

Лекция №1
Структурный синтез и имитационное моделирование дискретных систем.
Дискретно-детерминированные системы.
Примеры
Понятие конечного автомата
Способы представления конечного автомата
автомат Мура и Мили
автомат с памятью и без памяти
табличный
графический
матричный
Область применения
Дискретно-стохастические модели.
Лекция №1 Структурный синтез и имитационное моделирование дискретных детерминированных систем.
Большое количество различных устройств импульсной техники, вычислительной техники могут быть отнесены к дискретным детерминированным системам.
Пример 1. Устройство-делитель на 2

Значение выхода в этом примере зависит не только от входа, но и от внутреннего состояния, в отличие от ранее рассмотренных систем.
Таблица истинности
-
X
Y
1
1,0
0
1,0
Необходимо описать работу устройства на формальном языке. (автомат Мура).
Пример 2. Д- триггер – основной элемент всех регистров в вычислительных машинах.

D - информационный вход, Т- тактовый вход, Q- сигнал выхода триггера.
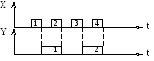
Временная диаграмма работы Д – триггера имеет вид:

Длительность и частота тактовых импульсов постоянна; информационный сигнал Д может меняться и в интервалы времени, когда отсутствуют тактовые импульсы.
Пример 3. RS – триггер

Входы S (установки) и R(сброса) используются для подачи сигналов, определяющих последующее состояние триггера. Однако, сигналы поступающие на эти входы, оказывают воздействие на триггер только в моменты поступления тактовых импульсов (или в моменты стробирования).
Если S=1, то Q=1.Если затем изменить S=0, то все равно выход не изменится: Q=1.
Если R=1, то Q=0 всегда не зависимо от состояния триггера, если затем R=0, то Q=0.
По логике работы триггера нельзя одновременно подавать сигнал 1 на вход R и S.
Временная диаграмма синхронного триггера имеет вид:

У асинхронного триггера нет синхронизации по тактовым импульсам.
При изучении функционирования таких дискретных систем обычно не рассматривают детально механизм процесса внутри объекта или системы, а интересуются в основном зависимостью выходных сигналов от входных и от внутреннего состояния объекта, т.е. внешним описание объекта.
Для описания таких дискретно-детерминированных систем в качестве математического аппарата используют теорию автоматов.
На основе этой теории система представляется в виде автомата, перерабатывающего дискретную информацию и меняющего свои внутренние состояния и выход лишь в допустимые моменты времени.
Автомат можно представить как некоторое устройство («черный ящик»), на которое подаются входные сигналы и снимаются выходные сигналы и которое может иметь некоторое внутреннее состояние.
Конечным автоматом называется автомат, у которого множество внутренних состояний и входных сигналов (а, следовательно, и множество выходных сигналов) являются конечными множествами.
Абстрактно конечный автомат (англ. Finite automata) можно представить как математическую схему (F-схему), характеризующуюся шестью элементами:
конечным множеством входных сигналов (входным алфавитом);
 ;
;конечным множеством выходных сигналов (выходным алфавитом);
 ;
;конечным множеством
 внутренних
состояний (внутренним алфавитом или
алфавитом состояний);
внутренних
состояний (внутренним алфавитом или
алфавитом состояний);начальным состоянием z0, z0
 ;
;функцией переходов φ(z,x);
функцией выходов ψ(z,x).
Автомат, задаваемый F-схемой:
F=![]()
![]() φ,ψ,z0
φ,ψ,z0![]()
функционирует в дискретном автоматном времени, моментами которого являются такты, т.е. примыкающие друг к другу равные интервалы времени, каждому из которых соответствуют постоянные значения входного и выходного сигналов и внутренние состояния.
Обозначим состояние,
а также входной и выходной сигналы,
соответствующие t-му
такту при t=0,1,2,…
через z(t),
x(t),
y(t),
при этом z(0)=z0,
а z(t)![]() ,x(t)
,x(t)![]() ,y(t)
,y(t)![]() .
.
В простейшем конечном автомате имеется один входной и один выходной каналы. Если на вход конечного автомата, установленного в начальное состояние z0, подавать в некоторой последовательности буквы входного алфавита x(0), x(1), x(2),…, т.е. входное слово, то на выходе автомата будут последовательно появляться буквы выходного алфавита y(0), y(1), y(2),…, образуя выходное слово.
Различают конечные F-автоматы первого и второго рода. Зависимость внутреннего состояния и выхода F-автомата первого рода, называемого также автоматом Мили можно описать следующими зависимостями:
![]() ,
t=0,1,2,… (1)
,
t=0,1,2,… (1)
![]() ,
t=0,1,2,… (2)
,
t=0,1,2,… (2)
Для F-автомата второго рода:
![]() ,
t=0,1,2,… (3)
,
t=0,1,2,… (3)
![]() ,
t=1,2,3… (4)
,
t=1,2,3… (4)
Автомат второго
рода, для которого
![]() ,t=0,1,2,…,
,t=0,1,2,…,
т.е. функция выходов зависит только от внутреннего состояния и не зависит от входной переменной x(t), называется автоматом Мура.
Примером простейшего автомата Мура является рассмотренный нами в примере №1 делитель на 2.
Примером автомата Мили является RS-триггер.
По числу состояний различают конечные автоматы с памятью и без памяти.
Автоматы с памятью имеют более одного состояния, а автоматы без памяти (комбинаторнные или логические) обладают лишь одним состоянием.
Работа автомата с одним состоянием (комбинационным) заключается в том, что она ставит в соответствие каждому входному сигналу x(t) определенный выходной сигнал, т.е. реализует логическую функцию вида
![]() ,
t=0,1,2,… (5)
,
t=0,1,2,… (5)
Эта функция
называется булевой,
если алфавиты
![]() и
и![]() ,
которым принадлежат значения сигналовx
и y,
состоят из двух букв.
,
которым принадлежат значения сигналовx
и y,
состоят из двух букв.
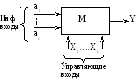
Пример автомата с одним состоянием, выходной сигнал которого описывается логической функцией – мультиплексор; т.е. устройство с n-входами (информационными) и 1 выходом и k-управляющими входами.
![]()
Мультиплексор в зависимости от комбинации управляющих сигналов на входе осуществляет связь того или иного входа с выходом.

![]()
Булева функция
имеет вид:
![]()
Переменные ai, xi и y могут принимать значения 0 или 1.
По характеру отсчета дискретного времени конечные автоматы делятся на синхронные и асинхронные.
В синхронных F-автоматах моменты времени, в которые автомат «считывает» входные сигналы, определяются принудительно синхронизирующими сигналами. После очередного синхронизирующего сигнала с учетом считанного и в соответствии с уравнениями (1-5) происходит переход в новое состояние и выдача сигнала на выходе, после чего автомат может воспринимать следующее значение входного сигнала.
Асинхронный F-автомат считывает входной сигнал непрерывно и поэтому, реагируя на достаточно длинный входной сигнал постоянной величины x, он может, как следует из (1-5), несколько раз изменять состояние, выдавая соответствующее число выходных сигналов, пока не перейдет в устойчивое, которое уже не может быть изменено данным входным.