

Лабораторная работа №1
по курсу "Компьютерная томография"
МОДЕЛИРОВАНИЕ ЗАШУМЛЕННЫХ ИЗОБРАЖЕНИЙ. ОЦЕНКА ВИЗУАЛЬНОГО КАЧЕСТВА ЦИФРОВЫХ
ИЗОБРАЖЕНИЙ. КРИТЕРИИ КАЧЕСТВА
Цель работы: исследование процесса искажения цифрового изображения, ознакомление с критериями оценки качества изображения, проведение оценки качества изображения, сравнительный анализ полученных оценок качества изображения в зависимости от наложенной на исходное изображение модели шума.
1. Модель процесса искажения изображения [1]
Как
показано на Рис. 1, модель процесса
искажения изображения предполагает
действие некоторого искажающего
оператора ![]() на исходное изображение
на исходное изображение ![]() ,
что после добавления аддитивного шума
дает искаженное изображение
,
что после добавления аддитивного шума
дает искаженное изображение ![]() .
.
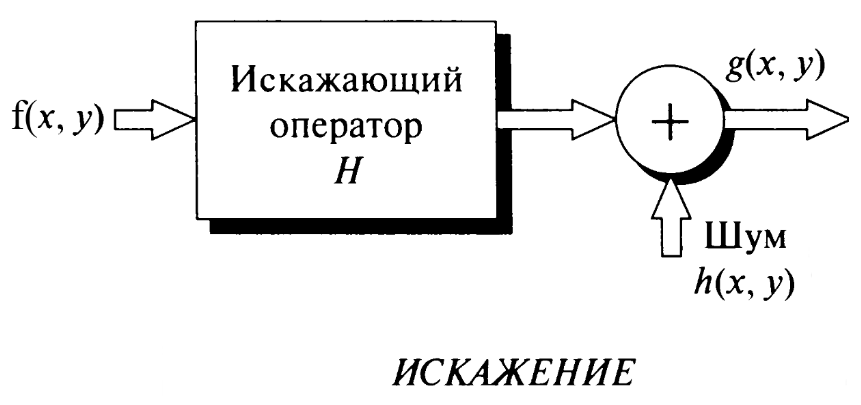
Рис. 1. Модель процесса искажения изображения
Искаженное изображение может быть представлено в пространственной области в виде:
![]() ,
,
где
![]() –
функция,
представляющая искажающий оператор в
пространственной области, а символ «
–
функция,
представляющая искажающий оператор в
пространственной области, а символ «![]() »
используется для обозначения свертки.
»
используется для обозначения свертки.
Основные источники шума на цифровом изображении — это сам процесс его получения (оцифровки), а также процесс передачи. Работа сенсоров зависит от различных факторов, таких как внешние условия в процессе видеосъемки и качество сенсоров. Например, в процессе получения изображения с помощью фотокамеры с ПЗС матрицей, основными факторами, влияющими на величину шума, являются уровень освещенности и температура сенсоров. В процессе передачи изображения могут искажаться помехами, возникающими в каналах связи.
Например, при передаче изображения с использованием беспроводной связи, оно может быть искажено в результате разряда молнии или других возмущений в атмосфере.
В рамках данной работы будем иметь дело с описанием поведения шума в пространственной области, которое основано на статистических свойствах значений яркости компоненты шума в модели на Рис. 1. Эти значения яркости могут рассматриваться как случайные величины, характеризующиеся функцией плотности распределения вероятностей. Ниже даны примеры функций плотности распределения вероятностей, которые наиболее часто встречаются в приложениях, связанных с обработкой изображений.
Гауссов шум. Математическая простота, характерная для работы с моделями гауссова шума (также называемого нормальным шумом) как в пространственной, так и в частотной области, обусловила широкое распространение этих моделей на практике. На самом деле эта простота оказывается столь привлекательной, что зачастую гауссовы модели используются даже в тех ситуациях, когда их применение оправдано, в лучшем случае, лишь частично.
Функция
плотности распределения вероятностей
гауссовой случайной величины ![]() задается
выражением
задается
выражением
![]() , (1)
, (1)
где
![]() представляет
собой значение яркости,
представляет
собой значение яркости, ![]() — среднее значение случайной величины
— среднее значение случайной величины
![]() (математическое ожидание),
(математическое ожидание),
![]() — ее
среднеквадратическое отклонение (СКО).
Квадрат среднеквадратического
отклонения
— ее
среднеквадратическое отклонение (СКО).
Квадрат среднеквадратического
отклонения ![]() называется дисперсией величины
называется дисперсией величины ![]() .
График
этой функции представлен на Рис. 2а.
.
График
этой функции представлен на Рис. 2а.
Шум Релея. Функция плотности распределения вероятностей шума Релея задается выражением
 (2)
(2)
Математическое
ожидание и дисперсия для этого
распределения имеют вид ![]() и
и
![]() .
.
График плотности распределения вероятностей шума Релея представлен на Рис. 2б. Обратите внимание на местоположение начала координат и на то обстоятельство, что график имеет асимметричную (перекошенную вправо) форму. Распределение Релея бывает полезно для приближения асимметричных гистограмм.

