

2.3 Описание алгоритма модуль внутреннего ориентирования снимков
Особенностью обработки снимков ТК-350 является то, что снимки сканируются не целиком, а по частям. Программа Mftec рассчитана на обработку стереопар, отсканированных по четвертям, таким образом, чтобы в пределах каждой четверти отображался центральный крест, как показано на рисунке 9.

Рисунок 9 – Сканируемая часть снимка
Вполне очевидно, что при обработке части изображения снимка ТК-350 нельзя выполнить его внутреннее ориентирование по координатным меткам. Поэтому для внутреннего ориентирования части снимка ТК-350 используется впечатанная сетка крестов, центральный и боковые кресты которой имеют больший размер по сравнению с остальными (рисунок 9). Кроме того, необходимо иметь файл с калибровочными координатами крестов сетки.
В дальнейшем при описании модулей под термином «снимок» будем понимать четверть всего изображения (как показано на рисунке 9).
В модуле внутреннего ориентирования снимков программы Mftec используется автоматическое разбиение снимка на зоны. Всё поле снимка разбивается на зоны, границы которых определяют четыре соседних креста сетки (рисунок 10).

Рисунок 10 – Зона на снимке ТК-350
Для каждой зоны определяются коэффициенты полиномов с целью устранения систематических ошибок в координатах точек снимков. Кроме того, данные коэффициенты позволяют выполнить переход от системы координат цифрового изображения к плоской системе координат точек снимка, что и является целью внутреннего ориентирования снимков.
Для выполнения разбиения снимка на зоны необходимо установить соответствие «центрального», «горизонтального» и «вертикального» калибровочных крестов и их изображений на снимке. Сначала необходимо на снимке найти изображение центрального креста, нажать кнопку «Central», указать соответствующее положение данного креста на калибровочной сетке (рисунок 11) и выполнить измерение координат креста на снимке в системе координат цифрового изображения.

Рисунок 11 – Калибровочная сетка
Аналогичные операции выполняются для «горизонтального» и «вертикального» крестов, при этом используются кнопки «Horizontal» и «Vertical». Основное требование к данной операции – это обеспечение чёткого соответствия указанных крестов снимка и калибровочной сетки. Каждый из выбранных крестов подписывается соответствующим образом, что позволяет выявить ошибку выбора креста (рисунок 12). Например, если оператор при измерении координат горизонтального креста забыл нажать кнопку «Horizontal», то будет дано предыдущее назначение (центральный или вертикальный) и соответствующая подпись.

Рисунок 12 – Подпись «вертикального» креста
Прежде чем выполнить автоматическое разбиение снимка ТК-350 на зоны, т.е. поиск и измерение координат остальных крестов, необходимо выбрать вид используемого полинома. В программе предусмотрены два варианта: полиномы вида
 , (3)
, (3)
и полиномы вида
 (4)
(4)
где xphoto, yphoto – плоские координаты точки в системе координат снимка;
ai, bi – коэффициенты полиномов;
ximg, yimg – координаты точки в системе координат цифрового изображения.
Для использования второго вида полиномов (4) необходимо установить флажок «Bi-linears polynoms». При отсутствии данной установки используется первый вид полиномов (3).
Для выполнения автоматического разбиения снимка на зоны необходимо нажать кнопку «Find Cross». В основе автоматического поиска крестов положен метод корреляции. Положение всех найденных крестов на снимке маркируется. Для удобства контроля работы коррелятора в окне навигатора кресты показываются зелёным и красным цветом. Зелёным – правильно отождествлённые кресты, красным – сомнительно отождествлённые (рисунок 13).

