

Санкт-Петербургский Государственный Технологический Институт (Технический Университет)
Кафедра автоматизации процессов химической промышленности
Факультет: 4
Курс: 4
Группа: 4892
Учебная дисциплина: Системы комплексной механизации
КУРСОВОЙ ПРОЕКТ
Тема: Расчет частотно-импульсного дозатора с пневматическим управлением
Руководитель: Соколов М.В.
Студент: Максимов А.Ю.
Санкт-Петербург
2012
Задание
Вариант №13
Объем дозы – VД = 50 см3
Тип усилителя – РУП.1М
Диаметр трассы – dтр = 4 мм
Длина трассы – Lтр = 100 м
PД = 0,05 Мпа
P3 = 0,04 Мпа
Проводимость дросселя – прямая
Содержание
Введение……………………………………………………………………………
Описание структурной и принципиальной схем………………………….
Расчет динамических характеристик канала управления дозатором…….
Расчет частоты колебаний генератора импульсов………………………
Согласование параметров генератора с параметрами ЧИД………………
Описание конструктивного решения………………………………………
Выводы по работе…………………………………………………………...
Список литературы…………………………………………………………………
Приложения………………………………………………………………………...
Введение
При повышенных требованиях к точности регулирования среднего расхода жидкости вместо систем автоматического регулирования, включающих регуляторы и стандартные исполнительные устройства типа регулирующие клапаны, находят применение системы частотно-импульсного дозирования ЧИД, в состав которых входят аналого-частотный преобразователь АЧП и объемный дозатор Д. Дозатор, в свою очередь, состоит из мерной емкости МЕ, привода П и клапанов К, которые могут иметь как электрическое так и пневматическое управление. В последнем случае требуется преобразование выходного сигнала управляющего устройства Ру, представленного в аналоговой форме, в последовательность низкочастотных пневматических импульсов с помощью пневматического аналого-цифрового преобразователя ПАЧП. Структурная схема системы частотно-импульсного дозирования, включающая ПАЧП и Д, приведена на рисунке 1.
1. Описание структурной и принципиальной схемы
Регулирующее воздействие от управляющего устройства в виде унифицированного пневматического сигнала Ру=(0.02-0.1) МПа подается на вход управляемого генератора импульсов УГИ пневматического аналого-частотного преобразователя ПАЧП, где преобразуется в частоту f пневматических импульсов. Необходимая длительность импульсов УГИ формируется импульсатором ИМП, усиливается усилителем мощности УМ и по импульсной трассе ИТ передается на дозатор Д. Дозатор преобразует импульсы командного давления Рк в фиксированные объемы доз.
Диапазон частот ПАЧП определяется регламентом технологического процесса и свойствами объекта управления и обычно лежит в диапазоне от 1 до 0.01 Гц.
Производительность Q дозатора определяется из выражения:
Q=k V f,
где f – частота управляющих импульсов, V – объем дозы, k – периодичность дозатора (k=1 для однополупериодного дозатора и k=2 для двухполупериодного дозатора).
Период следования управляющих импульсов T=1/f должен удовлетворять условию:
T tвд
+tзд,
tвд
+tзд,
где tд – время выдачи дозы, tз – время заполнения мерной емкости дозатора.
При производительности дозатора выше 10 дм3/ч на выходе ПАЧП устанавливается усилитель мощности.
Время выдачи каждой дозы, определяемое параметрами ЧИД, должно быть меньше длительности командных импульсов Рк, формируемых ПАЧП.
