

ТСАУ (часть 1)
.pdfмы; второе (со знаком минус) – T – для большинства систем равно нулю;
qi
третье – Ф – определяет силы сопротивления, приводящие к рассеянию меха-
qi
нической энергии в системе; четвертое – П – выражает потенциальные силы
qi
(силы тяжести, упругости и т. п.).
Кинетической энергией обладают тела, имеющие массу m, если совершают поступательное движение, и моментом инерции J, если совершают вращательное движение (либо оба движения одновременно – плоскопараллельное движение). В общем случае выражение для кинетической энергии системы имеет вид:
n |
1 |
|
m |
1 |
|
|
|
T |
miqi2 |
|
J j q2j , |
(17) |
|||
2 |
2 |
||||||
i 1 |
|
j 1 |
|
|
где mi, qi – масса поступательно движущегося элемента и его скорость;
Jj, q j – момент инерции вращательно движущегося элемента и его угловая
скорость.
В случае рассмотрения динамики малых колебаний в механической системе все силы тяжести, не создающие вращающего момента и которые можно определить путем решения задачи статики, для упрощения расчетов можно исключить. Тогда потенциальная энергия определяется только свойствами всех упругих элементов согласно выражению:
n |
1 |
|
|
|
|
П |
ci i2 |
, |
(18) |
||
2 |
|||||
i 1 |
|
|
|
где ci – жесткость произвольного упругого элемента;
i – деформация этого элемента, которую необходимо выразить через заданные обобщенные координаты.
Диссипативная функция системы определяется аналогичным образом для всех элементов, рассеивающих механическую энергию:
10
m |
1 |
|
|
|
Ф |
j 2j , |
(19) |
||
2 |
||||
j 1 |
|
|
где βj – коэффициент вязкого трения диссипативного элемента или эквивалентный ему в случае, если элемент рассеивает энергию за счет сухого трения или каким-либо другим образом;
j – скорость деформация этого элемента, которую также необходимо вы-
разить через скорости обобщенных координат.
Обозначение элементов, обладающих массой, и их связей в системе приведено на рис. 3.
m |
J |
|
m, J |
|
|
|
|
β |
с |
||
|
|
|
|
||
x |
φ |
φ |
x |
|
|
|
|
|
|
||
а |
б |
|
в |
г |
д |
Рис. 3. Обозначение элементов механической системы на расчетной схеме: тела, движущиеся поступательно (а), вращательно (б) и плоскопараллельно (в); диссипативная (г) и упругая (д) связь
Для определения обобщенной силы Fi необходимо записать выражение для возможной мощности через скорость обобщенной координаты qi , а также для суммы возможных мощностей всех активных сил, приложенных в различных точках системы, через скорости этих точек при условии что все скорости обобщенных координат равны нулю, кроме выбранной i-й координаты:
n |
|
Fi qi Fk k . |
(20) |
k1
Ввыражении (20) присутствуют скалярные произведения, вычисляемые в общем виде по формуле:
a b a b cos , |
(21) |
где a, b – модули векторов a и b;– угол между ними.
11

Далее для каждого уравнения необходимо с помощью кинематических преобразований выразить скорости всех точек через одну, например, через скорость самой обобщенной координаты qi , а затем сократить левую и правую части выражения (20) на эту скорость:
n |
|
Fi bk Fk , |
(22) |
k 1
здесь Fi и Fk – модули сил;
bk – некоторые числовые коэффициенты, полученные в процессе кинематических преобразований.
После определения всех составляющих уравнения Лагранжа 2-го рода для каждой обобщенной координаты в расчетной схеме механической системы или соотношений между падением напряжения на каждом из элементов и протекающим через него током в электрической схеме можно составить систему, содержащую однородные или неоднородные дифференциальные уравнения. Количество этих уравнений определяется числом степеней свободы механической системы или количеством токов в электрической цепи.
Полученные дифференциальные уравнения системы необходимо преобразовать в операторную форму, пользуясь прямым односторонним преобразованием Лапласа:
|
|
X (s) L x(t) x(t)e st dt, |
(23) |
0 |
|
где L{x(t)} – оператор Лапласа;
x(t) – оригинал сигнала (функция времени); X(s) – изображение сигнала по Лапласу.
