

delete [] a[i];
delete [] a; delete [] b; delete [] x; }
7.2.Вычисление обратной матрицы методом Гаусса
ЗАДАЧА 7.2. Найти обратную матрицу к квадратной матрицы A(N,N).
|
a00 |
a01 ... |
a0n−1 |
|
A= |
a10 |
a11 ... |
a1n−1 |
(7.5) |
a20 |
a21 ... |
a2n−1 |
||
|
an−10 |
... |
an−1n−1 |
|
Найти матрицу A–1: |
an−11 ... |
|
||
|
|
|
|
|
|
y00 |
y01 ... |
y0n−1 |
|
A-1= |
y10 |
y11 ... |
y1n−1 |
(7.6) |
|
yn−10 |
... |
yn−1n−1 |
|
|
yn−11 ... |
|
Матрица (7.6) будет обратной к матрице (7.5), если выполняется соотношение
A A−1=E ,
где Е – это единичная матрица, или подробнее:
|
a00 |
a01 ... |
a0n−1 |
|
y00 |
y01 ... |
y0n−1 |
|
1 |
0 |
... |
0 |
||
|
|
|
|
|
||||||||||
|
a10 |
a11 ... |
a1n−1 |
|
|
y10 |
y11 ... |
y1n−1 |
|
|
0 |
1 |
... |
0 |
|
a20 |
a21 ... |
a2n−1 |
|
× y20 |
y21 ... |
y2n−1 |
|
= 0 |
0 |
... |
1 |
||
|
|
... |
|
|
|
|
... |
|
|
|
0 |
... |
|
1 |
an−10 |
an−11 ... |
an−1n−1 |
|
yn−10 |
yn−11 ... |
yn−1n−1 |
|
0 |
... |
|||||
Умножение матрицы (7.5) на нулевой столбец матрицы (7.6) даст нулевой столбец единичной матрицы:
a00 y00 a01 y10 ... a0n−1 yn−10=1 a10 y00 a11 y10 ... a1n−1 yn−10=0
...
an−10 y00 an−11 y10 ... an−1n−1 yn−10=0
Система, полученная в результате умножения матрицы (7.5) на i-й столбец матрицы (7.6), будет выглядеть так:
a00 y0i a01 y1i ... a0n−1 yn−1i =0 a10 y0i a11 y1i ... a1n−1 yn−1i=0
...
ai0 y0i ai1 y1i ... a¿−1 yn−1i=1
...
an−10 y0i an−11 y1i ... an−1n−1 yn−1i=0
28
А n-я система будет иметь вид:
a00 |
y0n−1 a01 |
y1n−1 ... a0n−1 yn−1n−1=0 |
|
a10 |
y0n−1 a11 |
y1n−1 ... a1n−1 yn−1n−1=0 |
. |
|
|
... |
|
|
|
|
an−10 y0n−1 an−11 y1n−1 ... an−1n−1 yn−1n−1=1
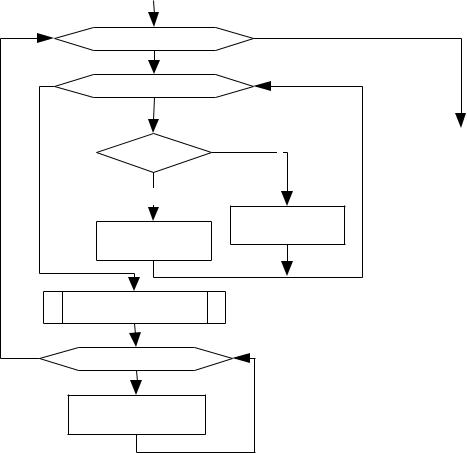
Алгоритм нахождения обратной матрицы представлен в виде блок-схемы на рис. 7.5. Блоки 2–5 отражают формирование столбца единичной матрицы. Если условие 3 выполняется и элемент находится на главной диагонали, то он равен единице, все остальные элементы нулевые. В блоке 6 происходит вызов подпрограммы для решения системы уравнений методом Гаусса. В качестве параметров в эту подпрограмму передается исходная матрица А, сформированный в пунктах 2–5 вектор свободных коэффициентов В, размерность системы n. Вектор X будет решением i-ой системы уравнений и, следовательно, i- ым столбцом искомой матрицы Y.