1 – маркировка отождествлённых крестов, 2 – окно навигатора и границы зон
Рисунок 13 – Автоматическое разбиение снимка ТК-350 на зоны
Сомнительно отождествлённые кресты можно переизмерить в ручном режиме. Для этого необходимо найти нужный крест, удалить результаты его автоматического поиска и маркировки и измерить координаты креста заново. Процесс измерения координат точек снимка подробно описано в разделе 2.2.
После автоматического определения положения границ всех зон и их корректировки вручную, выполняется сохранение результатов автоматического разбиения на зоны («Save results») и измерений координат крестов («Save measures»). Вычисление всех коэффициентов происходит только после нажатия кнопки «Save results». При сохранении результатов формируется несколько файлов со служебной информацией. Для удобства дальнейшего использования результатов внутреннего ориентирования снимков создаётся файл-проект, осуществляющий связь с остальными файлами. Для загрузки выполненных ранее измерений координат крестов служит кнопка(«Load measures»).
В программе также предусмотрена возможность вычисления коэффициентов полиномов для одной зоны, границы которой задаются пользователем. Для этого необходимо установить флажок «Single zone» и измерить координаты четырёх крестов, являющихся границами зоны. После нажатия кнопки «Save results» будут вычисляться и сохраняться коэффициенты полиномов. Следует отметить, что дальнейшая работа (измерение координат точек изображения для взаимного ориентирования снимков и внешнего ориентирования модели и т.д.) с участками снимка, не принадлежащими указанной зоне, невозможна, т.к. для них не определены коэффициенты полиномов, а, следовательно, невозможен переход в плоскую систему координат точек снимка.
При использовании автоматического разделения снимка на зоны «вертикальный» и «горизонтальный» кресты, которые служат границами области разбиения, следует выбирать максимально приближенными к краю снимка. Это позволит более точно определить угол разворота снимка, существовавший при сканировании, а, следовательно, точнее найти положение крестов.
Для дальнейшего перехода от системы координат цифрового изображения к плоской системе координат точек снимка (для любых измеренных координат точек) необходимо определить в какую зону попадает точка, а затем перевычислить координаты этой точки в систему координат снимка по формулам (3) или (4).
2.4 Описание алгоритма модуля взаимного ориентирования снимков
2.4.1 Элементы взаимного ориентирования снимков
Модуль «MfRel» предназначен для выполнения взаимного ориентирования пары снимков ТК-350, т.е. определения такого их положения, в котором они находились относительно друг друга при фотографировании. Для этого необходимо найти значения величин, определяющих взаимное положение снимков во время фотографирования. Такие величины называют элементами взаимного ориентирования снимков [30].