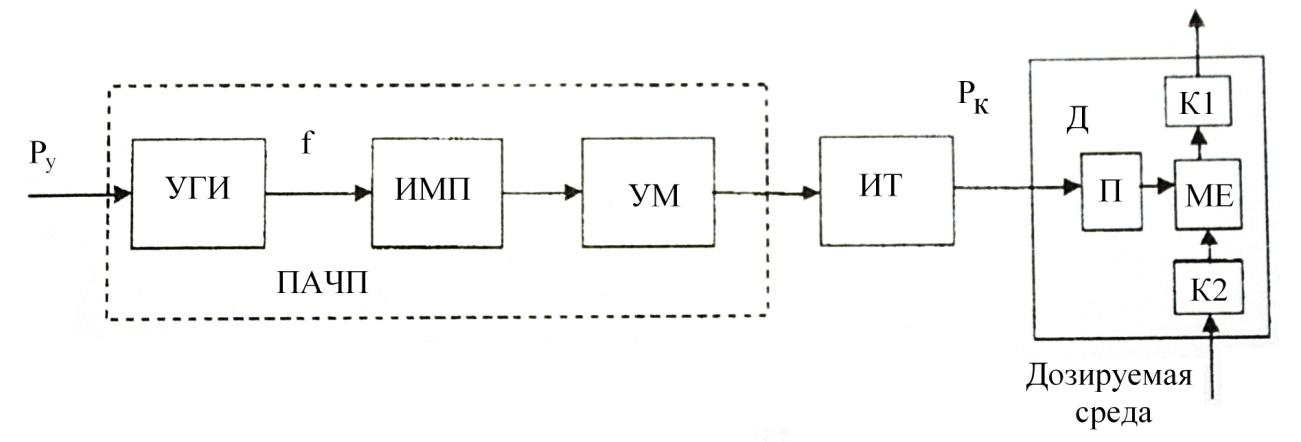
Рис.1 Структурная схема ЧИД
В качестве ПАЧП может применяться простейший управляемый генератор импульсов
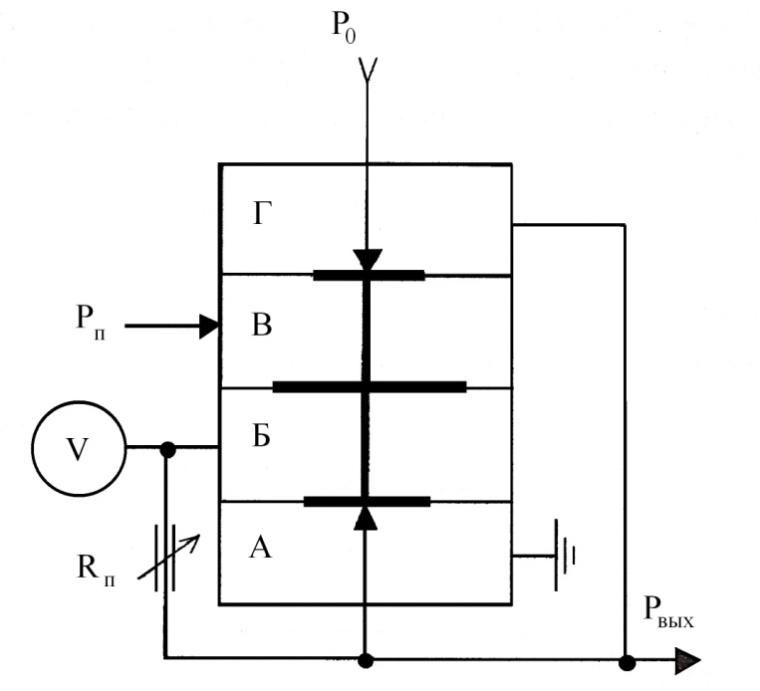
Рис. 2 Принципиальная схема простейшего генератора импульсов
Простейший генератор пневматических импульсов может быть построен на основе мембранного пневмореле П1Р.1 системы УСЭППА и апериодического звена, состоящего из переменного дросселя Rп и пневмоемкости V, включенного в линию обратной связи реле. Принципиальная схема генератора представлена на рисунке 2.
Работает генератор следующим образом. В пневмокамеру В реле подается давление подпора Рп. В начальный момент времени, под действием давления подпора в камере В, подвижный мембранный блок реле опускается вниз при этом закрывается сопло в камере А и открывается сопло в камере Г, через которое воздух питания давлением Ро поступает на выход генератора, где сигнал Рвых становится равным логической 1. Сигнал Рвых поступает на вход апериодического звена и в камере Б давление начинает возрастать. Далее, когда давление в камере Б Рб=Рср реле срабатывает, мембранный блок поднимается вверх, сопло в камере А открывается, а в камере Г закрывается. На выходе генератора сигнал становится равным логическому 0, при этом через камеру А начинает опорожняться камера Б и емкость V. Давление Рб уменьшается и при Рб=Ротп реле отпускает. Мембранный блок вновь опускается вниз. Ввиду того, что время опорожнения пневмоемкости всегда несколько больше времени ее наполнения, длительность паузы tп всегда несколько больше длительности импульса tим.