

lab_mech9to18 / №1-11
.pdf1
Лабораторная работа № 1-11 ОСНОВНОЙ ЗАКОН ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
ТВЕРДОГО ТЕЛА
Э.Н.Колесникова
Цель работы
Изучение динамики вращательного движения твердого тела. Исследование зависимости угла поворота, угловой скорости, углового ускорения от времени; определение момента инерции поворотного стола.
Теоретическое введение
Любое сложное движение абсолютно твердого тела (т.е. тела, все точки которого сохраняют неизменное положение относительно друг друга) можно представить, как совокупность простых движений: поступательного и вращательного.
Поступательным движением твердого тела называют такое движение, при котором каждая линия, соединяющая две любые точки тела, перемещается параллельно самой себе. При поступательном движении смещение всех точек тела за любой промежуток времени одинаково, следовательно, все точки тела имеют в данный момент времени одинаковые скорости и ускорения.
Вращательным движением называется такое движение, при котором траектории всех точек тела являются концентрическими окружностями с центром на одной прямой, называемой осью вращения. Вращение тела характеризуется угловой скоростью и угловым ускорением. Причиной, вызывающей вращательное движение тела, является наличие моментов сил, действующих на тело
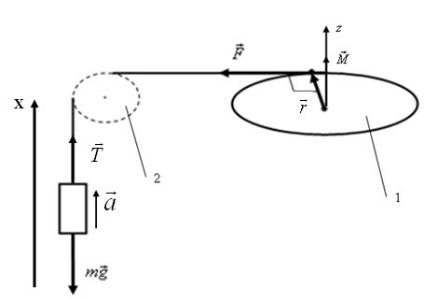
Моментом силы M относительно неподвижной точки О называется физическая
величина, определяемая векторным произведением радиуса-вектора r ,проведенного из |
|
|
точки О в точку А приложения силы, на силу F (рис. 1): |
(1) |
|
M = r F . |
||
r |
|
|
|
|
|
Вектор M – является псевдовектором (аксиальным), его направление совпадает с |
|
|
направлением поступательного движения правого винта при вращении его в направлении
от вектора r к вектору F . |
|
Модуль момента силы равен: |
|
M = Frsinα = Fl , |
(2) |
где α – угол между векторами r и F ; l = r sinα – плечо силы, т.е. кратчайшее |
|
расстояние между линией действия силы и точкой О.

2
Рис.1. Момент силы M относительно неподвижной точки О
Моментом силы относительно неподвижной оси z называется скалярная величина M z , равная проекции на эту ось вектора M момента силы, определенного относительно произвольной точки О данной оси z (рис.2).
Рис.2.Момент силы M z относительно неподвижной оси z
При вращении тела вокруг неподвижной оси все частицы тела совершают плоское движение, т.е. перемещаются в параллельных плоскостях. Линейные скорости и ускорения различных частиц тела различны, причем, чем дальше от оси вращения, тем больше эти характеристики. Угловая скорость ω одинакова для всех частей тела при его
3
вращении вокруг неподвижной оси. Изменение угловой скорости ω характеризуется величиной углового ускорения ε :
|
|
r |
|
dω |
|
|
|
|
ε |
= |
|
|
(3) |
|
dt |
|||||
Можно показать, что линейная V и угловая ω скорости связаны между собой |
|
|||||
соотношением: |
|
|
|
|
||
|
|
V = [ω r] |
(4) |
|||
Связь между угловым ускорением и моментом сил, действующих на тело, |
|
|||||
вращающееся вокруг неподвижной оси z, задается следующим соотношением: |
|
|||||
|
M z =Iz |
dωz |
=Izεz , |
(5) |
||
|
|
|||||
где M z |
dt |
|
||||
|
|
|
|
|
||
– проекция на ось z результирующего момента сил, действующего на тело; |
|
|||||
ωz и εz |
– проекции угловой скорости и углового ускорения на ось z; |
|
||||
Iz – момент инерции тела относительно данной оси вращения z. |
|
|||||
Понятие момента инерции уточним ниже. |
|
|||||
Последнее уравнение (5) представляет собой уравнение основного закона динамики |
|
|||||
вращательного движения твердого тела относительно неподвижной оси z. |
|
|||||
Это уравнение можно записать в векторном виде: |
(6) |
|||||
|
|
M |
|
, |
||
|
|
= I ε |
|
|||
если ось z совпадает с главной осью инерции, проходящей через центр масс.
