

5.2.1. Зависимость кинетического момента от выбора опорной точки. Кинетический момент твердого тела. Тензор инерции.
Хотя закон баланса кинетического момента сформулирован в инерциальной системе отсчета, сам кинетический момент может вычисляться в любой системе отсчета.
Рассмотрим любое (не обязательно твердое) тело и две произвольные, может быть подвижные, точки M и N.
Заменив
 =
= ,
немедленно получим
,
немедленно получим

или,
вспоминая определение количества
движения

 ,
,
 (5.14)
(5.14)
Рассмотрим движение твердого тела в любой (необязательно инерциальной) системе отсчета. Найдем кинетический момент относительно какой-либо точки В, принадлежащей телу (т.е. движущейся вместе с телом).
Подставим
в определение (5.12)
 основную
формулу кинематики твердого тела
основную
формулу кинематики твердого тела
 , взяв за полюс точку В:
, взяв за полюс точку В:
 .
.
Вспоминая
определение центра масс
 ,
первое
слагаемое запишем в виде
,
первое
слагаемое запишем в виде
 .
.
Во втором слагаемом раскроем двойное векторное произведение:
 .
.
Независящий
от переменных интегрирования вектор
угловой скорости
 вынесем из интеграла со знаком скалярного
умножения, представив
вынесем из интеграла со знаком скалярного
умножения, представив ,
где, напомним,
,
где, напомним, единичный
тензор, представимый в ортонормированном
базисе в виде
единичный
тензор, представимый в ортонормированном
базисе в виде .Тогда
.Тогда
 ,
,
Описывающий распределение массы вокруг точки В интеграл называется тензором инерции тела в точке В (или относительно точки В):
 (5.15)
(5.15)
Таким образом, кинетический момент твердого тела относительно принадлежащей ему точки, называемый собственным кинетическим моментом, имеет вид
 .
(5.16)
.
(5.16)
Формула упрощается, если в качестве полюса В выбрать центр масс:
тогда
 и
и ,
(5.17)
,
(5.17)
где
тензор инерции тела относительно центра
масс
 называетсяцентральным.
называетсяцентральным.
Если тело вращается вокруг неподвижной точки В, то
 .
(5.18)
.
(5.18)
Теперь, если нам нужно найти кинетический момент относительно какой-либо точки, например, относительно неподвижной точки А, достаточно воспользоваться формулой (5.14)
 .
(5.19)
.
(5.19)
5.2.2. Постоянный тензор инерции. Осевые и центробежные моменты инерции. Вычисление моментов инерции относительно произвольных осей.
Из
определения тензора инерции
 ,
вычисляемого в актуальном положении
твердого тела, ясно, что тензор инерции
зависит от времени. Разложим вектор
,
вычисляемого в актуальном положении
твердого тела, ясно, что тензор инерции
зависит от времени. Разложим вектор
 и единичный тензор по базису
и единичный тензор по базису ,
жестко связанному с телом:
,
жестко связанному с телом: .
.
Тогда
тензор инерции примет вид
 ,
где координаты
,
где координаты постоянные,a
переменные
постоянные,a
переменные
 и
и это повернутые вместе с телом постоянные
векторы
это повернутые вместе с телом постоянные
векторы и
и в
отсчетном ( например, приt=0)
положении. Таким образом,
в
отсчетном ( например, приt=0)
положении. Таким образом,
 это повернутый вместе с телом («вмороженный»
в тело) постоянный тензор инерции
это повернутый вместе с телом («вмороженный»
в тело) постоянный тензор инерции
 .
(5.20)
.
(5.20)
Последнее предложение с помощью тензора поворота «переводится» в формулу
 .
.

Далее
мы будем говорить о постоянном тензоре
 ,
координаты которого называютсямоментами
инерции.
,
координаты которого называютсямоментами
инерции.
Из
(5.20) ясно, что тензор инерции симметричный
 ,
т.е.
,
т.е. .
.
Формально
координаты
 тензора
в ортонормированном базисе вычисляются
с помощью скалярного умножения тензора
слева на
тензора
в ортонормированном базисе вычисляются
с помощью скалярного умножения тензора
слева на ,
а справа на
,
а справа на :
:
 .
(5.21)
.
(5.21)
Из (5.20) имеем:
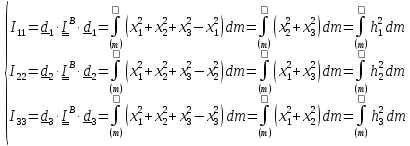 , (5.22)
, (5.22)
где
 квадрат
расстояния от элемента
квадрат
расстояния от элемента до «К»- ой оси,
до «К»- ой оси,
 (5.23)
(5.23)
Моменты инерции (5.22) называются осевыми, а (5.23) - центробежными.
Из (5.22) следуют своеобразные «правила треугольника»

Например,
 ,
,
причем
ясно, что равенство возможно только в
тех случаях, когда у всех точек тела
координата
 ;
например, если тело – бесконечно тонкий
стержень или бесконечно тонкая пластина.
;
например, если тело – бесконечно тонкий
стержень или бесконечно тонкая пластина.