

также определить законы его движения и силы, действующие на отдельные части механизма.
1.Основные понятия и определения, принятые в теории механизмов и машин
1.1. Звено механизма
Всякий механизм представляет собой систему тел, различным образом соединенных друг с другом и движущихся как единое целое. Каждое такое тело называют звеном. В зависимости от конструкции звено может быть простым или сложным. Звено, изготовленное из одноименного по марке и наименованию материала без применения сборочных операций, называют деталью. Сложное звено представляет собой группу деталей, соединенных между собой сборкой.
Каждая подвижная деталь или группа деталей, образующая одну жесткую подвижную систему тел, носит название подвижного звена механизма. Все неподвижные детали, образующие одну жесткую неподвижную систему тел, носят название неподвижного звена или стойки (станины, рамы и т.п.). В любом механизме мы имеем одно неподвижное звено и одно или несколько подвижных звеньев.
1.2. Кинематическая пара
Звенья соединяются между собой подвижно. Подвижное соединение двух соприкасающихся звеньев называют кинематической парой. Те части звеньев, которыми они непосредственно соприкасаются друг с другом, образуя кинематическую пару, называют элементами контакта звеньев. В зависимости от того, что представляют собой
4
элементы контакта – поверхность, линию или точку, кинематические пары делят на низшие и высшие.
В низших кинематических парах звенья контактируют по поверхности, в высших – по линии или в точках.
1.3. Кинематическая цепь
Кинематической цепью называют связанную систему звеньев, образующих между собой кинематические пары. Все кинематические цепи подразделяют на плоские и пространственные. Если в кинематической цепи звенья могут двигаться в различных плоскостях, то такую цепь называют пространственной. Если же в кинематической цепи все еѐ звенья могут двигаться только в одной или параллельных плоскостях, то такую цепь называют плоской. Кинематические цепи могут быть незамкнутые и замкнутые, простые и сложные (рис. 1). Незамкнутой называют такую кинематическую цепь, в которой есть звенья, входящие в одну кинематическую пару, а замкнутой – в которой каждое звено входит, по крайней мере, в две кинематические пары. Простой называют кинематическую цепь, у которой каждое звено входит в соединение с другим звеном с помощью одной или двух кинематических пар. Если в кинематической цепи хотя бы одно звено входит в три или более кинематические пары, такую цепь называют сложной.
5
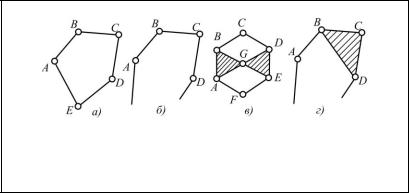
Рис. 1. Кинематические цепи:
а– замкнутая простая; б – незамкнутая простая;
в– замкнутая сложная; г – незамкнутая сложная
1.4.Механизм
Механизм есть система тел, предназначенная для преобразования движения одного или нескольких тел в требуемые движения других тел. Следовательно, механизм представляет собой кинематическую цепь, в которой при заданном движении одного или нескольких звеньев относительно любого из них все остальные звенья совершают однозначно определяемые движения. Параметры движения механизма определяют обычно относительно неподвижного звена – стойки (станины, рамы и т.п.).
1.5. Машина
Машина есть устройство, выполняющее механические движения для преобразования энергии, материалов или информации с целью замены или облегчения физического и умственного труда человека. Машину, в которой все преобразования энергии, материалов и информации выполняются без непосредственного участия человека, называют машиной-автоматом.
6