Различают две основные системы элементов взаимного ориентирования: базисную и линейно-угловую. В программе Mftec используется базисная система. За начало координат в ней принят центр проекции левого снимка, ось Х совмещена с базисом фотографирования, а ось Z расположена в главной базисной плоскости левого снимка (рисунок 14).
Элементами взаимного ориентирования в базисной системе являются [30]:
-
 – продольный угол
наклона левого снимка, лежащий в главной
базисной плоскости левого снимка между
перпендикуляром к базису фотографирования
и главным лучом левой связки;
– продольный угол
наклона левого снимка, лежащий в главной
базисной плоскости левого снимка между
перпендикуляром к базису фотографирования
и главным лучом левой связки; -
 – угол поворота
левого снимка, лежащий между осью y1
и следом плоскости S1o1Y1;
– угол поворота
левого снимка, лежащий между осью y1
и следом плоскости S1o1Y1; -
 – продольный угол
наклона правого снимка, лежащий в
главной базисной плоскости левого
снимка между перпендикуляром к базису
фотографирования и проекцией главного
луча правой связки на плоскость S1X2Z2;
– продольный угол
наклона правого снимка, лежащий в
главной базисной плоскости левого
снимка между перпендикуляром к базису
фотографирования и проекцией главного
луча правой связки на плоскость S1X2Z2; -
 – поперечный угол
наклона правого снимка, лежащий между
проекцией главного луча правой связки
на базисную плоскость левого снимка и
главным лучом;
– поперечный угол
наклона правого снимка, лежащий между
проекцией главного луча правой связки
на базисную плоскость левого снимка и
главным лучом; -
 – угол поворота
правого снимка, лежащий между осью y2
и следом плоскости S2o2Y2.
– угол поворота
правого снимка, лежащий между осью y2
и следом плоскости S2o2Y2.
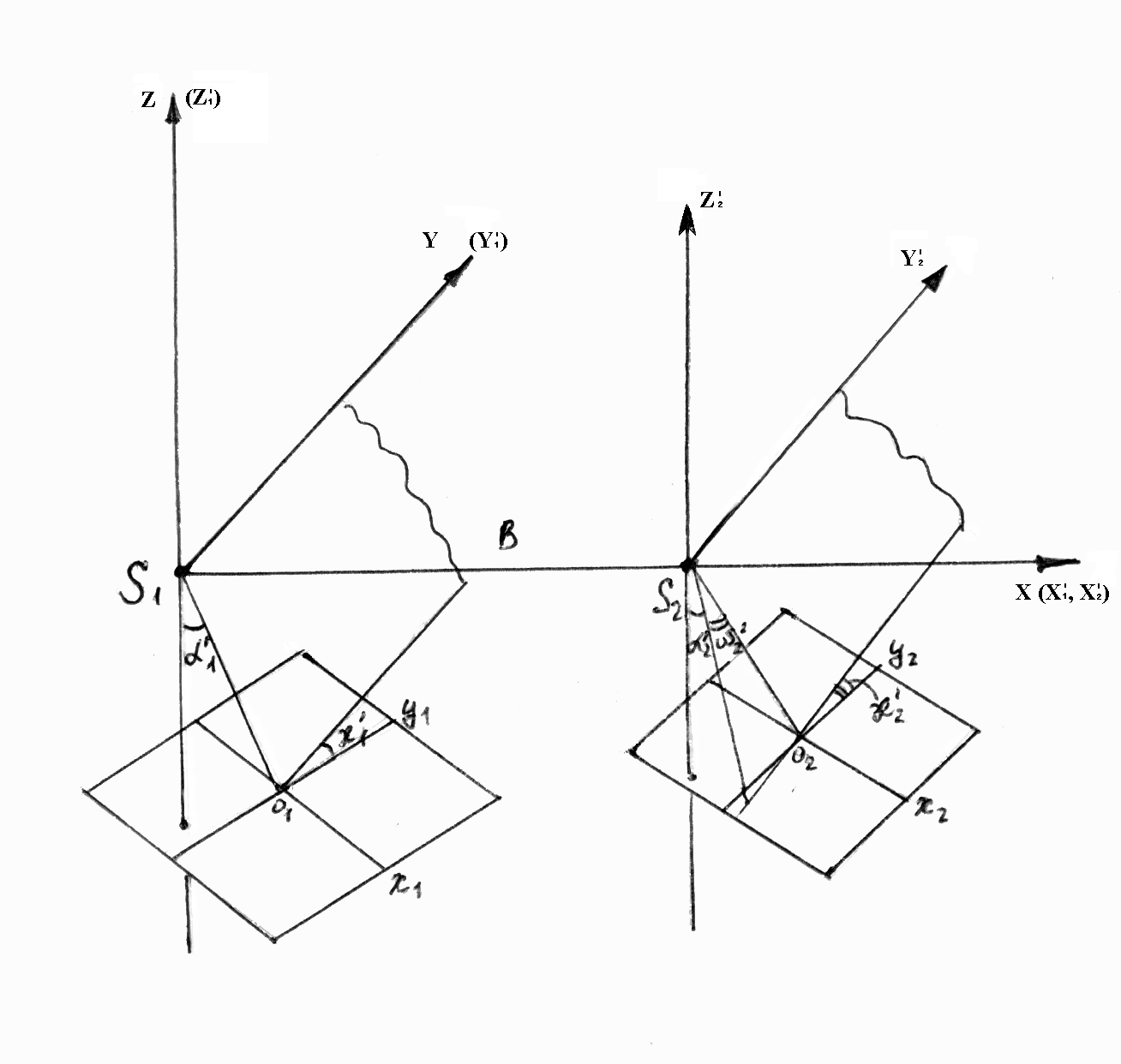
X, Y, Z – оси фотограмметрической системы координат; X1, Y1, Z1 (X2, Y2, Z2) – оси пространственной системы координат левого (правого) снимка; В – базис фотографирования; x1, y1, x2, y2 – оси плоских систем координат левого и правого снимков соответственно; о1, о2 – главные точки левого и правого снимков
Рисунок 14 – Базисная система элементов взаимного ориентирования
Взаимное ориентирование основано на применении условия пересечения пары соответствующих лучей. В векторной форме это условие записывается как условие компланарности трёх векторов:
![]() (5)
(5)
где
![]() – векторы,
определяющие положение центра проекции
правого
– векторы,
определяющие положение центра проекции
правого
снимка и пары соответственных точек относительно центров проекции левого и правого снимков.
В координатной форме, применительно к базисной системе взаимного ориентирования, условие (5) можно записать в виде:
![]() (6)
(6)
где Y1’ Z1’ Y2’ Z2’ пространственные координаты соответствующих точек на
левом и правом снимках.
Элементы взаимного ориентирования определяются решением системы уравнений вида (6) записанных для 5 и более точек. Если число точек больше пяти, то уравнения решают по способу наименьших квадратов [30]. Поскольку уравнения (6) являются нелинейными по отношению к неизвестным, в программе Mftec они решаются итерационным методом.