

ФИЗИКА3 БОЛЬШЕ ГОТОВОГО1 / 1-st / Механика / alexlab15
.docМинистерство образования Российской Федерации
Санкт-Петербургский государственный горный институт
имени Г.В. Плеханова (технический университет)
Кафедра общей и технической физики
ЛАБОРАТОРИЯ МЕХАНИКИ
РАБОТА 15
изучение прецессии гироскопа
Выполнил: студент 1 курса, геологоразведочного факультета,
группы РФ-02, Гончаров А.Е.
Проверил: Мезенцев А.П.
САНКТ – ПЕТЕРБУРГ
2003
Цель работы – экспериментально исследовать основные свойства гироскопа, изучить законы вращательного движения твёрдого тела.
Общие сведения
Гироскопом
называют массивное симметричное тело,
вращающееся с большой скоростью вокруг
оси симметрии. Основное свойство
гироскопа - способность сохранять
неизменное направление 

 оси
вращения при отсутствии действующего
на него момента внешних сил. Гироскопы
широко применяются в технике: в качестве
указателей направления при движении
судов, самолетов и т.д.
оси
вращения при отсутствии действующего
на него момента внешних сил. Гироскопы
широко применяются в технике: в качестве
указателей направления при движении
судов, самолетов и т.д.
 Рассмотрим
гироскоп, основным элементом которого
является диск D,
вращающийся со скоростью
Рассмотрим
гироскоп, основным элементом которого
является диск D,
вращающийся со скоростью
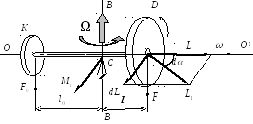
![]() вокруг горизонтальной оси ОО'
(см. рисунок). Ось гироскопа шарнирно
закреплена в точке C.
Прибор снабжен противовесом К.
Если противовес установлен так, что
точка C
является центром масс системы (m
- масса гироскопа; m0
- масса противовеса К;
масса стержня пренебрежимо мала), то
без учёта трения запишем:
вокруг горизонтальной оси ОО'
(см. рисунок). Ось гироскопа шарнирно
закреплена в точке C.
Прибор снабжен противовесом К.
Если противовес установлен так, что
точка C
является центром масс системы (m
- масса гироскопа; m0
- масса противовеса К;
масса стержня пренебрежимо мала), то
без учёта трения запишем:
![]()
т.е.
результирующий момент сил, действующий
на систему, равен нулю. Тогда справедлив
закон сохранения момента импульса
![]() :
:
![]() .
(1)
.
(1)
Иными
словами, в этом случае
![]() const;
где J
- момент инерции гироскопа,
const;
где J
- момент инерции гироскопа,
![]() -
собственная угловая скорость вращения
гироскопа.
-
собственная угловая скорость вращения
гироскопа.
Поскольку
момент инерции диска относительно его
оси симметрии есть величина постоянная,
то вектор угловой скорости также остается
постоянным как по величине, так и по
направлению. Вектор
![]() направлен по оси вращения в соответствии
с правилом правого винта. Таким образом,
ось свободного гироскопа сохраняет
своё положение в пространстве неизменным.
направлен по оси вращения в соответствии
с правилом правого винта. Таким образом,
ось свободного гироскопа сохраняет
своё положение в пространстве неизменным.
Если
к противовесу К
добавить еще один с массой m1,
то центр масс системы сместится и
возникнет вращающий момент
![]() относительно точки C.
Согласно уравнению моментов,
относительно точки C.
Согласно уравнению моментов,
![]() . Под действием этого вращающего момента
вектор момента импульса получит
приращение
. Под действием этого вращающего момента
вектор момента импульса получит
приращение
![]() ,
