

14. Эппт. Номинальный режим. Допустимые значения координат
Рассматривая свойства и режимы электроприводов постоянного тока, мы интересовались лишь общими соотношениями и главными соразмерностями, не обращая внимания на реализуемость тех или иных режимов, на технические ограничения, играющие решающую роль в любых практических задачах.
Далее мы рассмотрим кратко определение допустимых значений основных координат - тока, момента, скорости.
В основе всех этих оценок лежат номинальные данные двигателя, указываемые обычно на заводском шильдике или в паспорте двигателя.
К таким данным для
двигателей, предназначенных для работы
в продолжительном режиме, относятся
номинальные напряжение Uн,
В; ток Iн,
А; мощность на валу Рн,
кВт; частота вращения nн,
об/мин (![]() 1/c);
КПДн;
напряжение возбуждения Uвн,
В; ток возбуждения Iвн
(для двигателей независимого возбуждения),
момент инерции Jн,
кгм2,
исполнение двигателя IP. Другие сведения
обычно в паспорте не приводятся.
1/c);
КПДн;
напряжение возбуждения Uвн,
В; ток возбуждения Iвн
(для двигателей независимого возбуждения),
момент инерции Jн,
кгм2,
исполнение двигателя IP. Другие сведения
обычно в паспорте не приводятся.
Номинальные данные
соответствуют одной точке в плоскости
![]() -М
с допустимыми и благоприятными значениями
всех основных величин в оговоренном (в
нашем случае, продолжительном) режиме,
хотя в действительности электропривод
работает в любых точках и совсем не при
номинальных данных.
-М
с допустимыми и благоприятными значениями
всех основных величин в оговоренном (в
нашем случае, продолжительном) режиме,
хотя в действительности электропривод
работает в любых точках и совсем не при
номинальных данных.
Номинальные данные используются для построения основных - естественных - характеристик двигателя, служащих, как отмечалось ранее, основой для получения искусственных характеристик при регулировании координат.
Рассмотрим теперь допустимые (безопасные) пределы изменения основных координат.
Напряжение нормально ограничивается номинальным значением. В реверсивных электроприводах допускается на время реверса двукратное превышение номинального значения.
Магнитный поток также ограничен номинальной величиной, поскольку при ее длительном превышении ток возбуждения, превышающий номинальный, может вызвать недопустимый перегрев обмоток. Допускается кратковременное (до минуты) двукратное увеличение тока возбуждения.
Скорость по условиям механической прочности нормально ограничена номинальным значением с небольшим 20-30% допустимым превышением; специальные двигатели, предназначенные для работы с ослабленным полем, допускают 3-4 -кратное превышение номинальной скорости.
Ток якоря - координата, определяющая надежность работы электропривода. В продолжительном режиме ток на всех скоростях не должен превышать номинального значения при независимом охлаждении двигателя - сплошные линии со штриховкой на рис. 3.12. В двигателях, охлаждаемых собственным вентилятором, в продолжительном режиме необходимо снижать ток на 30-40% при низких скоростях - пунктир на рис. 3.12 во избежание недопустимого перегрева. Кратковременные (секунды) перегрузки по току ограничиваются условиями коммутации машины; допустимые перегрузки обычно не превышают (2-3)Iн - линии с двойной штриховкой на рис. 3.12. Из изложенного следует недопустимость пуска электропривода постоянного тока (кроме микроприводов) прямым включением на номинальное напряжение.
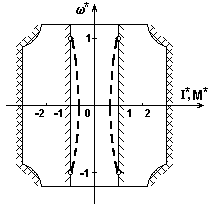
Рис. 3.12. Область допустимых нагрузок электропривода постоянного тока
Момент при полном потоке имеет те же ограничения, что и ток якоря.
Таким образом,
зона допустимых значений
![]() иМ
сравнительно невелика, и рис. 3.12 даёт о
ней некоторое представление: внутренняя
область относится к продолжительному
режиму, внешняя - к кратковременным
(секунды) перегрузкам.
иМ
сравнительно невелика, и рис. 3.12 даёт о
ней некоторое представление: внутренняя
область относится к продолжительному
режиму, внешняя - к кратковременным
(секунды) перегрузкам.
16. ЭППТ. Регулирование координат в разомкнутых структурах. Реостатное регулирование в схеме ДПТ независимого возбуждения: схема, основные соотношения, механические и электромеханические характеристики. Оценка способа
Реостатное регулирование - самый простой и самый неблагоприятный способ регулирования скорости и (или) момента. В якорную цепь последовательно, если питание осуществляется от источника напряжения (рис. 3.13,а), включаются дополнительные резисторы.

