

24
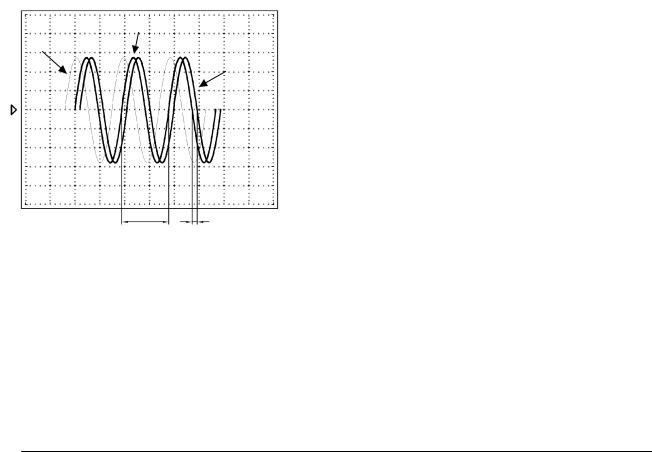
где n(t) – шумовая реализация, в зависимости от конкретных параметров n(t) – закона распределения, величины дисперсии – может привести к значительной погрешности измерения периода T , если в качестве опорных точек использовать локальные экстремумы сигнала u(t) – рис. 2.11.
Главное достоинство рассматриваемого метода – визуальный контроль реализации u(t) , исключающий ошибки измерения частоты, связанные с неправильной оценкой формы сигнала.
2.6. Измерение разности фаз сигналов
Осциллографичесий метод измерения разности фаз
Оценку разности фаз ∆ϕ между двумя сигналами u1 (t) = A1 sin(ωt +ϕ1 ) и u2 (t) = A2 sin(ωt +ϕ2 ) , которая имеет вид ∆ϕ =ϕ1 −ϕ2 , можно получить, используя метод наблюдения сигналов с помощью осциллографа. Поскольку величины ϕ1 и ϕ2 определены только для моделей сигналов, разность фаз ∆ϕ , являющуюся величиной относительной, находят, приняв один из наблюдаемых сигналов – например, А – за опорный – рис. 2.12. Так как полный период колебания составляет величину 2π , то ∆ϕ = 2π(T /τ) , где T
|
|
– величина временного интервала, соответствую- |
|
B` |
A |
щая периоду колебаний, а τ – интервал времени |
|
B |
между отсчетами сигналов А (опорного) и B (из- |
||
|
|||
|
меряемого). Каждый из этих двух отсчетов харак- |
||
|
|
||
|
|
теризуется одинаковыми значениями аргументов |
|
|
|
гармонических функций сигналов А и В. Если ос- |
|
|
|
циллограмма сигнала В находится правее осцил- |
|
|
|
лограммы сигнала А, это значит, что то аргумент |
|
T |
τ |
гармонической функции сигнала В достигает та- |
|
Рис. 2.12. Осциллографический метод |
кого же значения, что и аргумент сигнала А, поз- |
||
измерения разности фаз |
|||
же. В этом случае говорят, что сигнал В опережа- |
|||
|
|
||
ет по фазе сигнала А и рассчитанный фазовый сдвиг ∆ϕ отрицателен. В противном случае (сигнал В’ на рис. 2.12) величину ∆ϕ следует брать с положительным знаком – говорят, что сигнал В’ отстает по фазе от сигнала А.
ОГЛАВЛЕНИЕ Бурый Е.В., Енин В.Н. Методы и средства измерения электрических величин в электротехнике

25
Измерение разности фаз фазометром Принцип работы прибора основан на преобразовании фазового сдвига в напряжение
(или ток) и последующем измерении этого напряжения (тока) с помощью стрелочного или цифрового измерителя. На рис. 2.13 представлена функциональная схема простейшего фазометра, реализующего преобразование фазового сдвига в интервал времени. На выходах компараторов входных сигналов формируются последовательности прямоугольных им-
u1 |
(t) |
CMP |
uP1 (t) |
|
|
PA
u2 |
(t) |
|
∑ |
|
CMP |
uPA (t) |
|||
|
|
uP2 (t)
u1 (t)
u2 (t)
uP1 (t) uP2 (t) uPA (t)
t
t
t t t
Рис. 2.13. Функциональная схема и временные диаграммы работы фазометра с измерительным прибором стрелочного типа
пульсов, которые поступают на вход разностного формирователя. Среднее значение напряжения этого сигнала, измеряемого выпрямительным вольтметром, пропорционально величине фазового сдвига ∆ϕ : Uaver =U0 ∆ϕ /π . Поэтому шкала такого прибора, проградуированная в градусах, линейна. Фазометры такого типа позволяют измерять величины фазовых сдвигов в диапазоне значений 0…1800 с погрешностью 0,1…1,00.
2.7. Измерение комплексного сопротивления участка цепи
Z1 |
|
|
Z2 |
|
|
|
I |
I |
|
2 |
|
1 |
|
|
|
I3 |
I0 |
|
Z0 |
|
|||
|
|
||
|
|
I4 |
|
Z3 |
|
|
Z4 |
~ U
Рис. 2.14. Одинарный мост
Измерения комплексного сопротивления (иногда называемого импедансом) участка цепи обычно выполняют с использованием так называемых мостовых схем. Схема одинарного моста изображена на рис. 2.14. Участки цепи, называемые плечами моста, содержат в общем случае комплексные сопротивления Z1 , Z2 , Z3 и Z4 . В диагональ моста включается нагрузка – комплексное сопротивление Z0 или так называемый
ОГЛАВЛЕНИЕ Бурый Е.В., Енин В.Н. Методы и средства измерения электрических величин в электротехнике