Закон (6) аналогичен второму закону динамики для поступательного движения ( F = ma ), только вместо силы в него входит момент силы относительно оси, вместо
линейного ускорения – угловое, момент инерции тела относительно оси вращения – вместо массы.
Момент инерции – аналог массы: масса – мера инертности тела при поступательном движении, а момент инерции – мера инертности при вращательном движении. При вращении тела вокруг различных осей моменты инерции различны. Момент инерции тел зависит не только от величины массы тела, но и от распределения массы относительно оси. Важно отметить, что каждое тело обладает определенным моментом инерции относительно любой оси, независимо от того вращается оно или покоится, подобно тому, как тело обладает массой, независимо от того движется оно или покоится.
|
4 |
Моментом инерции тела (системы) относительно данной оси называется |
|
физическая величина, равная сумме произведений масс mi |
материальных точек тела |
(системы) на квадраты расстояний ri до рассматриваемой оси: |
|
n |
|
I = miri2 , |
(7) |
i=1 |
|
где n – количество материальных точек. |
|
В случае непрерывного распределения масс эта сумма сводится к интегралу |
|
I = r2 dm, |
(8) |
где интегрирование производится по всему объёму тела. |
|
Если учесть, что элементарная масса dm равна |
|
m =ρ dV , |
|
где ρ – плотность тела в элементе объёма dV , |
|
момент инерции равен: |
|
I = r2 ρdV . |
(9) |
При сложной форме поверхности, ограничивающей тело, при неравномерном распределении плотности аналитический расчет момента инерции тела может быть очень сложной задачей.
Однако экспериментальное определение момента инерции твердого тела осуществляется довольно просто, что мы и продемонстрируем в данной лабораторной работе.
Рис.3.Схема экспериментальной установки.
5
Пусть диск 1 на рисунке 3 вращается под действием момента силы F , равного
r (1), причем r F .
M = r F
В рассматриваемом случае векторы момента силы F и положительное направление оси вращения z совпадают, и направлены вертикально вверх. Следовательно, проекция
момента силы M z относительно оси z равна его модулю |
|
M = rF , |
(10) |
а момент инерции диска: Iz = I . |
|
Вращающий момент M рассчитывается по формуле: |
|
M = r m g, |
(11) |
где r – радиус вращающегося диска, m – масса груза, g = 9.81 м/с2 |
– ускорение |
свободного падения (справедливость этого соотношения вытекает из следующих условий: груз m движется с ускорением a = g , диск 2 – невесомый, нити невесомы и нерастяжимы, трение при вращении диска 1 отсутствует).
Таким образом, уравнение вращательного движения диска в скалярном виде имеет вид:
r m g = Iε . |
(12) |
Отсюда определим момент инерции диска, зная его радиус r , массу груза m и угловое ускорение ε :
I = |
m g r . |
(13) |
|
ε |
|
Подробный вывод формулы (13) смотри в приложении.
Приложение.
Уравнение поступательного движения груза m в проекции на ось х имеет вид (см.