а)

б)
Рис. 3.13. Схема (а) и характеристики (б) при реостатном регулировании двигателя независимого возбуждения
В соответствии с (3.4) и (3.5) скорость идеального холостого хода при Uн и Фн и включении Rд не изменится:
![]()
а наклон характеристик
![]() будет увеличиваться пропорциональноR = Rя+Rд.
Воспользовавшись (3.15), получим при
I*=M*=1
будет увеличиваться пропорциональноR = Rя+Rд.
Воспользовавшись (3.15), получим при
I*=M*=1
* = R*, (3.16)
где* = 1 - *,
![]()
Соотношение (3.16) позволяет легко решать прямую задачу - построить характеристики, если задано R, и обратную - найти R и Rд для заданной характеристики. Так, на рис. 3.13,б
![]()
![]()
![]()
![]()
17. ЭППТ. Регулирование координат в разомкнутых структурах. Реостатное регулирование в схеме ДПТ последовательного возбуждения: схема, основные соотношения, механические и электромеханические характеристики. Оценка способа
В электроприводе с двигателем последовательного возбуждения при U=Uн (рис. 3.14,а) и известной естественной характеристике
![]()
можно использовать уравнение искусственных характеристик при реостатном регулировании
![]()
и получить соотношение для расчета и для любого тока:
![]() (3.17)
(3.17)

а)

б)
Рис. 3.14. Схема (а) и характеристики (б) при реостатном регулировании двигателя последовательного возбуждения
Механическая характеристика может быть построена по известной зависимости М(I). Примерный вид механических характеристик при реостатном регулировании показан на рис. 3.14,б.
18.ЭППТ. Регулирование координат в разомкнутых структурах. Реостатное регулирование при питании якоря ДПТ от источника тока: схема, основные соотношения, механические и электромеханические характеристики. Оценка способа
При питании якорной цепи от источника тока (I=const) реостатное регулирование осуществляется включением Rд параллельно якорю - рис. 3.15,а; характеристики при этом существенно изменяются, появляется возможность регулировать как момент, так и скорость.


а) б)
Рис. 3.15. Схема (а) и характеристики (б) при реостатном регулировании в системе источник тока – двигатель
Для схемы на рис. 3.15,а реостатные характеристики можно получить из основных уравнений (3.1) и (3.2)
М* = I*яФ*
и
Е* = Ф**,
дополненных уравнениями для электрических цепей:
I*= I*я + I*R
E* = IR* Rд* - Iя* Rя*.
Здесь мы использовали относительные величины, приняв за базовые, как и раньше, Uн, Iн, Фн, н.
Совместное решение уравнений дает:
![]() (3.18)
(3.18)
Наличие контура якорь - дополнительный резистор, в котором реализуется действие ЭДС вращения Е, приводит к характеристикам, аналогичным традиционным, получаемым при питании якоря от источника напряжения. Отличие, однако состоит в том, что скорость идеального холостого хода
![]()
теперь зависит от сопротивления дополнительного резистора Rд*, а момент короткого замыкания
![]()
при малых Rя*, практически не зависит от Rд*.
Таким образом, в системе источник тока - двигатель с шунтируюшим резистором общей точкой механических характеристик при Ф = const и Rд = var является точка короткого замыкания, тогда как в системе источник напряжения - двигатель при Rд = var - точка идеального холостого хода. Примеры механических характеристик при изменении Rд (Ф = Фн) приведены на рис. 3.15,б. Напряжение на выходе источника тока изменяется при Ф = const практически пропорционально скорости:
![]() .
.
Из графиков на рис. 3.15,б следует, что реостатное регулирование скорости в системе источник тока - двигатель более благоприятно при малых скоростях как с точки зрения жесткости характеристик - она тем выше, чем меньше скорость - так и с точки зрения потерь - они уменьшаются с уменьшением скорости.
Итак, если воспользоваться показателями, изложенными в гл.2, то получим следующие оценки реостатного способа регулирования.
1. Регулирование
однозонное - вниз от основной скорости,
так как вводя Rд,
мы увеличиваем
![]() ,
и все искусственные характеристики в
1 квадранте располагаются ниже
естественной.
,
и все искусственные характеристики в
1 квадранте располагаются ниже
естественной.
2. Диапазон реостатного регулирования невелик (2-2,5):1
3. Реостатное регулирование – ступенчатое.
4. При принятых ранее допущениях (внешний обдув) можно считать, что Мдоп = Мн на любой реостатной характеристике, так как магнитный поток неизменен.
5. Потери энергии при регулировании значительны.
6. Капитальные затраты на реостатное регулирование сравнительно невелики: к двигателю добавляется лишь недорогой резистор и коммутационная аппаратура.
Оценивая реостатное регулирование по всем показателям, нетрудно видеть, что это весьма несовершенный способ регулирования.