1 |
|
|
i=0; i<n; i++ |
|
|
|
1 |
|
2 |
|
|
j=0; j<n; j++ |
|
|
3 |
j=i |
- |
|
||
|
+ |
5 |
4 |
|
|
Bj = 1 |
Bj = 0 |
|
|
|
|
6
GAUSS(A,n,B,X)
7 j=0; j<n; j++
8
Yji = Xj
Рис 7.5. Блок-схема нахождения обратной матрицы
int SLAU(double **matrica_a, int n, double *massiv_b, double *x)
{
int i,j,k,r;
double c,M,max,s, **a, *b; a=new double *[n];
for(i=0;i<n;i++) a[i]=new double[n];
29
b=new double [n]; for(i=0;i<n;i++)
for(j=0;j<n;j++) a[i][j]=matrica_a[i][j];
for(i=0;i<n;i++) b[i]=massiv_b[i];
for(k=0;k<n;k++)
{max=fabs(a[k][k]);
r=k;
for(i=k+1;i<n;i++)
if (fabs(a[i][k])>max)
{max=fabs(a[i][k]);
r=i;}
for(j=0;j<n;j++)
{c=a[k][j];
a[k][j]=a[r][j];
a[r][j]=c; }
c=b[k]; b[k]=b[r]; b[r]=c; for(i=k+1;i<n;i++)
{for(M=a[i][k]/a[k][k],j=k;j<n;j++)
a[i][j]-=M*a[k][j]; b[i]-=M*b[k];
}
}
if (a[n-1][n-1]==0) if(b[n-1]==0) return -1; else return -2;
else {for(i=n-1;i>=0;i--)
{for(s=0,j=i+1;j<n;j++)
s+=a[i][j]*x[j]; x[i]=(b[i]-s)/a[i][i];
}return 0; } for(i=0;i<n;i++) delete [] a[i]; delete [] a;
delete [] b;
}
int INVERSE(double **a, int n, double **y)
{int i,j,res; double *b, *x; b=new double [n]; x=new double [n]; for(i=0;i<n;i++) {for(j=0;j<n;j++)
30
if (j==i) |
b[j]=1; else |
b[j]=0; |
|
res=SLAU(a,n,b,x); |
|
||
if (res!=0) break; |
|
||
|
elsefor(j=0;j<n;j++) |
|
|
} |
|
y[j][i]=x[j]; |
|
|
|
|
|
delete [] x; |
|
|
|
delete [] b; |
|
return -1; |
|
if (res!=0) |
|
|
|
else |
return 0;} |
|
|
int main() |
|
|
|
{int result,i,j,N; double **a, **b; cout<<"N="; cin>>N; a=new double *[N]; for(i=0;i<N;i++)
a[i]=new double[N]; b=new double *[N]; for(i=0;i<N;i++)
b[i]=new double[N]; cout<<"Input Matrix A"<<endl; for(i=0;i<N;i++)
for(j=0;j<N;j++)
cin>>a[i][j];
result=INVERSE(a,N,b); if (result==0)
{cout<<"Inverse matrix"<<endl; for(i=0;i<N;cout<<endl,i++)
for(j=0;j<N;j++)
cout<<b[i][j]<<"\t";
}
else cout<<"No Inverse matrix"<<endl; for(i=0;i<N;i++)
delete [] a[i]; delete [] a; for(i=0;i<N;i++)
delete [] b[i]; delete [] b;
}
7.3. Вычисление определителя методом Гаусса
ЗАДАЧА 7.3. Найти определитель квадратной матрицы A(N,N).
Для верхнетреугольной матрицы определитель вычисляется как
n−1
произведение элементов , лежащих на главной диагонали det A=∑ aii .