При определении передаточной функции принимают нулевые начальные условия для системы уравнений. При этом нужно отметить следующие основные свойства преобразования Лапласа:
1) Y(s) = a X(s), если y(t) = a x(t) и a = const; 2) Y(s) = X(s) + Z(s), если y(t) = x(t) + z(t);
3) Y(s) = s X(s), если y(t) dx(t) (при нулевых начальных условиях); dt
4) Y(s) = 1/s X(s), если y(t) x(t)dt.
12
Для успешного решения задачи необходимо, чтобы число уравнений в системе равнялось числу неизвестных сигналов, включая искомые и промежуточные. При этом входной сигнал считается заданным и слагаемые, содержащие его, должные располагаться в правой части неоднородного уравнения.
Если динамика системы задана уравнением (1), то, преобразовав его по Лапласу, получим выражение в операторной форме:
a snY (s) a |
sn 1Y (s) ... a Y (s) b |
sm X (s) b |
sm 1X (s) ... b X (s), (24) |
||||
n |
n 1 |
0 |
m |
m 1 |
0 |
||
откуда можно выразить передаточную функцию в виде отношения двух полиномов:
W (s) |
Y (s) |
|
b sm b |
sm 1 |
... b |
|
|
||
|
m |
m 1 |
0 |
, |
(25) |
||||
X (s) |
a sn a |
sn 1 |
... a |
||||||
y/ x |
|
|
|
||||||
|
|
|
|
|
|
|
|
||
|
|
|
n |
n 1 |
|
0 |
|
|
|
где X(s) и Y(s) – изображения входного и выходного сигналов.
В случае, когда система содержит несколько неизвестных сигналов, необходимо решить эту систему в операторной форме (она будет содержать линейные алгебраические уравнения) для искомого сигнала, выразив его через входной сигнал, а затем из полученного решения выразить соотношение для передаточной функции, поделив изображение выбранного выходного сигнала Yi(s) на изображение входного сигнала X(s).
Если внешних воздействий в системе несколько, то необходимо определять передаточные функции по каждому из них отдельно, принимая остальные входные сигналы равными нулю. Затем в линейной системе согласно принципу суперпозиции можно определить произвольную i-ю выходную координату как сумму реакций системы на каждое из этих воздействий с учетом соответствующей передаточной функции:
Yi (s) Wyi/ x1(s) X1(s) ... Wyi/ xn (s)Xn (s). |
(26) |
1.2. Задание для самостоятельной работы
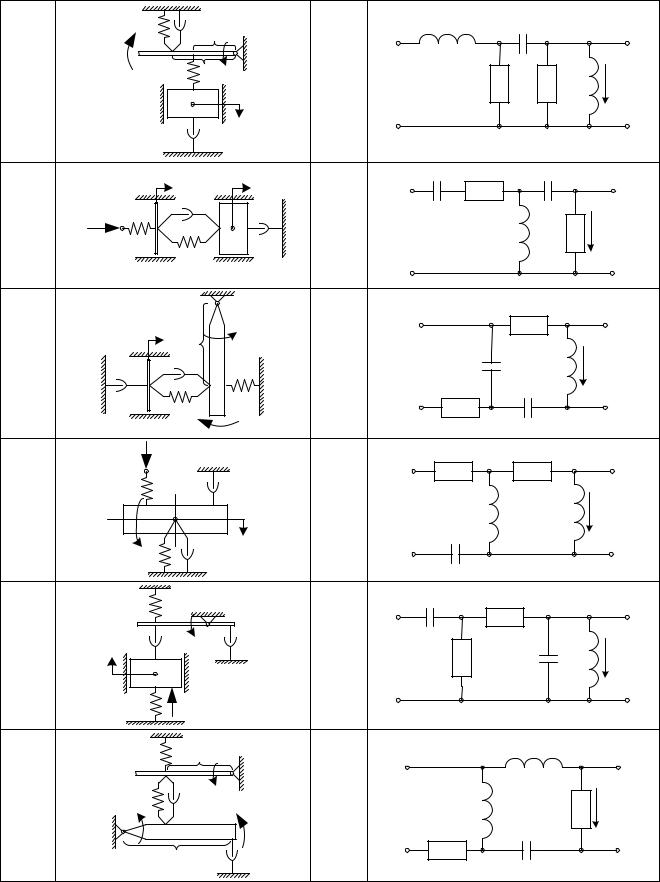
Задана расчетная схема механической (нечетные варианты) или электрической (четные варианты) системы (рис. 4). Параметры системы и сигналы в ней для нечетных вариантов приведены в табл. 1, для четных – в табл. 2.
