

Выбор электродвигателя для режима s2
Для электроприводов, работающих в режиме s2 (рис. 3.5 *К определению Мэt р.ст при работе ЭП в режиме s2), нецелесообразно выбирать двигатели, предназначенные для работы в режиме s1, так как последние, как правило, обладают ограниченной перегрузочной способностью, в связи с чем в данном случае они недоиспользуются по нагреву.
При выборе двигателей, предназначенных для работы в режиме s2, приходится сталкиваться с тем, что время работы не совпадает с продолжительностью кратковременной работы, определяемой стандартом, — 10, 30, 60 и 90 мин. Кроме того, нагрузка привода за время работы может изменяться. В этих случаях рассчитываются эквивалентные величины, которые приводятся к стандартному значению продолжительности кратковременной работы t ст, ближайшему к реальному значению t.
При выборе двигателя должны соблюдаться следующие условия:

 (3.14)
(3.14)
где Мэtр.ст и Рэtр.ст — эквивалентные значения момента и мощности за время работы двигателя tр, приведенные к ближайшему стандартному значению tр.ст;Мнtр.ст и Р нtр.ст — номинальные значения момента и мощноти двигателя, соответствующие продолжительности кратковременной работы tр.ст .
Выбранный двигатель также должен быть проверен по условиям пуска и по перегрузочной способности.
Выбор электродвигателя для режима s3
Для электроприводов, работающих в режиме s3 (рис. 3.6), целесообразно выбирать двигатели предназначенные для данного режима. Последовательность расчета в этом случае такова.
По
нагрузочной диаграмме определяется
относительная продолжительность
включения ПВ=( tpj/Tц)*100%;
приведенные
к ближайшему стандартному значению
ПВст
= 15, 25,40, 60
%. Эквивалентные значения определяются
по формулам
tpj/Tц)*100%;
приведенные
к ближайшему стандартному значению
ПВст
= 15, 25,40, 60
%. Эквивалентные значения определяются
по формулам
 (3.15)
(3.15)
 (3-16)
(3-16)
где Мнпвст, Рнпвст — номинальные значения момента и мощности двигателя, соответствующие ПВст
Электродвигатель выбирается по следующим условиям:
Выбранный двигатель должен также проверяться по условиям пуска и перегрузочной способности. •
В ряде случаев, при больших значениях ПВ > 70-80 %, возможен 1 выбор двигателя, предназначенного для режима s1, для которого следует принять ПВ = 100%.
☻ 24. Расчёт мощности и выбор ЭД для режимов s4-s8.
Для электроприводов, работающих в режимах s4 и s5, выбираются двигатели, предназначенные для режима s3. Выбор затрудняется тем, что предварительно точная нагрузочная диаграмм для этих режимов не может быть рассчитана, так как заметную долю потерь составляют потери в переходных процессах. Последние же могут быть рассчитаны только после выбора двигателя.
На практике поступают следующим образом: по диаграмме статических нагрузок определяются эквивалентные приведенные момент или мощность, как и для режима s3. При выборе двигателя по каталогу вводится коэффициент запаса, учитывающий дополнительные потери в переходных процессах. Для выбранного двигателя строится уточненная нагрузочная диаграмма, по которой осуществляется поверочный расчет. Сравнение производится с каталожными данными для двигателя, работающего в режиме s3. В данном случае можно воспользоватся также эмпирической формулой для определения эквивалентного тока:
 (3.17)
(3.17)
где
Iп
, Iт,
Id
—
ток в обмотках двигателя при пуске,
торможении и при действии
нагрузки; tn,
tт,
tic..,
t0
—
время пуска, торможения, действия
нагрузки
и паузы;
 1=
0,75;
1=
0,75;
 2
= 0,25;
2
= 0,25;
 3
= 2 — коэффициенты запаса, учитывающие
соответственно ухудшение теплоотдачи
двигателя при пуске и торможении,
во время паузы, отсутствие постоянных
потерь при паузах.
3
= 2 — коэффициенты запаса, учитывающие
соответственно ухудшение теплоотдачи
двигателя при пуске и торможении,
во время паузы, отсутствие постоянных
потерь при паузах.
Для электроприводов, работающих в режимах s6 и s7, обычно выбираются двигатели, предназначенные для режимах s1. Расчет эквивалентных величин в этом случае выполняется по формулам (3.12) и (3.13). Для режима s6 по этим формулам может быть осуществлен выбор двигателя, тогда как для режима s7 они используются для проверки выбранного двигателя, так как для этого режима расчет и построение достаточно точной нагрузочной диаграммы для выбора двигателя невозможны. Для обоих указанных режимов обязательна проверка по условиям пуска и перегрузочной способности.
При работе электропривода в режиме s8, как правило, выбираются двигатели для режима s1. В этом случае предварительно расчет мощности двигателя может быть выполнен по формуле (3.12) или (3.13). При выборе же его по мощности следует ввести коэффициент запаса, учитывающий специфику регулирования скорости электропривода, ухудшение условий охлаждения при снижении скорости, динамические нагрузки при переходе от одной скорости к другой.
☻ 25. Расчёт мощности и выбор ЭД для режима ударной нагрузки.
Для некоторых полиграфических машин характерна ударная нагрузка (бумагорезальные машины, блокообрабатывающие агрегаты, отделочное оборудование), когда момент статической нагрузки резко увеличивается, а затем снижается до момента холостого хода, т.е. электропривод работает в режиме s6, но при условии, что Мси >>Mс0
На рис. 3.7 (*диаграммы статического момента, угловой скорости и момента двигателя при ударном изменении нагрузки*)приведена нагрузочная диаграмма при ударном характере ее изменения.
Любой электропривод обладает инерционностью (J =Jдв +Jп +Jм. поэтому момент и скорость двигателя не соответствуют механической характеристике машины Мс(t). Принимая характеристики двигателя линейными и
пренебрегая электромагнитными переходными процессами, можно записать законы изменении нагрузки изменения момента и скорости двигателя: в режиме холостого хода:
 (3.22)
(3.22)
где
Тм=(J
 0
/Mп.нач)
электромеханическая постоянная привода;
0
/Mп.нач)
электромеханическая постоянная привода;
в режиме нагрузки:
 (3.23)
(3.23)
При периодическом изменении нагрузки для периода, отдаленного от начала работы, т. е. t > 4Тм
 (3.24)
(3.24)
Совместное решение уравнений (3.22)-(3.24) относительно Мmах дает
 (3.25)
(3.25)
Очевидно, с ростом Тм Мгаах уменьшается.
Обычно в ЭП, работающих с ударной нагрузкой, на валу двигателя устанавливается маховик, который берет на себя часть нагрузки при резком ее возрастании. Во время пика нагрузки скорость электродвигателя падает, и часть кинетической энергии, запасенной маховиком, передается на вал электропривода. При снижении нагрузки в режиме холостого хода скорость двигателя возрастает и запас кинетической энергии маховика вновь восстанавливается. Двигатель при этом нагружен более Мc min .
Принцип
совместного выбора двигателя и маховика
для машин с ударной
нагрузкой заключается в том, что
кинетическая энергия маховика к началу
нового цикла должна оставаться неизменной,
а скорость двигателя
— постоянной и равной =
 х.
х.
☻ 26. Разомкнутая САУ ЭП переменного тока с РКСУ.