рис.3):
ma = mg −T . |
(14) |
Уравнение вращательного движения диска 1 относительно оси z имеет вид: |
|
Iε = F r . |
(15) |
Если нить и диск 2 - невесомы, то |
|
T = F . |
(16) |
6
Если нить нерастяжима и не проскальзывает по диску 2, то связь между линейным ускорением груза и угловым ускорением блока выражается следующим соотношением:
a = ε r . |
(17) |
Решая совместно уравнения (14) и (15) с учетом условий (16) и (17), получим выражения линейного a и углового ε ускорений:
a = |
|
|
g |
|
,ε = |
mgr |
|
|
1+ |
I |
|
I + mr2 . |
(18) |
||||
|
|
|
||||||
|
mr2 |
|
|
|
|
|
||
Анализ выражений (18) показывает, что линейное ускорение груза a и угловое ускорение ε диска не зависят от времени. Так как диск вращается с постоянным угловым ускорением ε , угол поворота ϕ и угловая ω скорость диска зависят от времени следующим образом:
ϕ = |
ε t2 |
, ω = ε t |
(19) |
|
2 |
|
|
В данной работе масса груза много меньше массы диска 1, поэтому mr2 = 1, a = g , и для углового ускорения диска можно получить приближенное выражение:
ε mgr . |
(20) |
I |
|
Из последней формулы, получим выражение для определения момента инерции диска:
I = mgr |
|
(21) |
ε |
|
|
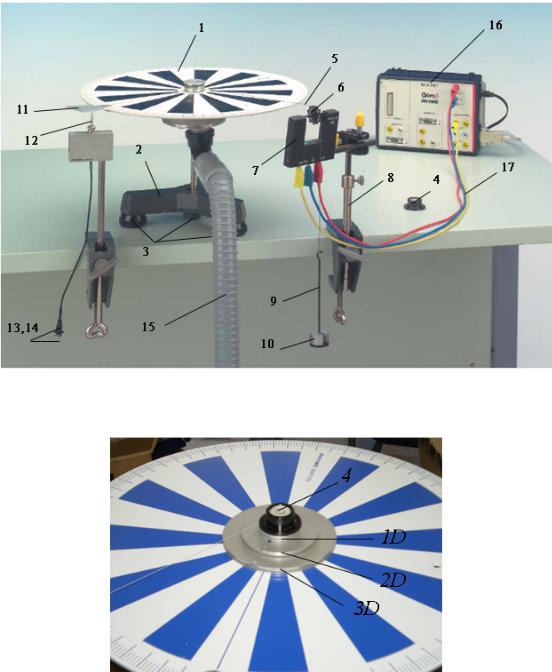
Описание экспериментальной установки
Общий вид экспериментальной установки показан на рисунке 4.
Поворотный стол 1 с угловой шкалой закреплен в штативе 2 с регулируемыми ножками 3, которые позволяют установить стол строго горизонтально. Для контроля горизонтальности установки стола используется прибор 4 (уровень с воздушным пузырьком внутри), помещаемый в центре стола. Вращая ножки 3 штатива 2, устанавливают пузырек воздуха в центре уровня 4.
Три исследуемых сплошных диска разного диаметра (рис. 4а) закреплены в центре поворотного стола. На один из дисков (в зависимости от индивидуального задания)
7
наматывается шелковая нить 5 примерно 15-20 раз вокруг оси вращения (для этого на боковой поверхности дисков имеются небольшие углубления).
Рис.4. Общий вид экспериментальной установки.
Рис. 4 а. Поворотный диск с уровнем и тремя дополнительными дисками для наматывания нити.
Далее нить протягивается через колесико 6 светового барьера 7. Световой барьер с помощью держателя 8 устанавливается таким образом, чтобы нить располагалась строго горизонтально.
8
Конец шелковой нити прикрепляется к держателю 9 массой 10 г, на котором можно размещать дополнительные перегрузки 10. Необходимо настроить установку так, чтобы держатель с перегрузками висели вертикально и могли опускаться свободно.
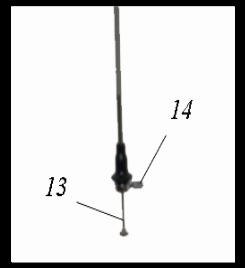
Апертурную пластину 11 поворотного столика помещают в стартовую позицию и фиксируют с помощью спускового механизма 12, который располагают на ~ 1мм выше апертурной пластины поворотного стола, для чего надо нажать на стержень 13 и закрутить винт 14 (Рис. 4б).
Рис. 4 б. Устройство для фиксации поворотного диска.
Для исключения трения при вращении поворотного стола по гофрированной трубе 15 подается под давлением воздух с помощью турбокомпрессора (на рисунке 4 – не изображен). Для этого надо включить турбокомпрессор (переключатель поставить в положение 1), и увеличить поток воздуха, вращая регулятор компрессора по часовой стрелке до цифры ~5.
При этом поворотный стол «всплывает» - оказывается на воздушной подушке. Чтобы поворотный стол пришел в движение, надо отпустить спусковой механизм 12, отвернув винт 14 (Рис.4 б).
