

3.4. Уравнение движения автомобиля
Сила тяги автомобиля (Рр), полученная с помощью двигателя, расходуется на преодоление сопротивлений движению и придание автомобилю ускорения. Учитывая это, составим из условия равенства внешних и внутренних сил, действующих на автомобиль, уравнение движения автомобиля:
Рр = Рf Pi + Pw Pj, (3.17)
где Pf, Pi, Pw, Pj – описанные ранее виды сопротивлений движению автомобиля.
Сформируем в левой части члены уравнения, зависящие в основном от скорости движения и характеризующие динамические качества автомобиля. В правой части оставим составляющие, описывающие дорожные условия (дорожные сопротивления). Подставив значения сопротивлений, определенные ранее (п. 3.3), получим уравнение:
Рр
=
![]() . (3.18)
. (3.18)
Академик Е.А. Чудаков предложил характеризовать тяговые (динамические) возможности автомобиля динамическим фактором – разницей между силой тяги на ведущих колесах и сопротивлением воздушной среды, отнесенной к единице веса автомобиля. После преобразования формулы (3.18) получим зависимость:
![]() . (3.19)
. (3.19)
Из
которой следует, что динамический
фактор –
это избыточная удельная сила тяги,
которая может быть использована на
преодоление дорожных сопротивлений
(![]() )
и придание автомобилю ускорения (j).
)
и придание автомобилю ускорения (j).
Сила тяги и сопротивление воздушной среды в процессе движения автомобиля не остаются постоянными, а изменяются с изменением скорости. Поэтому величина динамического фактора также изменяется в зависимости от скорости. График зависимости динамического фактора от скорости при полной нагрузке на автомобиль, по предложению академика Е.А. Чудакова, назвали динамической характеристикой (рис. 3.6).
Такие графики используются в России как основные при всех тяговых расчетах на автомобильных дорогах (определение максимальных продольных уклонов, преодолеваемых автомобилями; величины скорости, развиваемой автомобилями на подъемах и т.д.).
Возможность приложения максимальных тяговых усилий, которые характеризуют динамические характеристики, зависит от сцепления колеса автомобиля с покрытием, поэтому для проверки реализации тяговых возможностей автомобиля строят графики динамических характеристик по сцеплению (Dсц). Их определяют, исходя из того, что
Рр = Gсц·, (3.20)
тогда
![]() . (3.21)
. (3.21)
Совмещая графики динамических характеристик и графики динамических характеристик по сцеплению, определяют возможную скорость движения автомобиля в зависимости от сцепных качеств покрытия.
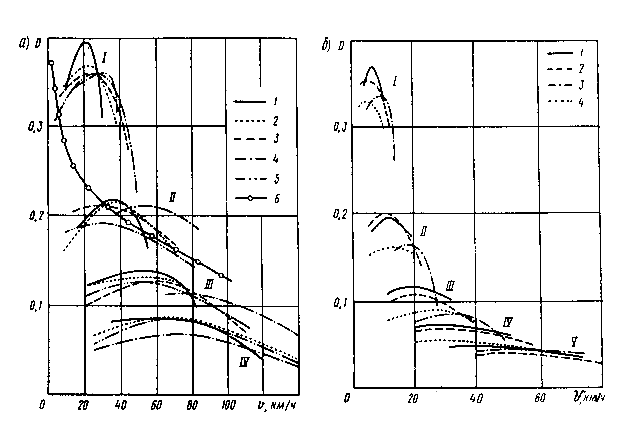
Рис. 3.6. Примеры графиков динамических характеристик автомобилей:
алегковых автомобилей различных марок (1, 2, 3, 4, 5, 6);б грузовых автомобилей различных марок (1, 2, 3, 4)
3.5. Торможение и тормозной путь автомобиля
В случае необходимости остановки автомобиля водитель пользуется торможением, которое может осуществляться следующими способами:
отключение сцепления и последующее торможение осуществляется тормозными колодками о тормозной барабан. Этот способ наиболее эффективен на сухих шероховатых покрытиях;
сцепление оставляется включенным на холостом ходу. После движения некоторое время в таком состоянии и снижения в результате этого скорости, начинается торможение тормозными колодками;
на затяжных спусках торможение может осуществляться двигателем путем последовательного переключения на пониженные передачи. В этом случае энергия гасится трением: поршней двигателя о стенки цилиндров, подшипников, коленчатого вала и т.д., оно возникает в результате того, что ведущие колеса вращают вал отключенного двигателя.
