

Задача 13
Методом вращения вокруг оси, параллельной плоскости проекций, определить истинную величину плоской фигуры.
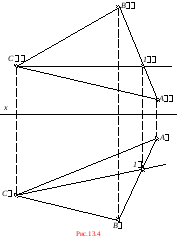
1. Для нахождения истинной величины заданного треугольника ABCповернем его вокруг горизонтали в положение, параллельное плоскости проекций1, тогда горизонтальная проекция фигуры будет представлять собой ее истинную величину.
2. В плоскости ABC, например, через точкуCпроводим горизонтальC1(рис.13.4):
C1 x; 1 AB.
Эту горизонталь принимаем за ось вращения. Точки, в том числе и вершина Стреугольника, оказавшиеся на оси вращения, при вращении своего положения не меняют:
CС.
3. Проводим плоскость вращения γ1точкиВ(рис.13.5):
горизонтальный след плоскости вращения
![]() проходит черезBи перпендикуляренC1(эта плоскость является
горизонтально-проецирующей; фронтальный
след плоскости вращения для решения
задачи не используется и на чертеже он
не указан).
проходит черезBи перпендикуляренC1(эта плоскость является
горизонтально-проецирующей; фронтальный
след плоскости вращения для решения
задачи не используется и на чертеже он
не указан).
4. Определяем проекции центра вращения точки В(ОВ) в пересечении плоскости вращения и оси вращения:
![]() =
=![]() C1;
C1;
![]() С1.
С1.
5. Радиус вращения точки Вна
горизонтальную (![]() В)
и фронтальную (
В)
и фронтальную (![]() В)
плоскости проекций спроецирован с
искажением. Определяем истинную величину
радиуса вращения точкиВ(RB)
методом прямоугольного треугольника,
одним катетом которого является
горизонтальная проекция радиуса вращения
В)
плоскости проекций спроецирован с
искажением. Определяем истинную величину
радиуса вращения точкиВ(RB)
методом прямоугольного треугольника,
одним катетом которого является
горизонтальная проекция радиуса вращения![]() В,
а другим катетом расстояние, равное
алгебраической разности координатzВ.
В,
а другим катетом расстояние, равное
алгебраической разности координатzВ.
6. Определяем
горизонтальную проекцию нового положения
вершины В
(В).
На пересечении дуги окружности радиусом
RB,
проведенной из
![]() ,
и следа плоскости вращения
,
и следа плоскости вращения![]() отмечаемВ:
отмечаемВ:
В![]()
![]() =RВ.
=RВ.

![]() (рис.13.6).
(рис.13.6).
8. Соединив точки
![]() ,
,![]() и
и![]() ,
получаем истинную величину заданного
треугольника.
,
получаем истинную величину заданного
треугольника.
Задача 14
По истинной величине плоской фигуры, принадлежащей плоскости и вписанной в окружность радиуса R с заданным центром О, построить ее проекции. Задачу решить способом совмещения.
14.1. Плоскость общего положения (рис.14.1)
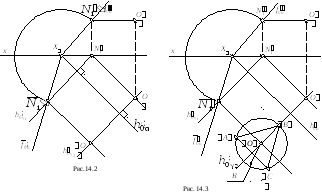
1. Через точку Опроводим горизонталь плоскостии определяем положение горизонтальной проекции точкиО(О) (рис.14.2) – см. задачу 4.
2. Совместим плоскость с горизонтальной плоскостью проекций
путем ее вращения вокруг следа
![]() .
След
.
След
![]() ,
как ось вращения, своего положения не
меняет; точка схода следовXтакже не изменяет своего положения.
Поэтому для построения нового положения
фронтального следа
,
как ось вращения, своего положения не
меняет; точка схода следовXтакже не изменяет своего положения.
Поэтому для построения нового положения
фронтального следа![]() плоскости,
совмещенного с плоскостью1,
достаточно найти одну точку этого следа
в совмещенном положении.
плоскости,
совмещенного с плоскостью1,
достаточно найти одну точку этого следа
в совмещенном положении.
Совместим с плоскостью 1точкуN1(N1![]() ).
Проведем плоскость вращения1точкиN1:
).
Проведем плоскость вращения1точкиN1:
![]()
![]() ;
;
![]()
![]() .
.
Новая проекция
![]() находится на пересечении дуги окружности
радиусаX
находится на пересечении дуги окружности
радиусаX![]() со следом плоскости вращения
со следом плоскости вращения
![]() .
.
![]() иXпроведем
совмещенное с горизонтальной плоскостью
проекций положение фронтального
следа плоскости
иXпроведем
совмещенное с горизонтальной плоскостью
проекций положение фронтального
следа плоскости![]() .
.
4. Совместим с
плоскостью 1
горизонталь N1O,
которая в совмещенном положении будет
проходить через![]() параллельно горизонтальному следу
параллельно горизонтальному следу
![]() .
.
О![]() ;
;
![]()
![]() .
.
Проекция совмещенного положения точки
О(О)
находится в пересечении нового положения
горизонтали, проведенной из![]() ,
со следом плоскости вращения
,
со следом плоскости вращения
![]() .
.
6. Строим окружность радиусом Rс центром в точкеОи вписываем в нее заданную фигуру (рис.14.3). Поскольку в условии задачи не оговаривается ориентация многоугольника,положение его вершин выбираем произвольно. Это положение целесообразно выбрать таким, чтобы хотя бы две вершины многоугольника находились на одной горизонтали, так как при этом упрощаются дальнейшие построения.
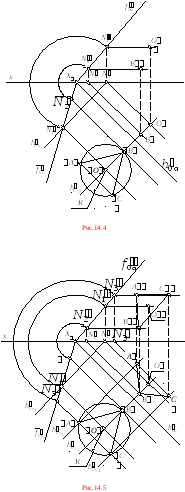
7. Поворачиваем плоскость вместе с АВС в исходное положение. Обратным ходом строим проекции вершин заданной фигуры. Рассмотрим построения на примере вершины В (рис.14.4).
ЧерезВ проводим совмещенное с плоскостью 1 положение горизонтали:
В![]()
![]() .
.
На фронтальном следе
![]() находим положение
находим положение
![]() и на осих–
и на осих–
![]() .
Строим фронтальную проекцию горизонтали
(из
.
Строим фронтальную проекцию горизонтали
(из
![]() x)
и горизонтальную проекцию горизонтали
(из
x)
и горизонтальную проекцию горизонтали
(из
![]()
![]() ).
).
Точка Ввращается в той же плоскости,
что и точкаО, и ее след
![]() уже имеется на чертеже. Находим положениеВв пересечении
горизонтальной проекции горизонтали
и следа плоскости вращения
уже имеется на чертеже. Находим положениеВв пересечении
горизонтальной проекции горизонтали
и следа плоскости вращения
![]() .
По горизонтальной проекцииВстроим ее фронтальную проекциюВ.
.
По горизонтальной проекцииВстроим ее фронтальную проекциюВ.
8. Аналогично строим проекции вершин АиС(рис.14.5) и соединяем одноименные проекции вершин. ТреугольникАВС– горизонтальная проекцияАВС,АВС– его фронтальная проекция.