

29
Вычисляя сумму элементарных работ двух внутренних сил F1 J и F2J ,
получаем
F1J dS1 cos(P1 J ,υ1 )+ F2J dS2 cos(P2 J ,υ2 )= F1′M1M1′ − F1M 2 M 2′
т.к. каждой внутренней силе соответствует другая, равная ей по модулю и противоположная по направлению, то сумма элементарных работ всех внутренних сил тоже равна нулю.
δAJ = ∑δAiJ = 0
Конечное перемещение является совокупностью элементарных переме-
щений, поэтому AJ = 0, т.е. сумма работ внутренних сил твердого тела на любом его перемещении равна нулю.
2.5.2. Работа внешних сил, приложенных к поступательно движущемуся телу
К каждой точке тела приложены внешние и внутренние силы (рис. 18). Так как работа внутренних сил на любом перемещении равна нулю, то следует вычислить работу лишь внешних сил F1 E , F2E … FnE . При поступательном
движении траектории всех точек идентичны, а вектора элементарных перемещений геометрически равны, т.е.
dri = dr = drc .
Элементарная работа силы Fi E
δAiE = Fi E drc .
Элементарная работа всех внешних сил
δAE = ∑δAiE = ∑F iE drc = drc ∑Fi E = R E drc ,
где R E - главный вектор внешних сил.
Работа на конечном перемещении
(2 )
AE = ∫R E drc .
(1)
Работа сил при поступательном перемещении твердого тела равна работе главного вектора внешних сил на элементарном перемещении центра масс.
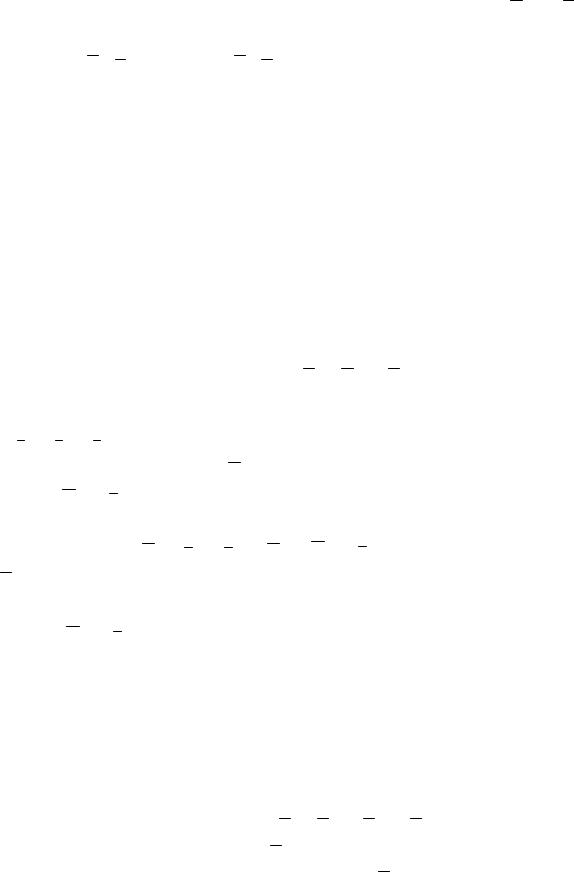
2.5.3. Работа внешних сил, приложенных к вращающемуся телу
Предположим, что к твердому телу, вращающемуся вокруг неподвижной оси Z , приложены внешние силы F1 E , F2E … Fi E … FnE (рис. 19).
Вычислим работу одной силы Fi E , приложенной к точке Mi , описывающей окружность радиуса Ri . Разложим силу Fi E на три составляющие, направленные по естественным осям траектории точки Mi .