Рис.4.4. Схема управления АД к.з.р. с динамическим торможением
А, В, С – фазы (3хфазное переменное напряжение), N – нейтраль, SF – автоматический выключатель, М – Адкзр, V – выпрямитель, Т – однофазный трансформатор, SB1 и SB2 – замыкающие кнопочные элементы с самовозвратом, контакт КТ – контакт реле времени, размыкающий с замедлением при срабатывании.
Пуск двигателя – кнопка SB2: срабатывает катушка магн.пуск-ля КМ1, один контакт КМ1 шунтирует кнопку, другой подключает 3хфазное напряжение к АДкзр. Стоп – кнопка SB1: контакт КМ1 отключает двигатель от сети переменного тока, включается контактор КМ2 и реле времени КТ. Обмотки статора подключаются к выпрямителю V, и происходит торможение двигателя. После остановки (через некоторое время, определяемое реле времени) КТ отключает контакт КМ2. Схема приходит в исходное состояние.
☻ 27. Схема управления двухфазным АД с плавным регулированием скорости

Рис.4.6. Схема управления двухфазным АД с плавным регулированием скорости
L1 и L2 – обмотки возбуждения, V1 и V2 – оптронные тиристоры, V3 – однофазный мостовой выпрямитель (диодный мост), V4 – стабилитрон, R6 – балластный резистор. V5 – однопереходной транзистор, SA- рубильник, FU – плавкий предохранитель, R1 – переменный резистор. L1 подключена к сети через V1и V2, напряжение на L1 регулируется углом отпирания этих тиристоров. L2 подключена к сети через конденсатор С2 и напряжение на ней не изменяется.
Ток в обмотке L2 опережает ток в обмотке L1 и обмотки в пространстве сдвинуты на 90град, в результате возник. вращ. магн. поле статора. СФУ оптронными тиристорами:
1) узел питания: состоит из V3 (подключен парал-но тиристорам, сл-но, напряжение на V3 есть при запертых тиристорах; при отпирании тиристора, напряжение на выходе V3 и V4 падает до нуля в течение рабочего полупериода тиристора), V4, R6;
2) релаксационный генератор импульсов: построен на V5, который отпирается при напряжении на эмиттере 7-8В (т.е. при зарядке конд-ра С1 напряжение должно достичь 7-8В в цепи R1-R2-C1, сопротивление между Э и Б1 падает до нуля, С1 разряжается через светодиоды оптронных тиристоров и частично через R4, отпирается тот тиристор, анодное напряжение которого положительно), возвращается в запертое состояние при 2-3В; после отпирания тиристора напряжение питания релаксационного генератора = 0, появляется в начале след. полупериода. Ток управ-я: iу=Uэ-2∆U/R5. Напряжение на L1 макс. при R1=0.
☻ 28. Структурная съема частотного регулирования скорости АДкзр (из ргр).