Световой барьер 7 устроен таким образом, что внутри него справа расположен фотодиод, излучающий электромагнитные волны в непрерывном режиме, а слева – приемник этого излучения. При вращении колесика 6 светового барьера постоянный сигнал, фиксируемый фотоприемником, преобразуется в переменный. Частота сигнала зависит от частоты вращения колесика (в нём имеются отверстия, расположенные на определенном расстоянии друг от друга).
9
Переменный сигнал от светового барьера 7 по проводам 17 передается на электронный
блок Cobra 3 16.
Экспериментальные результаты с электронного блока Cobra 3 передаются на компьютер, затем эти результаты обрабатываются по специальной программе, позволяющей строить графические зависимости угла поворота диска, угловой скорости, углового ускорения и другие характеристики в зависимости от времени.
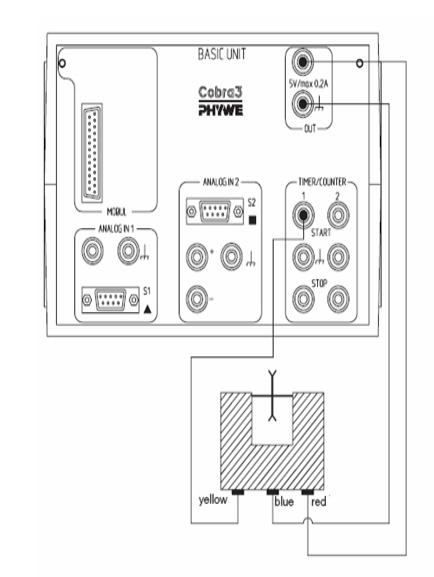
На рисунке 5 показана схема подключения светового барьера к блоку Cobra 3.
Рис.5. Схема подключения светового барьера к блоку Cobra 3.
.Технические характеристики приборов, используемых в данной работе, должны быть занесены в таблицу 1.
Таблица 1. Технические данные приборов.
10
Прибо |
Пределы |
Число |
Цена |
Класс |
Абсолютная |
|
р |
приборная |
|||||
измерений |
делений |
деления |
точности |
|||
|
погрешность |
|||||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
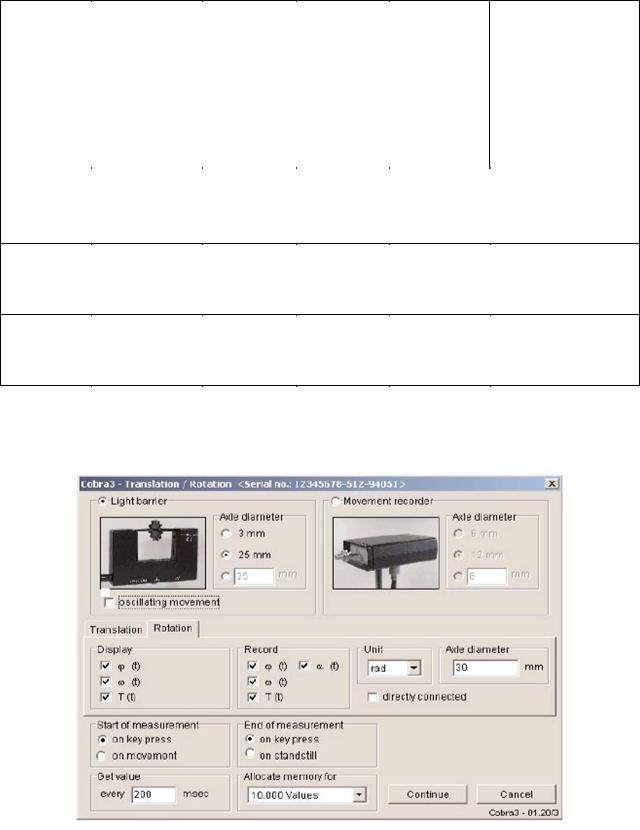
На рисунке 6 показано диалоговое окно компьютера, в котором заполняются параметры измерения.
Рис.6. Диалоговое окно с выставленными параметрами измерений.
В верхней части окна изображено два прибора. В данной лабораторной работе используется световой барьер 7, изображенный слева, его надо выделить щелчком мыши