

3. Расчет частоты колебаний генератора импульсов
Определение периода колебаний генератора
Генератор прямоугольных импульсов преобразует подводимое к нему постоянное давление Р0 в импульсы заданной продолжительности τ1 следующие через равные интервалы τ0 с периодом Т.
Величины Т и τ1 определяются постоянной времени τ инерционного звена, т.е. величиной емкости V1, величиной проводимости дросселя α1 и величиной подпора Рп подаваемого в камеру Б.
Р0 = 0.1×10 6 Па Рп = 0.05×10 6 Па
Рср = Рп + 0.032 МПа Рср = 0.082 МПа
Ротп = Рп – 0.003 МПа Ротп = 0.047 МПа
где Р0 – давление питания ,
Рп – подпора,
Рср – давление срабатывания,
Ротп – давление отпирания.
Так как минимальный период колебаний Т должен быть равен времени цикла дозирования Тц, то из равенства Тц = Т находим:
Время нарастания давления в камере В:
 c
c
Время уменьшения давления от Рср до Ротп:
 c
c
Зная τ находим период колебаний Тг, который определяется сумой времен τ1 и τ0:
Т =
 +
+ =
= +
+ =
2.57 с
=
2.57 с
Найдем частоту колебаний:
f = 1 / T = 1 / 2.57= 0.389 1/c
4. Согласование параметров генератора с параметрами чид
Для
обеспечения выдачи ЧИД полного объема
доз необходимо, чтобы длительность
импульса
 генератора была несколько длительности
выдачи дозыtз.
генератора была несколько длительности
выдачи дозыtз.

 tз
+ 0.2 – Импульс генератора необходимо
укорачивать.
tз
+ 0.2 – Импульс генератора необходимо
укорачивать.

 0.593
+ 0.2
0.593
+ 0.2
Определяем количество стандартных пневмоёмкостей N:
V
= Tb α
α R
R θ
θ
где α
= 50 10-10
м
10-10
м с
с
R
= 29.3 м 2/с
2
 К
К
θ = 293 К
 м
3
м
3
N
= V/50 10-6
= 2.146
10-6
= 2.146
Принимаем N = 2
Уточняем V
V
= N
 50
50 10-6
= 1
10-6
= 1
 10-4
м3
10-4
м3
Уточняем α
 м
м с
с
По α определяем управляющий сигнал: Ру = 0. 06 МПа
Определяем диапазон частот аналаго-частотного преобразователя и строим его рабочую характеристику.
f = ( Ру )
Выбираем из графика α при Ру = 0.02 МПа
α = 16 * 10 -10 м*с
Найдем время переходного процесса

Время нарастания давления:
 c
c
Время уменьшения давления:
 c
c
Период колебаний:
Т =
 +
+
Т =
 +
+ =
2.57 с
=
2.57 с
Найдем частоту колебаний:
f = 1 / Т
f
= 1 /
 =
0.389 1/с
=
0.389 1/с
Построим график зависимости f = ( Py )
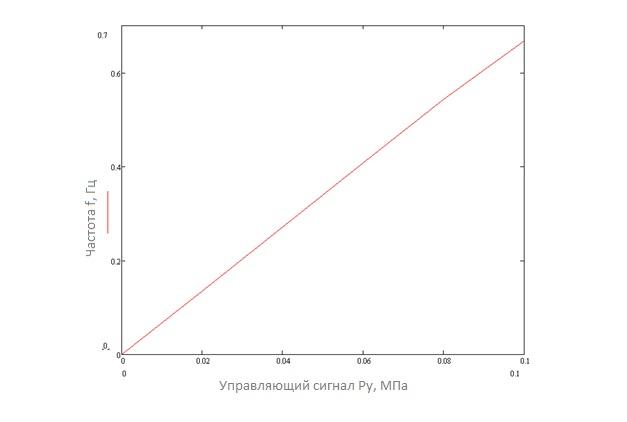
Рис. 3 Рабочая характеристика ПАЧП
Результаты расчета сводим в таблицу 1.
Таблица 1 – результаты
|
№ задания |
Исходные данные |
Расчетные данные | |||||||||||||
|
|
Тип усил. |
Vд |
dтр |
Lтр |
Pд |
Pз |
τз |
τоп |
tз |
tд |
Тц |
Tц новое |
fmax |
fmin | |
|
|
см3 |
мм |
м |
МПа |
МПа |
с |
с |
с |
с |
с |
с |
Гц |
Гц | ||
|
П2П.3 |
180 |
4 |
5 |
0.05 |
0.03 |
0.192 |
0.822 |
0.593 |
0.951 |
2.573 |
|
|
| ||
5. Описание конструктивного решения
После расчета статических и динамических характеристик и параметров технического средства, приведем принципиальную и монтажную схему пневматического аналого-частотного преобразователя и опишем его работу.
Принципиальная схема частотно-импульсного дозатора и генератора импульсов показана в Приложении 1, монтажная схема – в Приложении 2.
Пневматический аналого-частотный преобразователь работает следующим образом. В элементы 2,3 подается давление подпора Рп, давление питания Р0 – в элементы 1,2,4 и сигнал управления Ру в элемент 1. В начальный момент времени t1, под действием давления подпора Рп в камере В элемента 2, подвижный мембранный блок опускается вниз, и открывается верхнее сопло в камере Г, через которое питания давлением Р0 поступает на выход генератора, где сигнал Рвых становится равным 1. Сигнал Рвых поступает также на управляемый дроссель 1 в камеру А . При этом в камеру Б подан управляющий сигнал Ру. Так как дроссель с прямой проводимостью, то при повышении давления Ру сопротивление Rупр уменьшается. Мембранный блок управляемого дросселя 1 при этом начинает двигаться вверх, и через сопло в камере А начинает заполнять емкость V1 и расти давление в камере Б элемента 2. В момент, когда Рб2 = Рср реле 2 срабатывает, мембранный блок поднимается вверх, сопло в камере А открывается, а в камере Г закрывается. На выходе генератора 2 сигнал равен 0, при этом начинает опорожняться камера Б и емкость V1 через камеру А элемента 2, связанную с атмосферой. Рб2 уменьшается до Ротп, и реле отпускает.
При появлении импульса Рвых на входе генератора 2, на выходе импульсатора 3 появляется Рвых. В камере Б реле 3 начинает расти давление. Когда Рб1 = Рср реле 2 срабатывает и мембранный блок перебросится вверх, Рвых через камеру А реле 3 сбросится в атмосферу, при этом импульс Рвых будет укорочен. Когда Рвых = 0, то Рб1 начнет падать и при Рб1 = Ротп реле импульсатора отпускает. Давление Рвых импульсатора 3 поступает на вход усилителя мощности 4 релейного типа. На входе усилителя 4 формируется сигнал Ротп, который поступает в камеру мембранного исполнительного механизма 5, отделенную мембраной 6 от другой камеры 7, в которой находится дозируемая жидкость, поступающая в нее из емкости заполнения 8. Жидкость под действием сигнала Рвых с момента, когда Ротп ≥ Рп вытесняется мембраной 6 через выходной неуправляемый клапан 9 в емкость 10 с давлением Рв, при этом давление в камере 5 возрастает от Рв до Р0.