в процентах отношение абсолютной погрешности ∆а к пределу измерения прибора аN.
315
Величина аN определяется суммой левого и правого пределов измерения при двусторонней шкале (с нулем посередине) или разностью верхнего и нижнего пределов измерения при односторонней шкале.
Приведенная погрешность К, выраженная в процентах, называется классом точности измерительного прибора:
Ка = |
∆а |
100% . |
(11.15) |
|
|||
|
аN |
|
|
Классы точности амперметра, вольтметра и ваттметра соответственно определяются выражениями
КI = |
∆I |
100% ; |
KU = |
∆U 100% ; |
K P = |
∆P 100% . (11.16) |
|
||||||
|
I N |
|
U N |
|
PN |
|
По допустимому значению приведенной погрешности все меры и измерительные приборы делятся на следующие классы точности: 0,05; 0,1; 0,2; 1,0; 1,5; 2,5; 4,0. Класс точности указывается на шкале прибора. Например, указанный на вольтметре класс точности 0,2 означает, что его приведенная погрешность не превышает 0,2%.
Чтобы измерение было более точным, следует устанавливать возможно меньший предел измерения, но такой, чтобы стрелка не выходила за правую или левую границу шкалы. Нередко в начале шкалы бывает нерабочий участок. На этом участке точность измерения, заданная классом точности, не гарантируется. На практике при расчете относительной погрешности вместо истинного значения измеряемой величины берут показания прибора. Тогда формулы (11.14) примут вид
εI = |
∆I 100% ; |
εU |
= |
∆U |
100% ; |
|
εP = |
∆P |
100% . |
(11.17) |
|||||||||||||||||||||||
|
U |
|
P |
||||||||||||||||||||||||||||||
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Из выражений (11.16) найдем абсолютные погрешности: |
|
||||||||||||||||||||||||||||||||
∆I = |
± K I I N |
; |
|
∆U = |
± KU U N |
; |
∆P = |
± K P PN |
. |
(11.18) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
100% |
|
|
|
|
100% |
|
|
|
|
100% |
|
|
|
||||||||||||||||||
Произведем подстановку из формул (11.18) в соответствующие |
|||||||||||||||||||||||||||||||||
выражения (11.17): |
|
|
|
I N |
|
|
|
|
|
|
|
U N |
|
|
|
|
|
|
|
|
|
|
|
PN |
|
|
|
||||||
ε |
I |
= ±K |
I |
; |
ε |
= ±K |
|
; |
ε |
|
= ±K |
|
|
|
. |
(11.19) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
I |
U |
|
|
|
|
U U |
|
P |
|
|
|
|
P |
P |
|
|||||||||||||
Из выражений (11.17) определим абсолютные погрешности: |
|||||||||||||||||||||||||||||||||
|
∆I = |
|
εI I |
; |
∆U = |
εUU |
; ∆P = |
|
εP P |
. |
|
|
|
(11.20) |
|||||||||||||||||||
|
100% |
|
100% |
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
100% |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
316
Контрольные вопросы
1. Относительной погрешностью называется:
1)отношение абсолютной погрешности к предельному значению шкалы (нормирующей величине) прибора в процентах;
2)разность между показанием прибора и действительным значением измеряемой величины;
3)отношение абсолютной погрешности к действительному значению измеряемой величины в процентах;
4)отношение измеренного значения величины к предельному значению шкалы прибора.
2. Абсолютной погрешностью называется:
1)отношение абсолютной погрешности к предельному значению шкалы прибора в процентах;
2)разность между показанием прибора и действительным значением измеряемой величины;
3)отношение абсолютной погрешности к действительному значению величины в процентах;
4)отношение измеренного значения величины к предельному значению шкалы прибора.
3.К какому методу измерения относится измерение мощности в цепи постоянного тока методом амперметра и вольтметра:
1) совокупному; 2) относительному; 3) косвенному; 4) прямому?
4.Если измеренное значение тока Iи=1,9 А, действительное значение тока I=1,8 А, то относительная погрешность равна:
1) 0,1 А; 2) 5,6 %; 3) –0,1 А; 4) 10 %.
5.Цена деления шкалы прибора с односторонней шкалой определяется:
1) как отношение разности верхнего и нижнего пределов измерения к числу делений шкалы;
2) отношение разности верхнего и нижнего пределов измерения к классу точности прибора;
3) отношение числа делений шкалы прибора к разности верхнего
инижнего пределов измерения;
4) отношение суммы верхнего и нижнего пределов измерения к числу делений шкалы.