30
 ω
ω
ξ
Е
E F 1
F n
E |
|
F ib |
Ri |
|
|
E |
|
F in |
dφ |
Mi dSi
F iτ
Е
F 2
Рис. 19
Z M1(x1,y1,z1)
M
M2(x2,y2,z2)
m g
O
Y
Рис. 20
X
31
При элементарном повороте тела на угол dϕ точка Mi описывает дугу dSi = Ri dϕ . На этом перемещении работу составляет только касательная составляющая силы, а работа перпендикулярных к вектору скорости составляющих силы FinE и FibE равна нулю.
δAiE = FiτE dSi = FiτE Ri dϕ = MiEτ dϕ = MizE dϕ , т.к. моменты нормальной и бинормальной составляющих силы Fi E относительно оси Z равны нулю эле-
ментарная работа всех сил, приложенных к твердому телу
δAE = ∑δAiE = ∑M izE dϕ = dϕ∑MizE = M zE dϕ .
Таким образом, элементарная работа внешних сил, приложенных к вращающемуся твердому телу равна
δAE = M zE dϕ .
При конечном повороте тела работа внешних сила равна
ϕ2
AE = ∫M zE dϕ .
ϕ1
Если главный момент внешних сил M zE = const , то работа внешних сил на конечном перемещении равна A = M zE (ϕ2 −ϕ1 ).
Работа при вращательном движении твердого тела равна работе главного момента внешних сил относительно оси вращения на элементарном угловом перемещении.
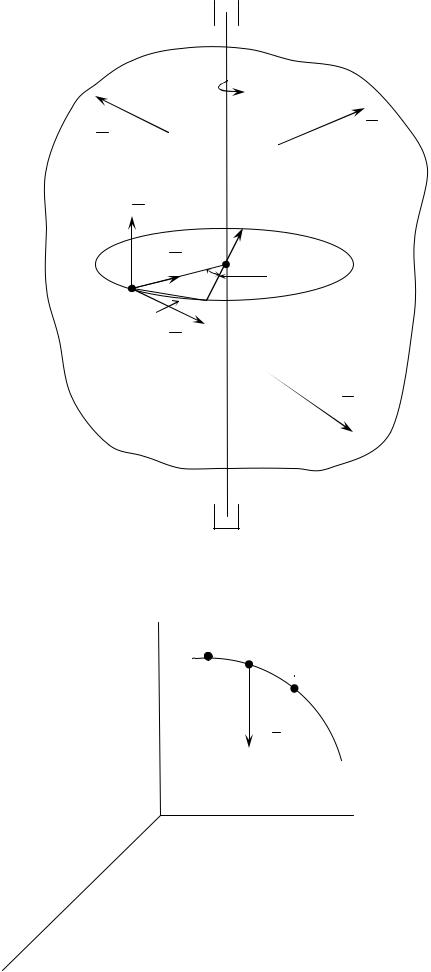
2.6. Работа силы тяжести
Пусть точка массой m перемещается под действием силы тяжести из положения M1 (x1 , y1 ,z1 ) в положение M 2 (x2 , y2 ,z2 ) (рис. 20).
Элементарная работа силы вычисляется как скалярное произведение вектора силы F (X ,Y ,Z ) на вектор элементарного перемещения dr (dx,dy,dz)
δA = F dr = Xdx +Ydy + Zdz ,
где X ,Y ,Z - проекции силы F ,
dx,dy,dz - проекции вектора перемещения dr на оси x, y,z . При движении под действием силы тяжести
X = 0, Y = 0, |
Z = −mg и δA = −mgdz , |
а работа силы на конечном перемещении |
|
(2 ) |
Z2 |
A = ∫δA = −mg ∫dz = −mg(z2 − z1 ) |
|
(1) |
Z1 |
А= ±mgh .
Если точка опускается (независимо от вида траектории), т.е. z2 < z1 , работа силы тяжести положительна, если точка поднимается, работа силы тя-

32
жести отрицательна. Если точка перемещается горизонтально (z2 = z1 ), работа силы тяжести равна 0.