совпадающее по направлению с вектором
,
совпадающее по направлению с вектором
![]() :
:
![]() (2)
(2)
Векторы
сил тяжести
![]() и
и
![]() направлены вертикально вниз. Следовательно,
векторы
направлены вертикально вниз. Следовательно,
векторы
![]() ,
а по (2), и
,
а по (2), и
![]() ,
лежат в горизонтальной плоскости. Спустя
время
,
лежат в горизонтальной плоскости. Спустя
время
![]() действующий на систему момент импульса
действующий на систему момент импульса
![]() равен
равен
![]() .
.
Таким
образом, вектор![]() изменяет своё направление в пространстве,
всё время оставаясь в горизонтальной
плоскости. Учитывая, что вектор момента
импульса гироскопа направлен вдоль оси
вращения, поворот вектора
изменяет своё направление в пространстве,
всё время оставаясь в горизонтальной
плоскости. Учитывая, что вектор момента
импульса гироскопа направлен вдоль оси
вращения, поворот вектора
![]() на некоторый угол d
за время dt
означает поворот оси вращения на тот
же угол. В результате ось симметрии
гироскопа вращается вокруг неподвижной
вертикальной оси ВВ'
с угловой скоростью:
на некоторый угол d
за время dt
означает поворот оси вращения на тот
же угол. В результате ось симметрии
гироскопа вращается вокруг неподвижной
вертикальной оси ВВ'
с угловой скоростью:
![]() .
(3)
.
(3)
Такое
движение называется регулярной
прецессией,
а величина
![]() - угловой скоростью прецессии.
- угловой скоростью прецессии.
Выясним зависимость угловой скорости прецессии гироскопа от основных параметров системы. Спроецируем равенство (2) на горизонтальную ось, перпендикулярную ОО'
![]() .
.
Из
геометрических соображений (см. рисунок)
при малых углах поворота
![]() ,
а тогда
,
а тогда
![]() ,
и угловая скорость прецессии выражается:
,
и угловая скорость прецессии выражается:
![]() .
(4)
.
(4)
Основные формулы:
-
= / t – угловая скорость;
![]() - момент инерции
гироскопа;
- момент инерции
гироскопа;
![]() - максимальная
ошибка;
- максимальная
ошибка;
![]() - момент инерции
гироскопа с учетом погрешности.
- момент инерции
гироскопа с учетом погрешности.
|
|
|
|
|
t |
t |
|
|
|
|
J |
|
Об/с |
|
Рад. |
|
с. |
|
Рад/с. |
|
|
кг∙м2 |
|
|
16,7 |
1,7 |
141,1 |
0,005 |
1. 5,991 |
0,005 |
1. 23,602 |
24,929 |
0,005 |
1,295∙10-4 |
5∙10-8 |
|
2 5,439 |
2. 25,997 |
|||||||||
|
3. 5,614 |
3. 25,187 |
|||||||||
|
33,3 |
141,1 |
1. 8,051 |
1. 17,563 |
17,198 |
0,941∙10-4 |
|||||
|
2. 8,193 |
2. 17,259 |
|||||||||
|
3. 8,431 |
3. 16,771 |
|||||||||
|
50 |
141,1 |
1. 15,330 |
1. 9,224 |
9,230 |
1,168∙10-4 |
|||||
|
2. 15,189 |
2. 9,309 |
|||||||||
|
3. 15,440 |
3. 9,158 |
|||||||||
|
66,7 |
141,1 |
1. 18,915 |
1. 7,475 |
7,359 |
1,098∙10-4 |
|||||
|
2. 19,809 |
2. 7,138 |
|||||||||
|
3. 18,943 |
3. 7,464 |
|||||||||
|
83,3 |
141,1 |
1. 25,491 |
1. 5,731 |
5,711 |
1,133∙10-4 |
|||||
|
2. 24,146 |
2. 5,856 |
|||||||||
|
3. 24,669 |
3. 5,547 |
Значение момента инерции гироскопа с учетом погрешностей:
Опыт №1:
J=(1.295±0.247)∙10-4
![]() =(1,127±0,329)∙10-4
=(1,127±0,329)∙10-4
Опыт №2: J=(0.941±0.131)∙10-4
Опыт №3: J=(1.168±0.11)∙10-4
Опыт №4: J=(1.098±0.099)∙10-4
Опыт №5: J=(1.133±0.092)∙10-4

Вычисления:
Опыт 1.
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Вывод: с помощью этого опыта я исследовал основные свойства гироскопа и изучил законы вращательного движения твердого тела.