

3. Порядок выполнения домашнего задания
1. Построить модель контура управления объектом в соответствии со схемой, представленной на рис.1.
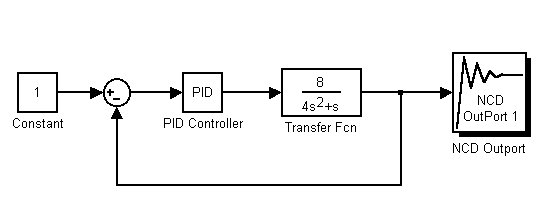
Рис. 1
2. Для настройки модели объекта необходимо отредактировать параметр Denominator блока Transfer Fcn. При этом задать в качестве его значения вектор [4 1 0]: рис. 2.
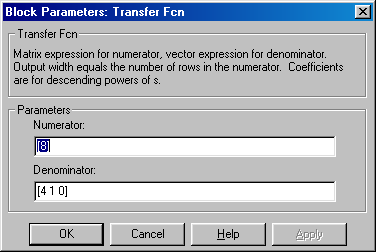
Рис. 2
3. Инициализировать переменные Kp=1; Ki=1; Kd=1; и настроить параметры блока PID Controller (см. рис.3), вводя в поле параметра Proportional переменную Kp, в поле Integral - Ki, а в поле Derivative - Kd.
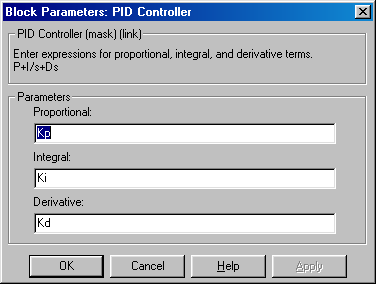
Рис. 3
4. Таким образом, мы сформировали модель контура управления объектом и теперь можем приступить к заданию ограничений, налагаемых на выход системы (блока Transfer Fcn). Дважды щелкнув по блоку NCD Outport, получим окно, представленное на рис. 4.
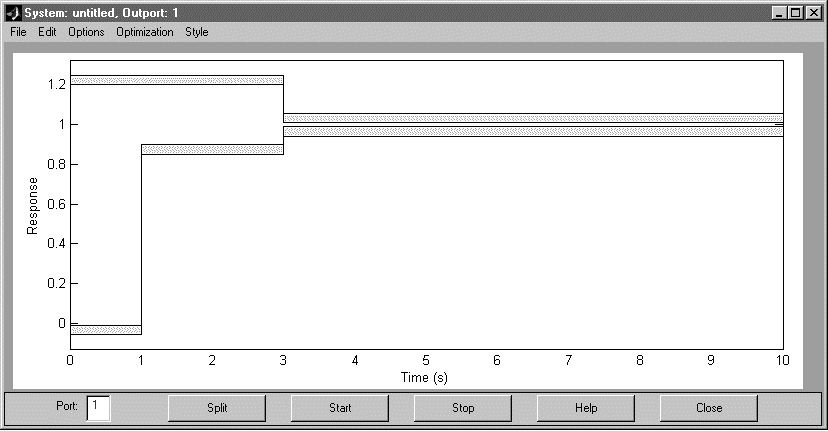
Рис. 4
Установить коридор, в пределах которого должен находиться входной сигнал блока NCD Outport в соответствии с требованиями задачи. Это можно сделать, передвигая красные линии, являющиеся границами коридора, при помощи мыши. Местоположение этих линий можно установить точно (не в визуальном режиме) при помощи диалоговой панели Constraint Editor, возникающей при щелчке правой кнопкой мыши по линии (рис. 5).
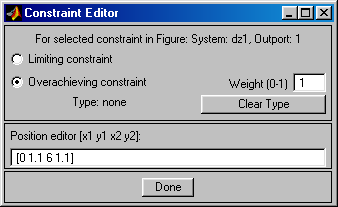
Рис. 5
5. Далее необходимо выбрать пункт Parameters… меню Optimization. При этом откроется окно, в котором необходимо перечислить имена настраиваемых переменных Kp, Ki, Kd в поле Tunable Variables (рис. 6). В этом окне также изменим значение поля Discretization interval на 0.1 и поставить "галочку" напротив поля Stop optimization as soon as the constraints are achieved (для прекращения процесса оптимизации после того, как выполнены все ограничения). После внесения указанных изменений нажимаем кнопку Done.
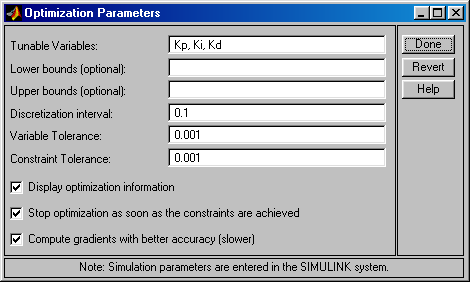
Рис. 6
6. Нажать на кнопку Start и пронаблюдать за развитием процесса. Для каждого этапа оптимизации в окне отображаются графики сигнала, соответствующие начальным (белый цвет) и текущим (зеленый цвет) значениям настраиваемых параметров (рис. 7).
