

Модель 6
Найдем коэффициенты:




 (кривая 6,рис.2)
(кривая 6,рис.2)
Модель 7
 с.
с. с.
с.
 (кривая 7,рис.2)
(кривая 7,рис.2)
Погрешность аппроксимации
Для кривой 2

Для кривой 4
Для кривой 6

Для кривой 7
В качестве окончательной выбираем передаточную функцию ОУ, имеющую наименьшую погрешность аппроксимации:

2. Выбор пи-алгоритма управления и расчет параметров
В качестве показателя оптимальности АСР принимается минимум интеграла от квадрата ошибки системы при действии на объект наиболее тяжелого ступенчатого возмущения по регулирующему каналу (интегральный квадратичный критерий) с учетом добавочного ограничения на запас устойчивости системы, т.е.
 . (2.1)
. (2.1)
Такой критерий допускает значительное
перерегулирование
 и увеличивает время регулирования, но
он обеспечивает наименьшее максимальное
динамическое отклонение регулируемой
величины.
и увеличивает время регулирования, но
он обеспечивает наименьшее максимальное
динамическое отклонение регулируемой
величины.
При практических расчётах запас устойчивости удобно характеризовать показателем колебательность системы М, значение которого в САУ, имеющих интеграл в алгоритме управления, совпадает с максимумом амплитудно-частотной характеристики системы:
 (2.2)
(2.2)
где:р- резонансная частота, на которой Аз() имеет максимум.
Чтобы максимум не превышал некоторой заданной величины М, амплитудно-фазовая характеристика (АФХ) разомкнутой системы Wраз(j) не должна заходить внутрь «запретной» области ограниченной окружностью, центр uoи радиус Roкоторой определяется через М формулами (2.3) и (2.4), (рис.4):
 (2.3)
(2.3)
 . (2.4)
. (2.4)
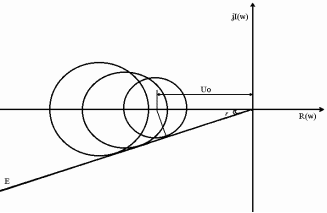
Рис.4. Определение центра и радиуса окружности, соответствующей заданному показателю колебательности М
Если же Wраз(j) касается указанной окружности, то это означает, что САУ находится на границе заданного запаса устойчивости.
На практике чаще всего принимают
 .
При этом в САУ перерегулирование30%, максимальное
отклонение регулируемого параметра
при внутренних возмущениях (возмущениях
по регулирующему воздействию) не
превышает 10%.
.
При этом в САУ перерегулирование30%, максимальное
отклонение регулируемого параметра
при внутренних возмущениях (возмущениях
по регулирующему воздействию) не
превышает 10%.
Рассчитаем ПИ-алгоритм управления, передаточная функция которого имеет вид:
 ,
(2.5)
,
(2.5)
параметрами, подлежащими определению, являются коэффициент усиления Кри постоянная интегрирования Ти, для этого используем графо-аналитический метод.
1. По АФХ объекта Wобu-y (jω) (см. приложение 2) строим семейство характеристик разомкнутой системы Wраз(jω) для Кр=1 и нескольких фиксированных значений постоянной интегрирования Ти.

 Для
начала выберем значение Ти=0,6,
(первое значение возьмем как минимум
суммы всех постоянных времени передаточной
функции Wобu-y(р))
На АФХ
объекта отметим несколько точек А1,
А2…А7 и отметим значение
частоты ω в каждой из них, для точки А1
: ω1=0,497 1/с.
Из начала координат проведем вектор
ОА1и измерим его длину в мм:
|ОА1|=36,5 мм. После к точке А1
пристроим вектор
Для
начала выберем значение Ти=0,6,
(первое значение возьмем как минимум
суммы всех постоянных времени передаточной
функции Wобu-y(р))
На АФХ
объекта отметим несколько точек А1,
А2…А7 и отметим значение
частоты ω в каждой из них, для точки А1
: ω1=0,497 1/с.
Из начала координат проведем вектор
ОА1и измерим его длину в мм:
|ОА1|=36,5 мм. После к точке А1
пристроим вектор повернутый на 90˚ по отношению к вектору
ОА1, длину вектора
повернутый на 90˚ по отношению к вектору
ОА1, длину вектора найдем по формуле
найдем по формуле
 (где
(где - длина вектора АФХ объекта для значения
частотыi(в
мм); в знаменателе – произведение
указанной частоты на фиксированное
значение Ти=3), таким образом
- длина вектора АФХ объекта для значения
частотыi(в
мм); в знаменателе – произведение
указанной частоты на фиксированное
значение Ти=3), таким образом =36,5/0,6*0,497=122,4.
Аналогичные операции проделываем для
остальных точек Аi,
результаты вычислений представлены в
таблице 2.
=36,5/0,6*0,497=122,4.
Аналогичные операции проделываем для
остальных точек Аi,
результаты вычислений представлены в
таблице 2.
Таблица 2
|
Отрезок OAi |
Длина ОАi, мм |
Частота, 1/с |
Длина
|
Длина
|
Длина
|
|
|
|
ОА1 |
3б,5 |
0,497 |
122,4 |
45,9 |
56 |
|
|
|
ОА2 |
22,5 |
0,7 |
53,57 |
32,14 |
20 |
|
|
|
ОА3 |
20 |
1,049 |
31,7 |
19 |
11,9 |
|
|
|
ОА4 |
12,5 |
1,902 |
10,95 |
6,57 |
4,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 ,при
T=0,6мм
,при
T=0,6мм ,при
T=1мм
,при
T=1мм ,при
T=1,6,мм
,при
T=1,6,мм
Через полученные точки С1, С2,…, С7проводим плавную кривую, которая является характеристикой Wраз3(jω) для выбранного значения Ти=0,6.
2. Из начала координат проводим прямую ОЕ под углом , характеризующим запас устойчивости по фазе и определяемым как:
 . (2.6)
. (2.6)
3. С помощью циркуля строим окружность с центром на отрицательной вещественной полуоси, каждая из которых касается одновременно как прямой ОЕ, так и характеристики Wраз3(jω).Отметим значение радиуса полученной окружности-r=49 мм.
4. Определяем Кр по формуле:
 , (2.7)
, (2.7)
где: μ – масштабный коэффициент равный 0,02
Rо– радиус, определяемый по формуле (2.3);
r – радиус окружности, находящийся методом подбора;
kp=1,026/49*0,02=1,34
Проделаем аналогичные операции для различных значений Ти.
Все результаты вычислений представлены в таблице 3:
Таблица 3
|
Кр |
1,047 |
2,23 |
3,109 |
|
|
|
Ти |
1 |
1,5 |
2 |
|
|
5. В результате в плоскости варьируемых параметров алгоритма Кри Тистроится граница области заданного запаса устойчивости (приложение 2).
Максимум отношения Кр/Ти, определяющего оптимальную настройку регулятора при низкочастотных возмущениях, соответствует точке пересечения касательной с границей заданного запаса устойчивости, проведённой через начало координат.
Передаточная функция регулятора, после определения координат точки А (Кр.опт = 2,35 и Ти опт = 1,04), имеет вид:
 (2.8)
(2.8)