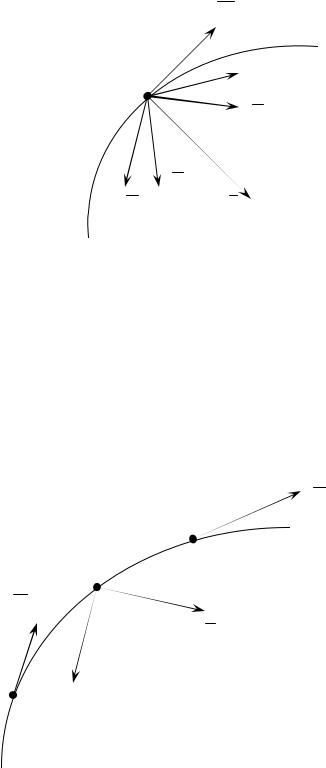
3. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Рассмотрим материальную точку M массой m , движущуюся под дей-
ствием сил |
|
, |
|
|
|
|
|
|
|
||||
F1 |
|
F2 … Fn (рис. 21) со скоростью υ |
, модуль которой равен |
||||||||||
υ = dS , где S - дуговая координата. |
|||||||||||||
dt |
|
|
|
|
|
|
|
|
dυ |
|
|||
Проекция ускорения на касательную равна aτ = |
. |
||||||||||||
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
dt |
||
Учитывая, что скорость υ |
- сложная функция времени, т.е. υ = f (S(t)), |
||||||||||||
то |
|
|
|
|
|
|
|
|
|
|
|||
aτ = dυ |
= dυ |
|
dS |
=υdυ . |
|||||||||
|
dt |
|
|
dS |
|
dt |
|
dS |
|||||
Основное уравнение динамики в проекции на касательную имеет вид |
|||||||||||||
maτ = ∑Fiτ |
или |
|
|
|
|
|
|||||||
m |
υdυ |
|
= ∑Fiτ . |
|
|
|
|
|
|||||
dS |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
Умножим обе части уравнения на dS и проинтегрируем обе части равенства в пределах, соответствующих начальному и конечному положениям
точки M1 |
и M 2 |
|||||||||||||
|
|
mυdυ = dS∑Fiτ |
||||||||||||
|
|
|
|
υ2 |
|
|
|
|
|
|
|
|
|
S2 |
|
|
m∫υdυ = ∑∫Fiτ dS , откуда |
||||||||||||
|
|
|
|
υ1 |
|
|
|
|
|
|
|
|
|
S1 |
|
|
|
|
mυ |
2 |
|
|
|
mυ2 |
|||||
|
|
|
2 |
|
|
|
− |
|
|
|
1 |
= ∑Ai . |
||
|
|
|
|
|
|
|
|
2 |
||||||
|
|
2 |
|
|
|
|
|
|
|
|||||
|
mυ2 |
Половина произведения массы материальной точки на квадрат скорости |
||||||||||||
|
|
|
называется кинетической энергией точки. |
|||||||||||
|
|
|
|
|||||||||||
2 |
|
|||||||||||||
|
|
|
|
|
mυ22 |
|
|
|||||||
|
|
T = |
−кинетическая энергия точки после перемещения, |
|||||||||||
|
|
|
|
|||||||||||
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
T = |
|
mυ |
2 |
|
− кинетическая энергия точки до перемещения, |
|||||||
|
|
|
|
|
|
|
1 |
|
||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
mυ |
2 |
|
|
− |
mυ2 |
|||||
|
|
|
2 |
|
|
|
|
|
|
1 |
- изменение кинетической энергии точки при перемещении |
|||
|
|
|
|
|
|
|
2 |
|||||||
|
|
2 |
|
|
|
|
|
|
|
|||||
из положения M1 в положение M 2 .
33
V
M |
F |
2 |
F 1
F n |
F i |
а |
Рис. 21
Vi 2
Mi2
Mi
Vi1
J
Fi
Mi1 |
|
E |
|
||
Fi |
||
Рис. 22