SF – автоматический выключатель; ИПТ – стабилизированный источник постоянного тока; ПЛК – программируемый логический контроллер; ТУ – тормозное устройство (прерыватель с тормозным резистором); ПЧ – преобразователь частоты;КУ – коммутационное устройство; ЭМТ – электромеханический тормоз; ПМ – полиграфическая машина; ЭД – асинхронный двигатель с к.з.р. с встроенным ЭМТ; ПУ – пульт управления ПМ.
По функциональной схеме САУ ЭП (рис. 6) с обратной связью по скорости видно, что при изменении момента сопротивления Мс, т.е. нагрузки, например её уменьшении, увеличивается скорость вращения вала двигателя ωдв., что ведёт за собой изменению значения на импульсном датчике скорости, т.к. вал датчика скорости жёстко связан с валом двигателя. В свою очередь значение обратной связи, пропорционально изменяющееся в зависимости от ωдв, подается на вход преобразователя частоты и ведет к изменению частоты питающего напряжения.
☻ 29. Схема управления ДПТ малой мощности с релаксац. генератором в сфу (лаба 6 ЭП-3)
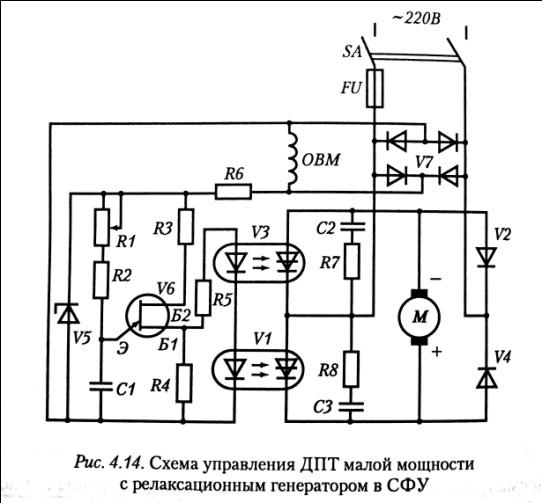
V5 — стабилитрон, V6 — транзистор, R1 — потенциометр, R2 – R6 – резисторы, С1 – конденсатор, SA- рубильник, FU – плавкий предохранитель. Управляющие импульсы тиристоров формируются с помощью релаксационного генератора, основой которого служит однопереходный транзистор V6 (принцип действия релаксационный генератор импульсов: построен на V6, который отпирается при напряжении на эмиттере 7-8В (т.е. при зарядке конд-ра С1 напряжение должно достичь 7-8В в цепи R1-R2-C1, сопротивление между Э и Б1 падает до нуля, С1 разряжается через светодиоды оптронных тиристоров и частично через R4, отпирается тот тиристор, анодное напряжение которого положительно). В данном случае сопротивления резисторов R4 и R5 выбраны такими, чтобы падение напряжения на R4 от сквозного тока превышало напряжение запирания U транзистора V6. Поэтому после разряда конденсатора С1 транзистор V6 остается открытым до конца полупериода напряжения питания. Ток управления имеет импульсную форму, близкую к треугольной. Значение тока управления определяется по формуле Iу = (Uэ-∆Uсд)/R5, где Uэ— напряжение отпирания транзистора V6; ∆Uсд — падение напряжения на двух светодиодах оптронных тиристоров (примерно 2,4 В).
☻ 30. Разомкнутая САУ ЭП по системе ТП-ДПТ с СФУ вертикального типа (почти лаба 3 ТП-3).
Разомкнутая САУ ЭП постоянного тока с тиристорным преобразователем с силовой частью, построенной по однофазной мостовой несимметричной схеме. Силовая часть: два оптронных тиристора ( V1, V3) и два силовых диода ( V2, V4). Для питания обмотки возбуждения LM - выпрямитель V5. Система фазового управления тиристорами состоит из источника опорных напряжений и формирователей импульсов. Два опорных напряжения со сдвигом в 180° формируются на резисторах R6 и R7 благодаря тому, что процесс заряда С4 и С5 составляет около 1/4 периода, а процесс разряда — около 1/3 периода. Постоянная времени разряда Т= R6C4 =R7C5. Сдвиг по фазе на 180° между опорными напряжениями соответствует сдвигу на 180° между анодными напряжениями на тиристорах.