317

6. Цена деления шкалы прибора с двусторонней шкалой определяется:
1)как отношение разности левого и правого пределов измерения
кчислу делений шкалы;
2)отношение разности левого и правого пределов измерения к классу точности прибора;
3)отношение числа делений шкалы прибора к разности левого и правого пределов измерения;
4)отношение суммы левого и правого пределов измерения к числу делений шкалы.
7. Ваттметр измеряет мощность приемника(ов): |
|||
* |
* W |
R1 |
|
|
|
|
|
U |
|
R2 |
R3 |
1) R1; 2) R1 и R2; 3) всех; 4) R2 и R3. |
|
||
8.Из представленных значений величиной мощности являются: 1) 1 А; 2) 100 кВт·ч; 3) 20 МВт; 4) 30 Дж.
9.Класс точности электроизмерительного прибора определяет-
ся:
1)относительной погрешностью, равной γпр % = ∆АА 100 ;
2)погрешностью, равной отношению абсолютной погрешности к
количеству делений шкалы прибора N γпр % = |
∆А |
100 ; |
|
N |
|||
|
|
3) приведенной погрешностью, равной отношению абсолютной погрешности к нормирующей величине прибора АN (в большинстве
случаев это предел шкалы измерений) γпр % = ∆А 100;
АN
4) абсолютной погрешностью, равной разности между измеренным и действительным значениями измеряемой величины
∆А=АИЗМ–А.
318

10. Как включают в электрическую цепь амперметр, вольтметр: 1) амперметр последовательно с нагрузкой, вольтметр парал-
лельно нагрузке; 2) амперметр и вольтметр последовательно с нагрузкой;
3) амперметр и вольтметр параллельно нагрузке?
11. Принцип работы прибора электромагнитной системы осно-
ван:
1)на явлении самоиндукции;
2)взаимодействии проводников с током;
3)взаимодействии проводника с током и магнитного поля;
4)взаимодействии ферромагнитного сердечника с магнитным
полем.
12. Приведенный на рисунке прибор относится к приборам: |
|||||||||
0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 100 |
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
– |
|
0.5 |
1)электромагнитной системы;
2)электродинамической системы;
3)индукционной системы;
4)магнитоэлектрической системы.
13. Шкала ваттметра, включенного на входе цепи переменного тока, имеет 100 делений. Предел измерения по напряжению 150 В, предел измерения по току 5 А. Стрелка прибора указывает на деление
60.Определить активную мощность цепи.
1)150 Вт; 2) 300 Вт; 3) 450 Вт; 4) 600 Вт.
14. Ваттметр, включенный в фазу трехфазной цепи с симметричной нагрузкой, показал 150 Вт. Чему равна активная мощность нагрузки:
1) 150 Вт; 2) 300 Вт; 3) 450 Вт; 4) 600 Вт?
319
12.ВОПРОСЫ ИТОГОВОГО КОНТРОЛЯ
12.1.Цепи постоянного тока
1.Изобразите схему электрической цепи, состоящей из источника питания, потребителя и соединительных проводов между ними. Обозначьте элементы схемы и напишите формулу закона Ома для всей цепи.
2.Напишите формулу для закона Ома для участка цепи.
3.В каких единицах измеряются ЭДС, напряжение и ток?
4.Какое соотношение между ЭДС и напряжением на зажимах источника питания?
5.Выведите формулу эквивалентного сопротивления участка цепи, состоящего из n последовательно соединенных сопротивлений.
6.Выведите формулу эквивалентного сопротивления участка цепи, состоящего из n параллельно соединенных сопротивлений.
7.Два сопротивления R1 и R2 соединены параллельно. Напишите формулу эквивалентного сопротивления.
8.Напишите формулу эквивалентного сопротивления участка це-
пи, состоящего из трех сопротивлений R1, R2 и R3, соединенных параллельно.
9.Изобразите схему, состоящую из источника питания с сопро-
тивлением r0 и двух приемников энергии с сопротивлениями R1 и R2, соединенных параллельно. Напишите формулу эквивалентного сопротивления всей цепи.
10.Изобразите схему с несколькими источниками питания и несколькими резисторами. Напишите формулу баланса мощностей для данной цепи.
11.Сформулируйте первый и второй законы Кирхгофа. Для примера изобразите электрические схемы и поясните на них сущность законов.
12.Объясните метод контурных токов.
13.Почему при расчете цепи, содержащей n узлов, можно по первому закону Кирхгофа составить только n–1 независимых уравнений?
14.В цепи несколько источников питания. Некоторые из них работают в режиме генератора, а остальные – в режиме нагрузки. По какому признаку определяется режим работы тех и других источников питания?
320