13

Вмеханической системе внешнее воздействие может быть силовым (сила F(t) и момент силы M(t)) или кинематическим – перемещение точки системы η(t). Выходными сигналами являются обобщенные координаты. Параметры системы: m – масса и J – момент инерции тел, β – коэффициент вязкого трения
иc – жесткость связей, a и b – линейные размеры.
Вэлектрической схеме входным сигналом является напряжение на первом каскаде схемы e1(t), выходные сигналы – напряжение e2(t) на выходном сопротивлении последнего каскада и ток i2(t), протекающий через элементы, составляющие это сопротивление. Параметры системы: R – активное сопротивление резисторов, L – индуктивность катушек, C – емкость конденсаторов.
Определить систему дифференциальных уравнений, описывающих динамику системы и найти передаточные функции для выходных сигналов по внешнему воздействию.
|
|
a |
φ |
b |
β1 |
|
|
R1 |
L2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
|
c1 |
|
|
|
F(t) |
|
|
|
R2 |
|
1 |
|
|
|
|
2 |
e1 |
|
e2 |
||
m |
|
|
x |
C1 |
|
|||||
|
|
|
|
|
|
|
i2 |
|||
|
|
|
|
|
|
|
|
|
C2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
c2 |
|
β2 |
|
|
|
|
|
|
|
|
c1 J |
β1 |
|
β2 |
|
|
|
R1 |
R2 |
|
|
|
|
|
|
|
|
|
|
|
|
c2 |
η(t) |
|
|
|
|
|
3 |
|
4 |
e1 |
L1 |
C2 |
e2 |
||
a |
x |
|||||||
|
|
C1 |
|
|
i2 |
|||
|
φ |
|
|
|
|
|
|
|
|
|
L1 |
|
L2 |
|
c1 |
m |
β1 |
β2 |
|
|
|
|
|
F(t) |
|
|
R1 |
|
|
|||
5 |
|
|
6 |
e1 |
R2 |
e2 |
||
|
|
|
||||||
|
|
|
|
|||||
|
|
|
c2 |
|
|
C1 |
|
i2 |
x |
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
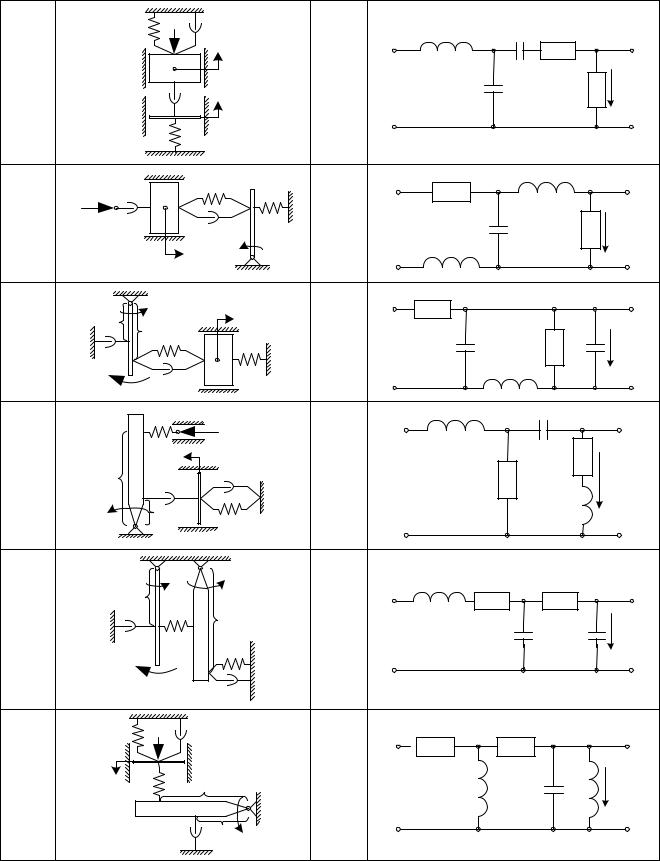
Рис. 4. Расчетные схемы динамических систем (по вариантам)
14
c1 β1 |
a |
L1 |
C2 |
|
|
|
|
|
M |
|
φ |
|
|
|
|
|
|
|
7 |
|
c2 |
b |
8 |
e1 |
R1 |
|
R2 |
L2 |
e2 |
|
|
m |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
i2 |
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β2 |
|
|
|
|
|
|
|
|
|
|
x |
|
y |
|
C1 |
R1 |
|
C2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
β2 |
|
|
|
|
|
|
|
|
|
9 |
η(t) |
c1 |
|
β1 |
10 |
e1 |
|
|
|
|
e2 |
|
|
|
|
|
L1 |
R2 |
|
||||
|
|
|
|
m |
|
|
|
||||
|
|
c2 |
|
|
|
|
|
|
|
i2 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
R2 |
|
|
|
|
x |
|
φ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
|
β2a |
|
|
12 |
e1 |
C1 |
|
L2 |
|
e2 |
|
β1 |
|
c1 |
|
|
||||||
|
|
|
J |
|
|
|
R1 |
|
C2 |
|
i2 |
|
|
c2 |
|
|
|
|
|
|
|
|
M
|
|
η(t) |
|
|
|
|
|
R1 |
R2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