26
нуль-индикатор – измеритель тока стрелочного типа с центральным положением стрелки, которая может отклоняться влево или вправо в зависимости от направления протекающего через прибор тока I0 :
I0 |
=U |
|
|
|
|
|
Z1Z4 − Z2 Z3 |
|
|
|
|
||
Z0 (Z1 + Z2 )(Z3 + Z4 ) + Z1Z2 (Z3 + Z4 ) + Z3 Z4 (Z1 + Z2 ) . |
|
||||||||||||
|
|
|
|||||||||||
Равновесие моста (такое состояние, когда I0 =0) достигается при выполнении равен- |
|||||||||||||
ства Z1Z4 = Z2 Z3 , откуда выводится важное соотношение для фазовых характеристик со- |
|||||||||||||
противлений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ1 +ϕ4 =ϕ2 +ϕ3 , |
|
|
|
|
|
|||||
а также два равенства для мнимых и действительных компонент этих сопротивлений: |
|||||||||||||
|
|
R R |
− X |
|
X |
|
= R R |
− X |
|
X |
1 . |
|
(2.1) |
|
|
1 4 |
|
1 |
|
4 |
2 3 |
|
2 |
|
|
||
|
|
R1 X 4 + X1R4 = R2 X3 + X 2 R3 |
|
||||||||||
Наличие двух уравнений равновесия (2.1) означает необходимость регулирования не менее двух параметров моста переменного тока для достижения равновесия. Из этих уравнения для фазовых характеристик сопротивлений следует важный вывод о том, что если смежные плечи моста содержат активные сопротивления (например, ϕ4 =ϕ3 = 0), то
оба сопротивления Z1 и Z2 могут иметь или индуктивный, или емкостной характер. Если противоположные плечи содержат активные сопротивления (например, ϕ2 =ϕ3 = 0 ), то одно из сопротивлений – Z1 или Z4 – должно быть емкостным, а другое – индуктивным.
|
R1 |
|
r1 |
|
C1 |
R2 |
C1 |
R2 |
|
r1 |
|
|||
|
|
R1 |
|
|
|
|
|
|
|
|
V |
PA |
V |
PA |
|
~ |
|
~ |
|
Cх |
|
|
rх |
|
|
|
|
R3 |
|
rx |
|
R3 |
Cх |
|
|
|
|
||
|
|
а) |
б) |
|
|
~ U |
~ U |
||
|
|
|
Рис. 2.15. Мосты для измерения емкости методом сравнения с мерой
ОГЛАВЛЕНИЕ Бурый Е.В., Енин В.Н. Методы и средства измерения электрических величин в электротехнике

27
На рис. 2.15 представлены принципиальные схемы мостов для измерения емкости методом сравнения с мерой: C1 – образцовая емкость с внутренним сопротивлением r1 , Cx – измеряемая емкость с внутренним сопротивлением rx . Если тангенс диэлектрических потерь имеет малое значение, применяют схему 2.15,а. Условия равновесия моста имеют вид:
rx = (R1 +r1)(R3 / R2 ) , Cx = C1(R2 / R3 ) .
При этом тангенс диэлектрических потерь находится из выражения tgδx =ωC1R3 .
Сопротивления R1 и R3 регулируют до уравновешивания моста, когда измерительный прибор PA покажет близкое к нулю значение напряжения (или тока, если в качестве PA используется амперметр переменного тока).
Для измерения емкости с высоким тангенсом угла диэлектрических потерь целесообразно использовать схему 2.15,б. В этом случае tgδx =1/ωC1R1 .
В зависимости от свойств реактивного элемента (индуктивности или емкости), параметры которого должны быть измерены, используют различные схемы мостов, обеспечивающие необходимую точность измерений [5].
ОГЛАВЛЕНИЕ Бурый Е.В., Енин В.Н. Методы и средства измерения электрических величин в электротехнике