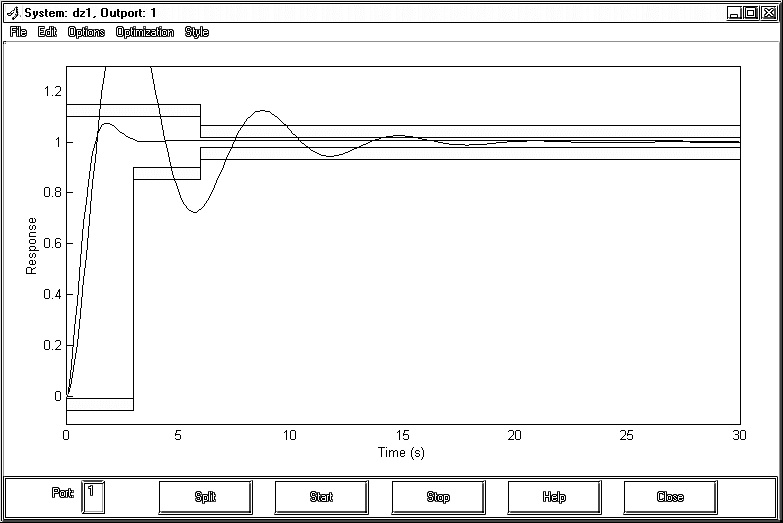
Рис. 7
По окончании процесса оптимизации, оптимальные значения настраиваемых переменных, соответствующие кривой зеленого цвета, сохраняются в рабочем пространстве используемого пакета. В данном случае
Kp = 2.4084
Kd = 1.2436
Ki = 0.0254
7. Далее необходимо подать на систему следующие тестовые воздействия:
Задания в виде константы
Задания в виде синусоидально меняющегося сигнала
Задания в виде ступенчато нарастающего сигнала
8. Сделать выводы по работе
4. Требования к оформлению домашнего задания
Отчет оформляется на листах формата А4.
Отчет должен содержать:
Индивидуальное задание
Схему системы управления с ПИД-регулятором
График оптимизации коэффициентов регулятора
Оптимальные коэффициенты ПИД-регулятора
Результат моделирования СУ по отработке тестовых воздействий
Выводы по работе и письменную оценку результатов
Домашнее задание №2
1. Цели и задачи домашнего задания
Закрепление навыков синтеза нейрорегулятора.
2. Содержание домашнего задания
1. Выполнить синтез нейрорегулятора для заданного объекта управления (ОУ).
2. Провести моделирование схем управления с нейрорегулятором c задержанными сигналами по выходной координате ОУ, а также задержанными сигналами управления.
3. Провести анализ полученных результатов моделирования и по ним сделать выводы.
Задание
|
№ варианта |
Ф. И. О. студента |
Передаточная функция объекта управления |
Число скрытых слоев |
|
1 |
|
W(s)=20/(5s+1) |
1 |
|
2 |
|
W(s)=10/(40s+1) |
2 |
|
3 |
|
W(s)=3/(5s+1) |
1 |
|
4 |
|
W(s)=15/(40s+1) |
2 |
|
5 |
|
W(s)=3/(10s+1) |
1 |
|
6 |
|
W(s)=1/(3s+1) |
2 |
|
7 |
|
W(s)=13/(10s+1) |
1 |
|
8 |
|
W(s)=9/(4s+1) |
2 |
|
9 |
|
W(s)=21/(10s+1) |
1 |
|
10 |
|
W(s)=12/(30s+1) |
2 |
|
11 |
|
W(s)=5/(s(20s+1)) |
1 |
|
12 |
|
W(s)=11/(s(4s+1)) |
2 |
|
13 |
|
W(s)=18/(s(20s+1)) |
1 |
|
14 |
|
W(s)=20/(s(10s+1)) |
2 |
|
15 |
|
W(s)=40/(s(30s+1)) |
1 |
|
16 |
|
W(s)=17/(14s+1) |
2 |
|
17 |
|
W(s)=6/(8s+1) |
1 |
|
18 |
|
W(s)=1/(10s+1) |
2 |
|
19 |
|
W(s)=5/(14s+1) |
1 |
|
20 |
|
W(s)=4/(16s+1) |
2 |
|
21 |
|
W(s)=1/(2s+1) |
1 |
|
22 |
|
W(s)=3/(8s+1) |
2 |
|
23 |
|
W(s)=6/(5s+1) |
1 |
|
24 |
|
W(s)=8/(4s+1) |
2 |
|
25 |
|
W(s)=15/(7s+1) |
1 |
|
26 |
|
W(s)=3/(s(6s+1)) |
2 |
|
27 |
|
W(s)=2/(s(4s+1)) |
1 |
|
28 |
|
W(s)=8/(s(3s+1)) |
2 |
|
29 |
|
W(s)=2/(10s+1) |
1 |
|
30 |
|
W(s)=4/(15s+1)) |
2 |
|
31 |
|
W(s)=6/(s(6s+1)) |
1 |
|
32 |
|
W(s)=8/(s(4s+1)) |
2 |
|
33 |
|
W(s)=3/(s(12s+1)) |
1 |
|
34 |
|
W(s)=3/(16s+1) |
2 |
|
35 |
|
W(s)=10/(14s+1)) |
1 |