

20.3. Пример расчета балки в виде системы с одной степенью свободы
Проверить прочность балки
в рабочем режиме вибратора, расположенного
по середине пролета балки (рис.20.2, а),
учитывая только вертикальную составляющую
вертикальной силы:
![]() ,
принимая:G = 15 кН - вес
вибратора; Р0 = Pa = 3 кН - вес
неуравновешенных частей вибратора;
e = 0,01 м - эксцентриситет
относительно оси вращения неуравновешенных
частей;
,
принимая:G = 15 кН - вес
вибратора; Р0 = Pa = 3 кН - вес
неуравновешенных частей вибратора;
e = 0,01 м - эксцентриситет
относительно оси вращения неуравновешенных
частей;
![]() = 30 с-1
-
круговая частота внешней силы;
l = 4 м - пролет
балки. Поперечное сечение балки выполнено
из двутавра №20, материал Ст3. Следовательно,
Е=2,1×108
кН/м2
-
модуль деформации материалов;
Jx =1,84×10-5 м4
- момент
инерции; Wx = 1,84×10-4 м3 - момент
сопротивления поперечного сечения;
R = 25×104 кН/м2 - расчетное
сопротивление;
= 30 с-1
-
круговая частота внешней силы;
l = 4 м - пролет
балки. Поперечное сечение балки выполнено
из двутавра №20, материал Ст3. Следовательно,
Е=2,1×108
кН/м2
-
модуль деформации материалов;
Jx =1,84×10-5 м4
- момент
инерции; Wx = 1,84×10-4 м3 - момент
сопротивления поперечного сечения;
R = 25×104 кН/м2 - расчетное
сопротивление;
![]() = 0,1- логарифмический
декремент. Интенсивность распределенных
нагрузок принимается равной: q = 4 кН/м.
= 0,1- логарифмический
декремент. Интенсивность распределенных
нагрузок принимается равной: q = 4 кН/м.
На первом этапе для выполнения
расчетов необходимо определить величину
коэффициента динамичности. Для этого
сначала определим величину коэффициента
затухания
![]() .
.
Воспользуемся эпюрой
моментов, изображенной на рис.20.2, б
и по формуле Мора определим
![]() :
:
![]() .
.
Круговая частота собственных колебаний без учета затуханий:

![]() c-1.
c-1.
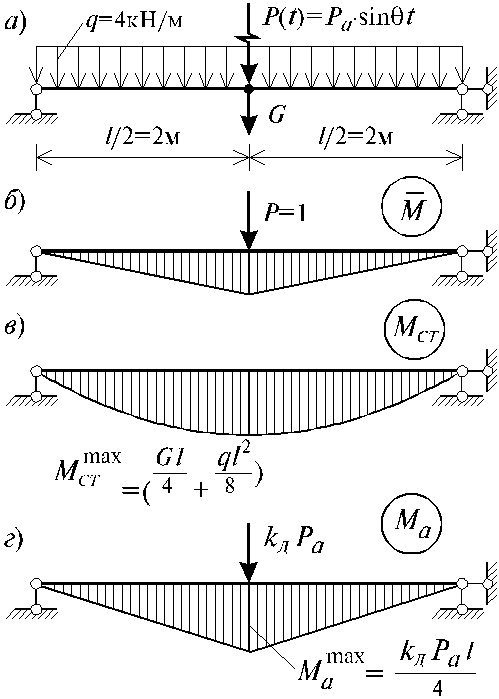
Рис.20.2
Собственная частота системы с учетом затухания колебания принимает значения:
 c-1.
c-1.
Коэффициент динамичности определяется из (14.10) по формуле:

 .
.
Последовательно определим максимальное значение момента в опасном сечении (рис.20.2, в, г) от статических и динамических сил:
![]() кН×м;
кН×м;
![]() кН×м.
кН×м.
Максимальное напряжение в опасном сечении принимает значение:
![]() кН/м2,
кН/м2,
т.е. прочность конструкций обеспечена.
20.4. Свободные колебания системы с произвольнымчислом степеней свободы
Рассмотрим свободные колебания системы с конечным числом степеней свободы. В качестве объекта рассмотрим упругую невесомую балку, изображенную на рис.14.3 и с n сосредоточенными массами m1, m2, m3,..., mn. Пренебрегаем продольными деформациями оси балки в процессе колебаний. При этом положение системы однозначно определяется перемещениями сосредоточенных масс yi (t) (i = 1,2,3,...,n) в произвольные моменты времени t, вызванными упругими деформациями балки в поперечном направлении.