c1 |
a |
b |
β1 |
|
|
|
|
|
|
13 |
|
|
|
|
14 |
e1 |
|
|
e2 |
||
|
m |
|
|
|
L1 |
L2 |
|||||
|
|
φ c2 |
|
|
|
x |
|
C1 |
|
|
i2 |
|
|
|
β2 |
|
|
|
|
|
|
|
|
|
|
c1 |
a |
|
|
|
|
C1 |
R2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
x |
|
β2 |
φ b |
β1 |
16 |
e1 R1 |
C2 |
L2 |
e2 |
|
m |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
i2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c2 |
F(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
c1 |
|
a |
|
|
|
|
L2 |
|
|
|
|
c2 |
|
β2 |
ψ |
|
|
|
|
|
|
17 |
|
|
|
M |
18 |
e1 |
L1 |
R2 |
e2 |
||
|
φ |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
i2 |
|
|
|
|
|
|
J |
|
|
R1 |
C2 |
|
|
|
|
|
b |
|
|
β1 |
|
|
|
|
|
Рис. 4, лист 2
15
c1 |
F(t) |
β1 |
L1 |
C2 R1 |
|
||||
|
|
|
||
|
m |
|
x |
|
|
|
|
|
19 |
β2 |
20 |
e1 |
C1 |
R2 |
e2 |
|
y |
|||||
|
|
|
|
i2 |
||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
c2 |
|
|
|
|
|
|
|
β1 |
m |
c2 |
|
|
|
R1 |
L2 |
|
|
η(t) |
|
c1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||
21 |
|
|
|
β2 φ |
a |
22 |
e1 |
C1 |
|
R2 |
e2 |
|
|
|
|
|
|
|
i2 |
||||
|
|
|
|
|
|
|
L1 |
|
|
||
|
|
|
|
x |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ |
|
|
|
|
R1 |
|
|
|
|
|
a |
x |
|
|
|
|
|
|
|
||
|
b |
|
|
|
|
|
|
|
|
||
23 |
|
c2 |
c1 |
|
24 |
e1 |
C1 |
R2 |
C2 |
e2 |
|
β1 |
|
|
|
||||||||
|
|
|
|
|
|
|
L2 |
|
|
i2 |
|
|
M |
|
β2 |
m |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
J |
c1 |
η(t) |
L1 |
C2 |
|
|
|
|
|
x |
β2 |
|
|
|
R2 |
|
25 |
a |
β1 |
26 |
|
R1 |
|
|
|
|
e1 |
|
e2 |
|||||
|
|
|
|
|
|
|
||
|
φ |
b |
|
|
|
|
L2 |
i2 |
|
c2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
φ |
ψ |
|
L1 |
R1 |
R2 |
|
|
|
a |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
c1 |
b |
|
|
|
|
|
27 |
|
|
28 |
|
|
|
|
|
|
β1 |
|
e1 |
C1 |
C2 |
e2 |
||
|
|
c2 |
|
|||||
|
|
|
|
|
|
i2 |
||
|
|
|
|
|
|
|
||
|
|
M |
J |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β2 |
|
|
|
|
|
|
c1 |
F(t) |
β1 |
|
|
R1 |
R2 |
|
29 |
x |
c2 |
b |
30 |
e1 |
L1 |
C2 L2 |
e2 |
|
||||||||
|
|
J |
|
|
|
|
|
i2 |
|
|
β2 |
a |
φ |
|
|
|
|
Рис. 4, лист 3
16
Т а б л и ц а 1
Параметры и сигналы механической системы
Номер |
m, |
|
J, |
β1, |
|
β2, |
|
с1, |
|
с2, |
|
a, м |
|
b, м |
|
Обобщ. |
Внешн. |
||
варианта |
кг |
|
кг∙м2 |
Н∙с/м |
Н∙с/м |
|
Н/м |
Н/м |
|
|
|
коорд. |
возд. |
||||||
1 |
5 |
|
– |
5 |
|
25 |
|
1000 |
750 |
|
0,5 |
0,8 |
|
x, φ |
