

Первичные изм. преобразователи. Часть 1
.pdfуравнений, так как это было сделано для сегнетовой соли и дигидрофосфата аммония.
Если же предварительно выполнить условия, при которых частоты мод колебаний имеют кратные значения, и возбуждать пьезоэлемент электрическим импульсом, в спектре которого отсутствуют частоты, равные кратным частотам мод колебаний, то излученный импульс будет иметь длительность, равную одному периоду частоты основной моды колебаний.
Пьезоэлектрические преобразователи рассчитывают следующим образом: выбирают пьезоматериал, у которого отсутствуют упругие постоянные С16 и С26. Это условие будет обеспечивать несвязность мод колебаний. Рассчитывают значения сторон а и b пьезоэлементов, при которых возбуждаются моды колебаний с кратными значениями частот. Значение толщины пьезоэлемента выбирают не более 0,1 длины меньшей стороны, при этом толщинными модами колебаний практически можно пренебречь. Пьезоэлементы вырезают из монокристалла вдоль соответствующих осей упругой симметрии и на каждый из них наносят электроды. С целью формирования достаточно острой диаграммы направленности, пьезоэлементы располагают на линейной или круговой базах и устанавливают в металлический корпус, соединяя электроды с корпусом и коаксиальной клеммой.
Каждый пьезоэлемент в виде квадратной или прямоугольной пластины имеет свою мембрану и представляет собой унифицированный пьезоэлектрический модуль. Модуль снабжен своими держателями, позволяющими механически закреплять элементы на различных базах рис. 5.6.1,а и 5.6.1,б.
Описанные общие положения были использованы при разработке пьезоэлектрических преобразователей, излучающих упругие импульсы малой длительности.
190
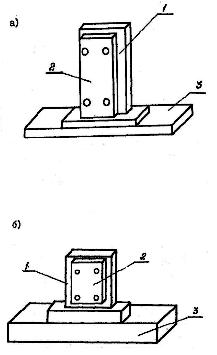
Рис. 5.6.1. Пьезоэлектрические модули для излучателя (а) и приемника
(б): 1- пьезопластина; 2- электроды; 3- мембрана модуля
5.7. Оптимизация спектра электрического импульса возбуждения с целью получения упругих импульсов малой длительности
Рассмотрим движение какой-либо точки пьезокерамического диска, колеблющегося по толщине, например, центра диска.
Характер движения этой точки аналитически может быть представлен в виде х = х(t), (5.7.1)
где t - время.
Известно уравнение, описывающее колебательный процесс указанных систем
d 2 x |
+ 2γ ( |
dx |
) + Ω02 x = f (t0 ) , |
(5.7.2) |
2 |
dt |
|||
dt0 |
0 |
|
|
|
|
|
|
191 |
|
где х = х (t 0) - смещение точки от положения равновесия;
g - коэффициент затухания;
W- собственная частота колеблющейся точки.
Вкачестве функции ¦(t0), представляющей правую часть дифференциального уравнения, примем функцию вида:
0 |
при t0<0 ; |
|
f(t0)= {1-e-at |
при 0<t0<t; |
(5.7.3) |
e-a(t-τ)-e-at
Геометрической интерпретацией является прямоугольный П-видеоимпульс,
где а - величина, характеризующая крутизну фронтов импульса; t - длительность импульса.
Прежде чем приступить к решению неоднородного дифференциального уравнения второго порядка, а нас будет интересовать форма огибающей смещения, рассмотрим характер колебаний осциллятора при воздействии на него бесконечно короткого, но бесконечно высокого импульса единичной площади
Рd (t - t 0) |
(5.7.4) |
где Р - величина силы; d (t - t 0) - время, в течение которого эта сила действовала.
Тогда уравнение движения примет вид:
|
d 2 x |
+ 2γ ( |
dx |
) + Ω02 x = Pδ (t − t0 ). |
(5.7.5) |
|||||||
|
2 |
dt |
||||||||||
|
dt |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Необходимо учесть, что g |
|
h |
Ω 2 |
|
k |
|
||||||
= |
2 m |
и |
0 |
= |
n |
. |
|
|||||
В этом уравнении приняты обозначения: h - коэффициент сопротивления; k - коэффициент упругости; m - масса.
Учитывая, что Р = 1, можно найти уравнения для смещения системы под воздействием единичной импульсной функции Дирака:
192

x1 (t - t0 |
) = |
|
|
e−γ (t −t0 ) {cos W f (t - t0 ) - arctg0γ + |
0*mΩ f |
|
} = |
||
|
mΩ2f |
||||||||
|
|
|
|
|
−2 |
|
−1 |
|
|
|
|
e− |
1 |
sin W f (t - t0 ). |
|
|
(5.7.6) |
||
= |
1 |
2 m(t −t0 ) |
|
|
|
||||
mΩ f |
|
|
|
|
|||||
Теперь пусть на систему действует любая сила, причем ее будем рассматривать как последовательность следующих друг за другом ударов, а смещение системы под воздействием этой силы будем представлять как сумму элементарных смещений в результате каждого отдельного удара.