i=0
31
Поэтому матрицу вначале преобразуем к верхнетреугольному виду, а затем |
||||
найдем произведение элементов на главной диагонали. |
||||
Преобразование матрицы (7.2) к виду (7.3) можно осуществить с помощью |
||||
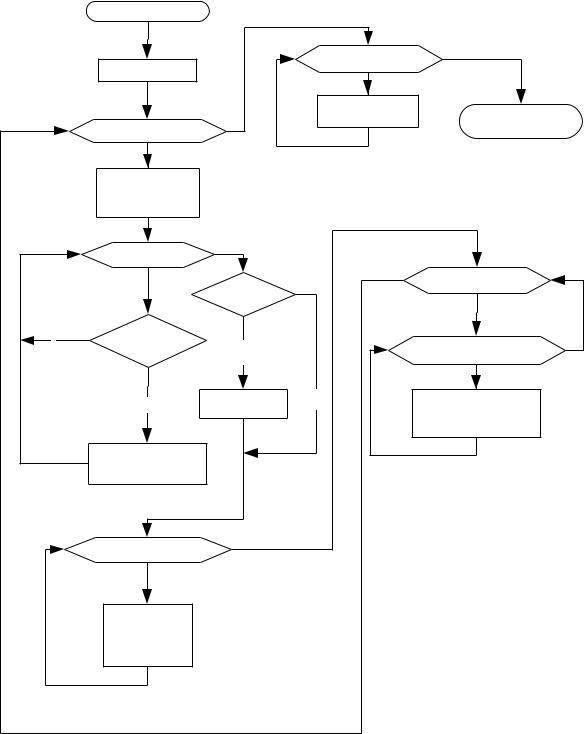
прямого хода метода Гаусса. Алгоритм вычисления определителя матрицы, |
||||
изображенный в виде блок-схемы на рис. 7.6, представляет собой алгоритм |
||||
прямого хода метода Гаусса, в процессе выполнения которого проводится |
||||
перестановка строк матрицы. |
|
|
||
|
1 |
|
|
|
|
Determinant(a,n) |
|
|
|
|
|
|
15 |
|
|
2 det=1 |
|
i=0; i<n; i++ |
|
|
|
|
16 |
17 |
|
3 |
|
det*=a[i][i] |
|
|
|
|
Конец |
|
|
k=0; k<n; k++ |
|
|
|
|
4 |
|
|
|
|
max=|a[k][k]| |
|
|
|
|
r=k |
|
|
|
|
5 i=k+1,n |
|
|
12 |
|
8 |
r!=k |
|
i=k+1; i<n;i++ |
|
6 |
|
|
13 |
- |
|a[i][k]|>max |
+ |
|
|
|
M=a[i][k],j=k;j<n;j++ |
|||
|
|
|
||
|
9 |
- |
14 |
|
|
+ |
det=-det |
a[i][j]-=M a[k][j] |
|
|
|
|
|
|
|
7 |
|
|
|
|
max:=|a[i][k]| |
|
|
|
|
r:=i |
|
|
|
|
10 |
|
|
|
|
j=0; j<n; j++ |
|
|
|
|
11 |
|
|
|
|
c=a[k][j] |
|
|
|
|
a[k][j]=a[r][j] |
|
|
|
|
a[r][j]=c |
|
|
|
Рис 7.6. Блок-схема вычисления определителя квадратной матрицы |
||||
32
Если строки в матрице поменять местами, то определитель матрицы меняет знак на противоположный. В блок-схеме момент смены знака отражен в блоках 8–9. В блоке 8 определяется, будут ли строки меняться местами, и если ответ утвердительный, то в блоке 9 происходит смена знака определителя. В блоках 15– 16 выполняется непосредственное вычисление определителя путем
перемножения диагональных элементов преобразованной матрицы. double determinant(double **matrica_a, int n)
{int i,j,k,r; double c,M,max,s,det=1, **a; a=new double *[n];
for(i=0;i<n;i++) a[i]=new double[n]; for(i=0;i<n;i++)
for(j=0;j<n;j++) a[i][j]=matrica_a[i][j];
for(k=0;k<n;k++)
{
max=fabs(a[k][k]); r=k;
for(i=k+1;i<n;i++) |
|
|
|
if (fabs(a[i][k])>max) |
r=i; |
} |
|
{ |
max=fabs(a[i][k]); |
||
if (r!=k) det=-det; |
|
|
|
for(j=0;j<n;j++) |
|
a[r][j]=c; } |
|
{c=a[k][j]; a[k][j]=a[r][j]; |
|
||
for(i=k+1;i<n;i++)
for(M=a[i][k]/a[k][k],j=k;j<n;j++) a[i][j]-=M*a[k][j];
}
for(i=0;i<n;i++)
det*=a[i][i]; return det;
} |
|
int main() |
|
{ |
|
int result,i,j,N; |
|
double **a, b; |
cin>>N; |
cout<<"N="; |
|
a=new double *[N]; |
a[i]=new double[N]; |
for(i=0;i<N;i++) |
cout<<"Input Matrix A"<<endl; for(i=0;i<N;i++)
for(j=0;j<N;j++)
cin>>a[i][j];
cout<<"determinant="<<determinant(a,N)<<endl;
for(i=0;i<N;i++) delete [] a[i];
delete [] a;}
33