


Так как о характере движения толкателя по кривой перемещения S f (t) судить затруднительно, то обычно
задают диаграмму его ускорения a f (t) .
Диаграмму перемещения S f (t) , необходимую для построения профиля кулачка, получают методом двукратного интегрирования диаграммы ускорения a f (t) .
7.4. Угол давления в кулачковых механизмах
Для эффективной работы кулачкового механизма важно обеспечить высокий КПД и отсутствие заклинивания. Угол давления позволяет выявить эти условия его работы.
Углом давления в кулачковых механизмах называют угол между общей нормалью к профилю кулачка в точке касания толкателя и направлением движения (скорости) толкателя (рис. 53).
Рис. 53. Угол давления в кулачковом механизме
104
Сила давления кулачка на толкатель F (без учета сил трения) направлена по нормали к профилю кулачка.
Под действием движущей силы F cos толкатель поднимается и преодолевает силы полезных сопротивлений и силы трения в направляющих толкателя.
Сила вызывает перекос толкателя и возникновение сил трения в направляющих толкателя. Если эта сила велика, то может произойти заклинивание и поломка толкателя.
Для уменьшения силы выгодно, чтобы угол давления был как можно меньше.
Однако, с другой стороны, с уменьшением угла возрастают размеры кулачка, что нежелатель-
Учитывая вышеизложенное, при проектировании кулачковых механизмов устанавливают максимальное зна-
чение угла давления max , которое не должно быть пре-
взойдено, так как в противном случае возникают большие силы трения, снижается КПД кулачкового механизма и возможны заклинивание и поломка толкателя.
На практике значения угла давления max прини-
мают равными: 30° – для поступательно движущихся толкателей; 45° – для качающихся толкателей (коромысел).
7.5. Определение угла давления по заданному закону движения толкателя и минимального размера кулачка
Как было отмечено, выбор угла давления влияет на размеры кулачка. Из конструктивных соображений всегда желательно выбрать кулачок возможно меньших размеров, т.е. с минимальным радиусом R . Поэтому при построении профиля кулачка нужно обеспечить, с одной стороны, что-
бы угол давления не превосходил max , а с другой, чтобы
105
кулачок имел минимальные размеры. Для этого необходимо до построения профиля кулачка по известным параметрам уметь определять угол давления.
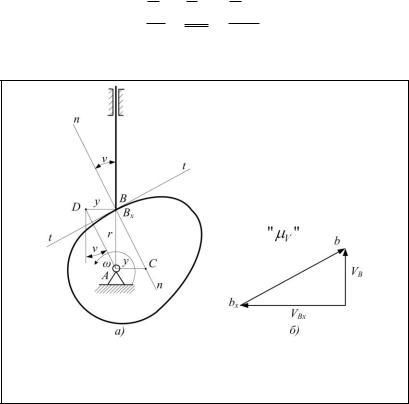
Рассмотрим определение угла давления , если
известны закон движения толкателя и положение оси вращения кулачка (рис. 54, а).
Примем, что точка Bx принадлежит кулачку, а точка B – толкателю.
Тогда VBx r ,
где – угловая скорость кулачка;
r – расстояние точки Bx до оси вращения кулачка.
VB VBx VBBx .
Для решения этого векторного уравнения строим план скоростей в масштабе V (рис. 54, б).
Рис. 54. К определению угла давления в кулачковом механизме:
а – схема механизма; б – план скоростей
106
Проведем через ось вращения кулачка линию, перпендикулярную направлению движения толкателя, до пересечения с нормалью. Получим отрезок y AC .
Треугольники ABxC (на схеме механизма) и pbxb (на плане скоростей) подобны как треугольники с взаимно перпендикулярными сторонами. Из подобия сле-
дует |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dSB |
|
|
|
|
|
|
|
|
|
y |
|
|
VB |
|
|
dt |
|
dSB |
|
|
dSB |
. |
|||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
r VB |
x |
r |
r dt |
|
r d |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Откуда |
y |
dSB |
, т.е. аналог скорости толкателя. |
||||||||||||||
|
|||||||||||||||||
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
||
|
Если теперь отложить отрезок |
y |
( AC) от точки |
||||||||||||||
B в направлении, перпендикулярном направлению движения толкателя (влево), и его конец (точку D ) соединить прямой линией AD с осью вращения кулачка (точкой A ), то угол между этой линией и направлением движения толкателя, как это видно из чертежа, равен углу давления .
Таким образом, для определения угла давления не нужно знать профиль кулачка. Достаточно вычислить по заданному закону движения толкателя значение величины отрезка y ( AC) , отложить этот отрезок от данного поло-
жения точки B толкателя в направлении, перпендикулярном направлению ее скорости, и соединить прямой линией конец отрезка с осью вращения кулачка. Угол между этой линией и направлением скорости точки B – угол давления. Отрезок y откладывают в сторону направления вектора
скорости точки B толкателя, если повернуть его на угол 90° по направлению вращения кулачка.
107
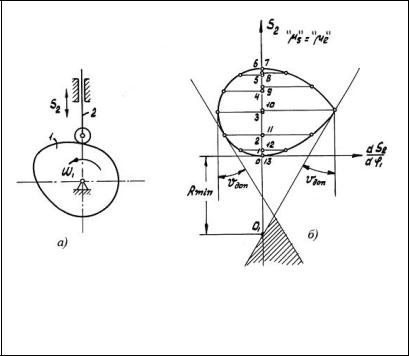
Для определения минимального радиуса кулачка по заданному движению толкателя определяют значение отрезка y для нескольких положений толкателя на фазах
подъема и опускания. Затем откладывают эти отрезки так, как было указано выше, и соединяют их концы плавными кривыми. Далее к этим кривым проводят касательные под заданными максимальными углами давления соответственно для фазы подъема и опускания толкателя (рис. 55).
Рис. 55. К определению минимального радиуса кулачка:
а – схема механизма; б – определение минимального радиуса кулачка Rmin
За центр вращения кулачка O1 можно принять лю-
бую точку, лежащую внутри заштрихованной области. В случае, когда ось толкателя проходит через центр враще-
ния кулачка, минимальный радиус Rmin получают пересечением оси толкателя с заштрихованной зоной.
108