В момент t0 на систему действует ударная сила, импульс которой равен
¦(t 0)d t 0 . Очевидно, после этого удара система получит движение.
(t0 )x(t − t0 )dt . |
(5.7.7) |
Если допустить, что в момент t = t1, после которого сила начала действовать на систему, последняя находилась в состоянии
х 1 (t) и х 1 (t), |
(5.7.8) |
то движение системы можно записать в виде (используя принцип суперпозиции):
x(t) = x0 (t − t1 ) + ∫t (t0 ) x1 (t − t0 ) dt0
t1 |
, |
(5.7.9) |
|
где х0 (t - t1) - собственные колебания, определяемые начальными условиями.
Если для системы, на которую действует сила ¦(t) справедливо уравнение
(5.7.2), тогда смещение системы под воздействием ¦(t) в самом общем случае будет иметь вид:
x(t) = x0 (t − t1 ) + |
|
− |
|
t |
(t0 ) e |
ht0 |
|
|
ht |
||||||
1 |
|
∫ |
|
||||
2 m |
2 m |
||||||
mΩ f |
|
||||||
|
|
|
|
t1 |
|
|
|
* sin Ω f (t − t0 )dt
. (5.7.10)
Рассмотрим смещение системы под воздействием силы. Зададимся
193
нулевыми начальными условиями, тогда смещение системы может быть найдено из выражения:
t
1 |
|
−γt |
|
(t0 ) e |
γt |
|
* sin Ω f (t − t0 ) dt0 |
|
|
x( t) = |
|
* e |
|
∫ |
|
0 |
|
||
Ω f |
|
|
|
||||||
|
|
|
|
0 |
|
|
|
. |
(5.7.11) |
Приведенное решение справедливо для единичной массы и дает возможность подсчитать смещение любой точки колеблющейся системы.
Перепишем выражение для силы:
0 |
при t 0 < 0; |
|
¦ (t 0) = {1 - е-а t |
при 0 < t 0 < t ; |
(5.7.12) |
е-a(t -τ) - е-a t |
при t 0 > t. |
|
Тогда решение уравнения (5.7.2) в случае, когда его правая часть может быть представлена как (5.7.12), можно записать следующим образом, учитывая, что при экспериментальном исследовании характера колебаний осцилляторов может быть зафиксирована скорость смещения.
Ввиду того, что g достаточно мало, ею можно пренебречь при расчете огибающей смещения и скорости смещения в пределах нескольких периодов. Тогда для случая
x (t) = 0 при t< 0 |
(5.7.13) |
x(t) = e |
−γΩ f |
t a ( a −γ ) sin Ω f t −a cos Ω f t |
+ e |
|||
|
|
|
|
|
||
|
1+(γ −a ) 2 |
|
||||
|
|
|
|
|
|
|
Для промежутка времени |
0 < t £ t |
|||||
−aΩ f |
t |
a |
|
|
|
|
|
|
|
|
1+(γ −a ) 2 |
(5.7.14) |
||
|
|
|
. |
|
−γΩ f |
( t −τ ) |
|
a cos Ω f ( t −τ ) |
|
− aΩ f |
( t −τ ) |
|
−γΩ f t |
|
x(t) = e |
|
a(γ − a) sin Ω f |
(t − τ ) + |
|
|
− ae |
|
|
− e |
* |
|
1+(γ − a ) 2 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
194
|
|
a cos Ω f t |
|
ae− aΩ f t |
|
||
* a(a − γ )sin Ω f |
t − |
|
|
− |
|
|
|
1+(γ −a )2 |
1+(γ −a )2 |
|
|||||
|
|
|
|
|
. |
(5.7.15) |
|
|
|
|
|
|
|||
Последнее выражение приведено для скорости смещения, когда t > τ. Проанализируем решение уравнений (5.7.13), (5.7.14), (5.7.15), причем нас
будет интересовать форма огибающей смещения и скорости смещения. При расчете воспользуемся численными значениями γ = 0,03 и а = 16.
Под собственной частотой будем подразумевать частоту первой моды колебаний как в случае моночастотной системы, так и в случае системы с частичным вырождением частот мод колебаний. На рис. 5.7.1 показаны огибающие смещения, скорости смещения, а также возбуждающий импульс, когда его длительность
τ = Т = 2π/Ω¦
На рис. 5.7.1 приведены аналогичные кривые, когда длительность возбуждающего импульса равна
τ = 2Т = 4π/Ω¦ и τ = 6π/Ω¦ =3Т.