Рис.14.3
Во время движения,
пренебрегая сопротивлением внутренних
и внешних сил, на балку будут действовать
в качестве внешних сил инерционные силы
![]() ,
(i = 1,2,3,...,n).
Применяя метод сил, перемещение
произвольной массы yi (t)
записывается в виде суммы:
,
(i = 1,2,3,...,n).
Применяя метод сил, перемещение
произвольной массы yi (t)
записывается в виде суммы:
![]() ,
(14.11)
,
(14.11)
где
![]() - перемещение
i-ой
массы от статической единичной силы,
приложенной к k-ой
массе от статической единичной силы по
направлению соответствующей инерционной
силы.
- перемещение
i-ой
массы от статической единичной силы,
приложенной к k-ой
массе от статической единичной силы по
направлению соответствующей инерционной
силы.
Подставляя выражение инерционных сил в систему уравнений (14.11), получим:
![]() ,
(i = 1,2,3,...,n).
(14.12)
,
(i = 1,2,3,...,n).
(14.12)
Система дифференциальных уравнений движения (14.12), описывающая свободные колебания заданной балки, представляет собой замкнутую систему дифференциальных уравнений второго порядка с постоянными коэффициентами, решение которой в общем случае записывается в виде:
![]() .
(14.13)
.
(14.13)
Рассмотрим одно частное произвольное решение соответствующее r-ой форме колебаний:
![]() .
(14.14)
.
(14.14)
Подставляя (14.14) в (14.12) получим:
 ,
(14.15)
,
(14.15)
которое распадается на две группы уравнений:
![]() (14.16)
(14.16)
и
 (14.17)
(14.17)
Решение уравнения (14.16) записывается в виде:
![]() ,
(r = 1,2,3,...,n).
(14.18)
,
(r = 1,2,3,...,n).
(14.18)
Как видно из
(14.18), по произвольной форме r = 1,2,3,...,n
колебания происходят по гармоническому
закону с частотой
![]() .
Здесь
.
Здесь![]() - частота
собственных колебаний заданной системы,
соответствующая r-ой
форме.
- частота
собственных колебаний заданной системы,
соответствующая r-ой
форме.
Согласно (14.14)
![]() - является
перемещением i-ой
массы при r-ой
форме колебания, значения которой
определяется из решения системы
алгебраических уравнений (14.17).
- является
перемещением i-ой
массы при r-ой
форме колебания, значения которой
определяется из решения системы
алгебраических уравнений (14.17).
Система (14.17)
относительно
![]() (i = 1,2,3,...,n)
имеет различные решения. Очевидно,
решение
(i = 1,2,3,...,n)
имеет различные решения. Очевидно,
решение
![]() º 0 свидетельствует
об отсутствии движения системы, т.е.
состояние покоя системы, которое нас
не интересует.
º 0 свидетельствует
об отсутствии движения системы, т.е.
состояние покоя системы, которое нас
не интересует.
Система (14.17) может иметь решения, отличные от нулевого лишь в том случае, когда ее определитель равен нулю, т.е. когда выполняется условие:
 ,
(14.19)
,
(14.19)
где принято
обозначение
![]() .
.
Раскрывая
определитель (14.19), получаем уравнения
n-ой
степени относительно
![]() ,
а при его решении получим n
значений
,
а при его решении получим n
значений
![]() .
Каждому значению
.
Каждому значению
![]() (r = 1,2,3,...,n)
будет соответствовать своя собственная
частота:
(r = 1,2,3,...,n)
будет соответствовать своя собственная
частота:
![]() ,
,
и свой собственный вектор:
![]() .
.
При этом собственные формы упругих систем ортогональны между собой:
![]() ,
(r,k = 1,2,3,...,n; r ¹ k).
(14.20)
,
(r,k = 1,2,3,...,n; r ¹ k).
(14.20)
Величины
![]() непосредственно
из решения (14.17) определить нельзя, они
могут быть найдены с точностью до
произвольного постоянного множителя, т.е.
по существу могут быть найдены отношения
между
непосредственно
из решения (14.17) определить нельзя, они
могут быть найдены с точностью до
произвольного постоянного множителя, т.е.
по существу могут быть найдены отношения
между
![]() .
Принимая обозначения
.
Принимая обозначения
![]() система (14.17)
преобразуется в вид:
система (14.17)
преобразуется в вид:

Последняя система
имеет одно лишнее уравнение, так как
имеем n
уравнений относительно (n-1)
неизвестных
![]() .
Отбрасывая одно из этих уравнений, решая
оставшуюся систему определяют все
неизвестные
.
Отбрасывая одно из этих уравнений, решая
оставшуюся систему определяют все
неизвестные![]() .
.
Далее, полагая
![]() ,
по формуле
,
по формуле
![]() определяются все остальные амплитуды
перемещений масс приr-ой
произвольной форме колебаний.
определяются все остальные амплитуды
перемещений масс приr-ой
произвольной форме колебаний.
Возвращаясь к выражению (14.13) с учетом (14.18) можем записать:
![]() (14.21)
(14.21)
Учитывая, что
![]() ,Ar
и Br
являются произвольными постоянными,
решение (14.21) можно записать в более
удобной форме:
,Ar
и Br
являются произвольными постоянными,
решение (14.21) можно записать в более
удобной форме:
![]()
![]() и
и
![]() можно выразить через начальные условия
каждой массы приt = 0,
которыми являются перемещения
i-ой
массы
можно выразить через начальные условия
каждой массы приt = 0,
которыми являются перемещения
i-ой
массы
![]() и ее скорости
и ее скорости![]() ,
и следовательно, задача о свободных
колебаниях системы с произвольным
числом свободы будет полностью решена.
,
и следовательно, задача о свободных
колебаниях системы с произвольным
числом свободы будет полностью решена.