F(t) |
||||
3 |
– |
|
0,5 |
8 |
|
12 |
|
2000 |
500 |
|
0,7 |
|
– |
|
x, φ |
η(t) |
|||
5 |
10 |
|
– |
50 |
|
5 |
|
800 |
300 |
|
– |
|
– |
|
x, y |
F(t) |
|||
7 |
2 |
|
– |
6 |
|
15 |
|
200 |
1000 |
|
1,0 |
1,5 |
|
x, φ |
M(t) |
||||
9 |
3 |
|
– |
12 |
|
25 |
|
700 |
900 |
|
– |
|
– |
|
x, y |
η(t) |
|||
11 |
– |
|
2 |
8 |
|
18 |
|
500 |
300 |
|
1,2 |
|
– |
|
x, φ |
M(t) |
|||
13 |
7 |
|
– |
15 |
|
35 |
|
600 |
1800 |
|
0,6 |
0,8 |
|
x, φ |
η(t) |
||||
15 |
8 |
|
– |
16 |
|
28 |
|
250 |
900 |
|
0,7 |
0,3 |
|
x, φ |
F(t) |
||||
17 |
– |
|
3,2 |
10 |
|
23 |
|
1200 |
450 |
|
0,9 |
1,5 |
|
φ, ψ |
M(t) |
||||
19 |
12 |
|
– |
48 |
|
14 |
|
450 |
1300 |
|
– |
|
– |
|
x, y |
F(t) |
|||
21 |
5 |
|
– |
13 |
|
17 |
|
400 |
700 |
|
0,8 |
|
– |
|
x, φ |
η(t) |
|||
23 |
2 |
|
– |
24 |
|
12 |
|
850 |
500 |
|
0,4 |
0,6 |
|
x, φ |
M(t) |
||||
25 |
– |
|
1,4 |
4 |
|
10 |
|
300 |
800 |
|
0,7 |
0,2 |
|
x, φ |
η(t) |
||||
27 |
– |
|
2,5 |
20 |
|
15 |
|
1100 |
350 |
|
0,6 |
1,1 |
|
φ, ψ |
M(t) |
||||
29 |
– |
|
1,8 |
28 |
|
11 |
|
1200 |
650 |
|
0,5 |
0,9 |
|
x, φ |
F(t) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т а б л и ц а 2 |
||
|
|
|
Параметры и сигналы электрической системы |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Номер |
R1, Ом |
R2, Ом |
|
|
L1, мГн |
|
L2, мГн |
|
C1, нФ |
|
C2, нФ |
||||||||
варианта |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
200 |
2000 |
|
|
|
– |
|
|
250 |
|
|
500 |
|
1000 |
||||
4 |
|
300 |
700 |
|
|
500 |
|
|
|
– |
|
1200 |
|
500 |
|||||
6 |
|
800 |
1300 |
|
|
200 |
|
|
650 |
|
|
900 |
|
– |
|||||
8 |
|
400 |
1500 |
|
|
750 |
|
|
300 |
|
|
|
– |
|
250 |
||||
10 |
|
600 |
1800 |
|
|
1200 |
|
|
|
– |
|
1500 |
|
800 |
|||||
12 |
|
400 |
850 |
|
|
|
– |
|
|
900 |
|
|
650 |
|
400 |
||||
14 |
1000 |
500 |
|
|
300 |
|
|
750 |
|
1300 |
|
– |
|||||||
16 |
2000 |
1200 |
|
|
|
– |
|
2500 |
|
1800 |
|
200 |
|||||||
18 |
|
100 |
1250 |
|
|
300 |
|
|
550 |
|
|
|
– |
|
1200 |
||||
20 |
|
350 |
1400 |
|
|
650 |
|
|
|
– |
|
|
700 |
|
1350 |
||||
22 |
|
450 |
1700 |
|
|
300 |
|
|
800 |
|
1000 |
|
– |
||||||
24 |
|
500 |
1200 |
|
|
|
– |
|
|
150 |
|
|
850 |
|
400 |
||||
26 |
|
300 |
900 |
|
|
500 |
|
|
650 |
|
|
|
– |
|
1750 |
||||
28 |
|
250 |
1100 |
|
|
350 |
|
|
|
– |
|
|
600 |
|
300 |
||||
30 |
|
700 |
800 |
|
|
400 |
|
1350 |
|
|
|
– |
|
650 |
|||||
17
Дополнительное задание. Определить временные характеристики системы (импульсную и переходную).