Как видно из приведенных кривых, при воздействии на пьезодиск прямоугольным П-импульсом, он совершает колебательный процесс, причем длительность последнего существенно зависит от длительности возбуждающего импульса или спектра импульса возбуждения.
При длительности возбуждающего импульса, равной
τ = nТ,
где n = 1,2,3, . . .- огибающая смещения и скорости смещения представляют отрезки синусоид, равные соответственно одному, двум, трем и так далее периодам частоты первой моды колебаний.
Спектры упругих импульсов различной длительности приведены на рис. 5.7.2. Полученные результаты были использованы при разработке раздельносовмещенного пьезоэлектрического преобразователя продольных волн. Для возбуждения симметричной и антисимметричной волн Лэмба были
195
сконструированы и изготовлены пьезоэлектрические излучатели, содержащие призмы из оргстекла для наклонного ввода упругих колебаний. Причем, для возбуждения короткого импульса изгибной волны угол падения определялся из условия:
sin β = υo/υph,
Где: υ - скорость звука во внешней среде, υph – фазовая скорость изгибной волны. Аналогичным способом определялся угол ввода для Sо – моды.
196
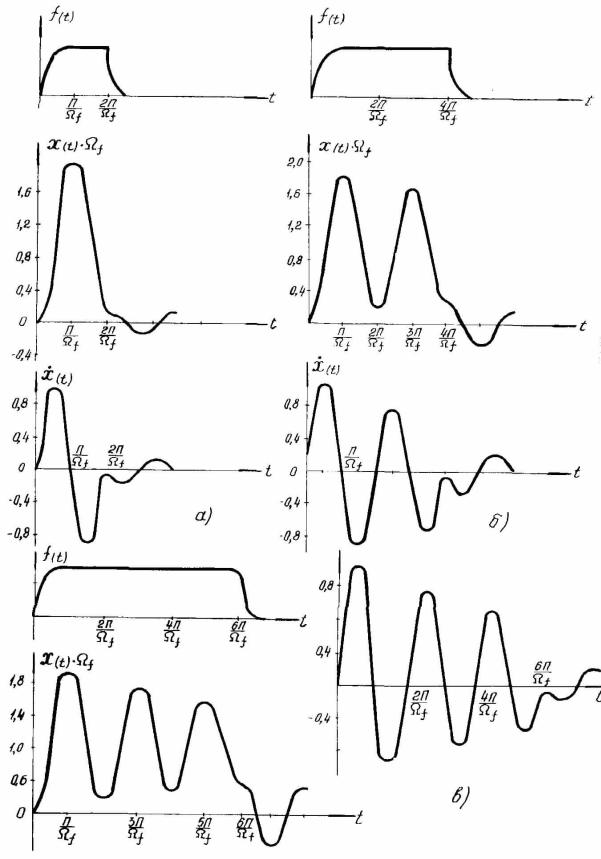
Рис. 5.7.1. Характер изменения смещения и скорости смещения
при различных длительностях электрического П-импульса
197
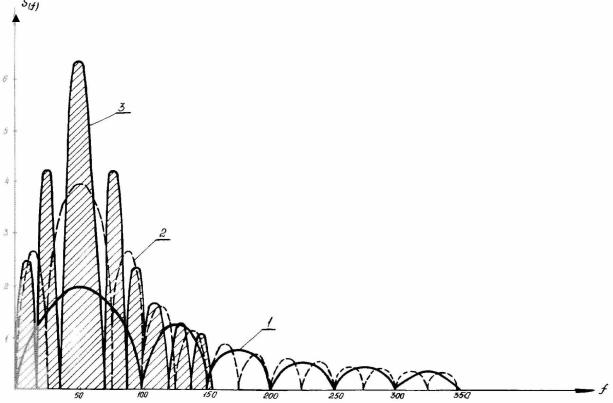
Рис. 5.7.2. Спектры частот упругих импульсов при различной их
длительности, рассчитанные теоретически: 1 – длительность импульса, равная одному периоду; 2 – двум периодам; 3 – трем периодам
5.8. Раздельные пьезоэлектрические преобразователи на основе прямоугольных пластин
Представляют практический интерес пьезопреобразователи на основе прямоугольных пластин с частичным вырождением мод колебаний [10].
Рассмотрим пьезоэлектрический преобразователь, который изготовлен из пластин дигидрофосфата аммония 45о z-среза. Частоты мод колебаний имеют кратные значения, если отношение сторон прямоугольной пластины, расположенной в плоскости хоу, равно 0,5. Указанное отношение сохраняется и для тонких пластин, совершающих контурные колебания, вырезанных из монокристаллов дигидрофосфата калия (КДР), генетовой соли и других пьезоматериалов.
198