Для определения требований к элементам дорог необходимо знать тормозной путь автомобиля. Его определяют по первому способу торможения. Рассмотрим для этого уравнение движения автомобиля. При отключенном двигателе (Рр = 0) движущей силой будет выступать сила инерции. Тогда уравнение движения автомобиля будет иметь вид:
![]() , (3.22)
, (3.22)
где Рт – тормозная сила, величина которой определяется выражением:
![]() , (3.23)
, (3.23)
где
PT
– тормозная
сила; ![]() –
коэффициент тормозной силы, равный
отношению суммы тормозных сил, возникающих
на всех колесах, к весу автомобилей;
–
коэффициент тормозной силы, равный
отношению суммы тормозных сил, возникающих
на всех колесах, к весу автомобилей; ![]() -вес автомобиля.
-вес автомобиля.
Предельная
величина ![]() принимается равным коэффициенту
продольного сцепления ,
т.к. при большем тормозном усилии
начинается проскальзывание заторможенных
колес и эффект торможения снижается.
принимается равным коэффициенту
продольного сцепления ,
т.к. при большем тормозном усилии
начинается проскальзывание заторможенных
колес и эффект торможения снижается.
Путь,
пройденный автомобилем за период полного
торможения, определяют по формуле
равномерно замедленного движения: V
=
![]() , где
, где
![]() -
тормозной путь;V
– скорость
в начале торможения;
-
тормозной путь;V
– скорость
в начале торможения;
![]() -абсолютное
значение отрицательного ускорения при
торможении.
-абсолютное
значение отрицательного ускорения при
торможении.
Отсюда:
![]() . (3.24)
. (3.24)
Тогда после подстановки выражения (3.24) в уравнение (3.22) и некоторых преобразований получим зависимость, характеризующую тормозной путь (Sт)
Sт
=
![]() , (3.25)
, (3.25)
где V – скорость в начале торможения, м/сек.
При этом сделаны следующие допущения:
Рw принято равным 0, т.к. при резком снижении скорости величина сопротивления воздуха довольно мала и не оказывает существенного влияния на получаемые результаты;
1, что несколько упрощает расчеты и дает дополнительный запас с точки зрения обеспечения безопасности движения.
Следует иметь ввиду, что из-за неточности регулировки тормозов и неравномерности распределения тормозного усилия между колесами теоретическая величина пути торможения, определяемая зависимостью (3.25), практически реализуется очень редко. Поэтому по предложению проф. Д.П. Великанова в зависимость (3.25) вводится коэффициент эффективности торможения (kэ). Тогда
Sт
=
![]() . (3.26)
. (3.26)
По
данным многочисленных наблюдений
установлено, что для легковых автомобилей
![]() =
1,2, а для грузовых и автобусов
=
1,2, а для грузовых и автобусов![]() =
1,31,4.
=
1,31,4.
 При
расчетах элементов автомобильных дорог
для большей безопасности вводится
понятиерасчетного
тормозного пути (
При
расчетах элементов автомобильных дорог
для большей безопасности вводится
понятиерасчетного
тормозного пути (![]() ),
который определяется по схеме торможения
перед препятствием на дороге (рис. 3.7) и
описывается зависимостью (3.27).
),
который определяется по схеме торможения
перед препятствием на дороге (рис. 3.7) и
описывается зависимостью (3.27).
Рис. 3.7. Схема к определению расчетного тормозного пути
![]() , (3.27)
, (3.27)
где L1 – путь проходимый автомобилем за время реакции водителя; L2 = Sт – тормозной путь; Lз – расстояние запаса (зазор безопасности).
Время реакции водителя колеблется в пределах от одной до нескольких секунд в зависимости от большого числа факторов. Для расчетов по зависимости (3.27) время реакции водителя принимается равным 1с. Расстояние запаса принимается равным длине автомобиля (Lз = Lавт), тогда уравнение (3.27) будет иметь вид:
![]() . (3.28)
. (3.28)