Указание. Для решения задачи можно воспользоваться обратным преобразованием Лапласа и тем свойством, что импульсная характеристика является оригиналом передаточной функции и первой производной переходной характеристики.
1.3.Контрольные вопросы
1)Что такое передаточная функция?
2)Как перейти от системы дифференциальных уравнений к передаточным функциям и обратно?
2.ТОПОЛОГИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ СТРУКТУРНОЙ СХЕМЫ САУ
2.1.Теоретические сведения
В некоторых случаях для упрощения задачи составления дифференциальных уравнений динамики системы и исследования ее динамических свойств можно воспользоваться представлением системы в виде структурной схемы, состоящей из динамических звеньев с типовыми передаточными функциями, соответствующих отдельным функциональным устройствам реальной САУ. Чтобы проводить дальнейшие расчеты динамических характеристик системы, ее исходную модель, представленную структурной схемой, следует представить в удобном виде, соответственно возникает задача преобразования структурной схемы САУ.
В любой схеме САУ всегда можно выделить следующие основные элементы: одномерное динамическое звено, узел (разветвление), сумматор и устройство сравнения (табл. 3). Более сложные конструкции, имеющие место в частных случаях моделирования отдельных видов систем, могут быть представлены с помощью определенной комбинации указанных базовых элементов. Принципиальной разницы между сумматором и устройством сравнения нет, отличие заключается только в знаке арифметической операции, применяемой к сигналам. Тем не менее у устройства сравнения помимо входов, сигналы на которых вычитаются, как правило, существует единственный вход, в который сигнал пода-
18

ется со знаком плюс. Именно с этим сигналом производится сравнение остальных, располагается этот вход на одной линии с выходом устройства сравнения. У сумматора в свою очередь все сигналы складываются.
Т а б л и ц а 3
Базовые элементы структурной схемы САУ
Название элемента |
Обозначение на схеме |
Свойства |
|||||||||
Одномерное |
X |
|
|
|
|
Y |
Y(s) = W(s)X(s) |
||||
W(s) |
|||||||||||
динамическое звено |
|
|
|
|
|
||||||
X |
X1 |
||||||||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
||||||
Узел (разветвление) |
|
|
|
|
|
|
|
|
|
X(s) = X1(s) = X2(s) |
|
|
X |
|
|
X2 |
Z |
||||||
|
|
|
|
|
|||||||
|
|
|
+ |
|
|
||||||
Сумматор |
|
|
|
|
|
|
|
Z(s) = X(s) + Y(s) |
|||
|
|
|
|
|
Y |
|
|
||||
|
|
|
|
|
|
|
|||||
|
|
X |
|
- |
|
Z |
|
||||
Устройство сравнения |
|
|
|
|
|
|
|
Z(s) = X(s) – Y(s) |
|||
|
|
|
|
|
Y |
|
|
||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
При решении данного вида задач исходную структурную схему стремятся привести к типовому виду (рис. 5): в виде единственного динамического звена (для случая исследования разомкнутой системы) либо в виде схемы с единичной (жесткой) отрицательной обратной связью (для случая анализа замкнутой системы).
X |
|
Y |
X |
- |
|
|
|
|
Y |
|||||
|
|
|
W(s) |
|||||||||||
W(s) |
||||||||||||||
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
б |
|
|
|
|
Рис. 5. Типовая структурная схема линейной разомкнутой (а) и замкнутой (б) системы
Различают три основных вида соединения динамических звеньев (рис. 6): последовательное, параллельное согласное и параллельное встречное. Каждое из указанных соединений можно заменить одним динамическим звеном с передаточной функцией, определяемой по формуле:
для последовательного соединения –
W (s) W1(s)W2 (s); |
(27) |
19