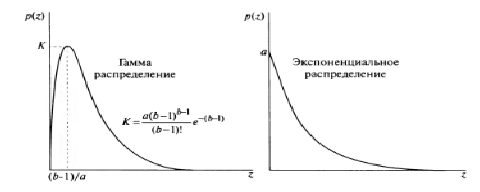

Рис. 2. Функции плотности распределения вероятностей
Шум Эрланга (гамма шум). Функция плотности распределения вероятностей шума Эрланга задается выражением
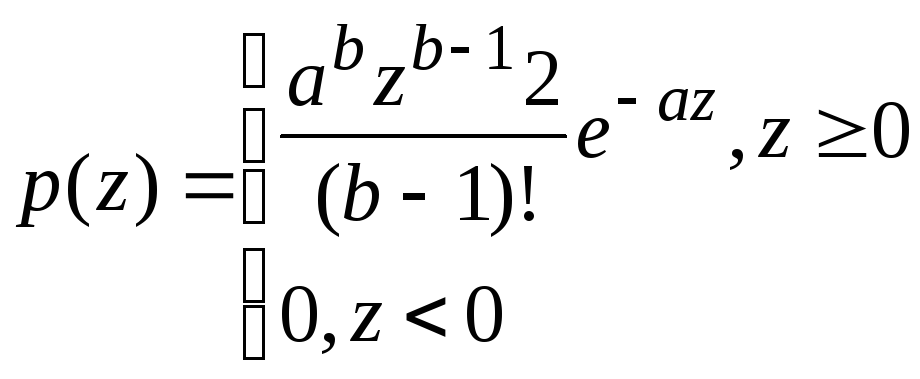 , (3)
, (3)
где
![]() ,
,
![]() — положительное
целое число и символ «!» обозначает
факториал. Математическое ожидание и
дисперсия для этого распределения имеют
вид
— положительное
целое число и символ «!» обозначает
факториал. Математическое ожидание и
дисперсия для этого распределения имеют
вид ![]() и
и ![]() .
.
На
Рис. 2в представлен график плотности
этого распределения. Выражение часто
называют гамма
распределением, хотя,
строго говоря, это название относится
к распределению более общего вида, когда
![]() не
является целым, а в знаменателе стоит
гамма-функция
не
является целым, а в знаменателе стоит
гамма-функция ![]() .
Рассматриваемый
частный случай правильнее называть
распределением
Эрланга.
.
Рассматриваемый
частный случай правильнее называть
распределением
Эрланга.
Экспоненциальный шум. Функция плотности распределения вероятностей экспоненциального шума задается выражением
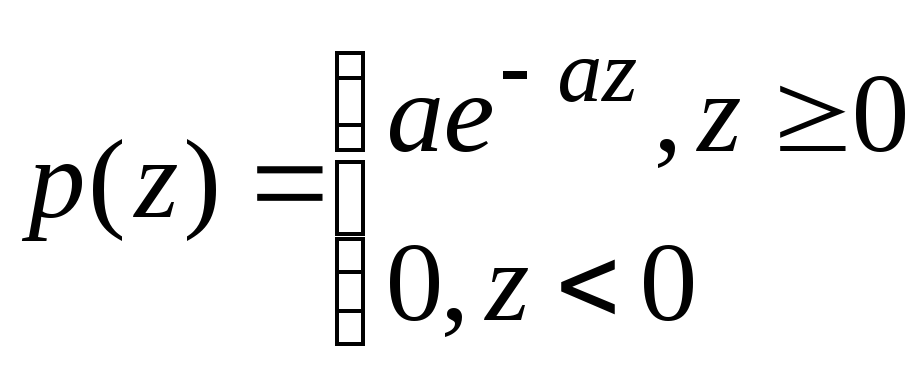 ,
(4)
,
(4)
где
![]() .
Среднее и дисперсия для этого распределения
имеют вид
.
Среднее и дисперсия для этого распределения
имеют вид
![]() и
и![]() .
.
Заметим,
что это распределение является частным
случаем распределения Эрланга с ![]() .
На Рис. 2г представлен график плотности
этого распределения.
.
На Рис. 2г представлен график плотности
этого распределения.
Равномерный шум. Функция плотности распределения вероятностей равномерного шума задается выражением
 ,
(5)
,
(5)
Среднее
значение для этого распределения равно
![]() ,
а дисперсия
,
а дисперсия ![]() .
.
На Рис. 2д представлен график плотности этого распределения.
Импульсный шум. Функция плотности распределения вероятностей (биполярного) импульсного шума задается выражением
 (6)
(6)
Если
![]() ,
то
пиксель с яркостью
,
то
пиксель с яркостью ![]() выглядит
как светлая точка на изображении.
Пиксель с яркостью a
выглядит,
наоборот, как темная точка. Если одно
из значений вероятности (
выглядит
как светлая точка на изображении.
Пиксель с яркостью a
выглядит,
наоборот, как темная точка. Если одно
из значений вероятности (![]() или
или
![]() )
равно
нулю, то импульсный шум называется
униполярным.
Если
ни одна из вероятностей не равна нулю,
и в особенности если они приблизительно
равны по величине, импульсный шум походит
на крупицы соли и перца, случайно
рассыпанные по изображению. По этой
причине импульсный шум называют также
шумом типа «соль
и перец».
)
равно
нулю, то импульсный шум называется
униполярным.
Если
ни одна из вероятностей не равна нулю,
и в особенности если они приблизительно
равны по величине, импульсный шум походит
на крупицы соли и перца, случайно
рассыпанные по изображению. По этой
причине импульсный шум называют также
шумом типа «соль
и перец».