

1.2. Симплекс-метод
1.2.1. Геометрическая интерпретация
Геометрическое истолкование симплекс-метода наиболее просто может быть проиллюстрировано в случае двух переменных.
Положение 1.
Каждое неравенство
![]() с
двумя переменнымиx1иx2определяет полуплоскость в системе
координатx10x2.
с
двумя переменнымиx1иx2определяет полуплоскость в системе
координатx10x2.
Положение 2.
В случае, когда задана система неравенств
|
|
(1.10) |
то она определяет многоугольную область Dна плоскости, которая является результатом пересеченияm полуплоскостей. ОбластьDназываетсяобластью решенийсистемы неравенств. ОбластьDможет быть ограниченной, неограниченной или пустой. Область решений D обладает важным свойством – она является выпуклой.
Определение 1.Область называется выпуклой, если она вместе с любыми двумя точками содержит весь отрезок их соединяющий.
Определение 2.Прямая называется опорной по отношению к области, если:
имеет с областью по крайней мере одну общую точку;
вся область лежит по одну сторону от этой прямой.
Положение 3. Пусть задана линейная функция
|
|
(1.11) |
Для каждой точки плоскости в системе координат x10x2. функцияFпринимает фиксированное значениеF=F1.
Определение 3. Множество точек, в которых функция двух переменных принимает фиксированное значение, называетсялинией уровня.
Линия уровня для
линейной функции – прямая, которая
определяется уравнением
![]() .
ПридаваяF1различные значения,
получим различные линии уровня.
.
ПридаваяF1различные значения,
получим различные линии уровня.
Все линии уровня (для линейной функции) параллельны между собой.
Нормаль к линии уровня определяется через градиент функции. Градиент произвольной функции двух переменных f(x1,x2) может быть вычислен по формуле
|
|
(1.12) |
поэтому
градиент линейной функции определяется
уравнением
![]() ,
т.е. градиент может быть задан вектором
,
т.е. градиент может быть задан вектором![]() ,
выходящим из начала координат.
,
выходящим из начала координат.
Градиент указывает направление наибыстрейшего роста функции в данной точке.
Положение 4.Графическое решение задачи ЛП, определяемой
фазовыми ограничениями (1.10),
естественными ограничениями и целевой
функцией (1.11), основано на мысленном
эксперименте по перемещению линии
уровня относительнообласти допустимых
решений D.Область допустимых
решений D задачи ЛП– это
множество точек, координаты которых
удовлетворяют фазовым и естественным
ограничениям. Допустим, множествоDограничено. Пусть при движении прямойF1в положительном направлении
вектора![]() она впервые встретится с многоугольником
решений в его вершине, тогда в этом
положении прямаяF1становится
опорной, и на этой прямой функцияFпринимает наименьшее значение. При
дальнейшем движении в том же направлении
прямаяF1пройдет через
другую вершину многоугольника решений
(выходя из области решений), и станет
также опорной прямой; на ней функцияFпринимает наибольшее значение среди
всех значений, принимаемых на многоугольнике
решений.
она впервые встретится с многоугольником
решений в его вершине, тогда в этом
положении прямаяF1становится
опорной, и на этой прямой функцияFпринимает наименьшее значение. При
дальнейшем движении в том же направлении
прямаяF1пройдет через
другую вершину многоугольника решений
(выходя из области решений), и станет
также опорной прямой; на ней функцияFпринимает наибольшее значение среди
всех значений, принимаемых на многоугольнике
решений.
Таким образом,
максимизация линейной функции
![]() на многоугольнике решений достигается
в точке пересечения этого многоугольника
с опорными прямыми, перпендикулярными
вектору
на многоугольнике решений достигается
в точке пересечения этого многоугольника
с опорными прямыми, перпендикулярными
вектору![]() .
.
Положение 5.Существование решения и количество решений задачи ЛП основано на анализе взаимного расположения области допустимых решенийDи линии уровня.
Если область Dограничена, то возможны два варианта:
А) опорная прямая имеет с многоугольником одну общую точку – одно решение;
Б) опорная прямая параллельна стороне многоугольника (на которой достигается максимум) – множество решений (вся сторона многоугольника).
Если область Dне ограничена, то возможны три варианта:
А) опорная прямая имеет с многоугольником одну общую точку – одно решение;
Б) опорная прямая параллельна стороне многоугольника (на которой достигается максимум) – имеется множество решений;
В) не существует опорной прямой (в направлении роста функции) - множество решений пусто (нет решений).
Пример 2.
Решить графически задачу ЛП (1.13)-(1.15).
|
|
(1.13) |
|
|
(1.14) |
|
|
(1.15) |
Решение
Построим область допустимых решений.
Первое неравенство
системы (1.14) задает полуплоскость,
границей которой является прямая y1,
определяемая равенством![]() .
Построим эту прямую на координатной
плоскостиx10x2(рис.1.1), искомой полуплоскостью (она
заштрихована) будет, та, которая лежит
выше этой прямой.
.
Построим эту прямую на координатной
плоскостиx10x2(рис.1.1), искомой полуплоскостью (она
заштрихована) будет, та, которая лежит
выше этой прямой.
Второе неравенство
задает полуплоскость, границей которой
является прямая y2, определяемая
равенством![]() .
Также построим прямуюy2на
координатной плоскости и заштрихуем
соответствующую полуплоскость.
.
Также построим прямуюy2на
координатной плоскости и заштрихуем
соответствующую полуплоскость.
Аналогично построим
полуплоскости, соответствующие
неравенствам три и четыре, их границы
y3иy4, определяются
уравнениями![]() и
и![]() соответственно.
соответственно.
Пересечение этих четырех плоскостей и плоскостей естественных ограничений определяют область допустимых решений D.
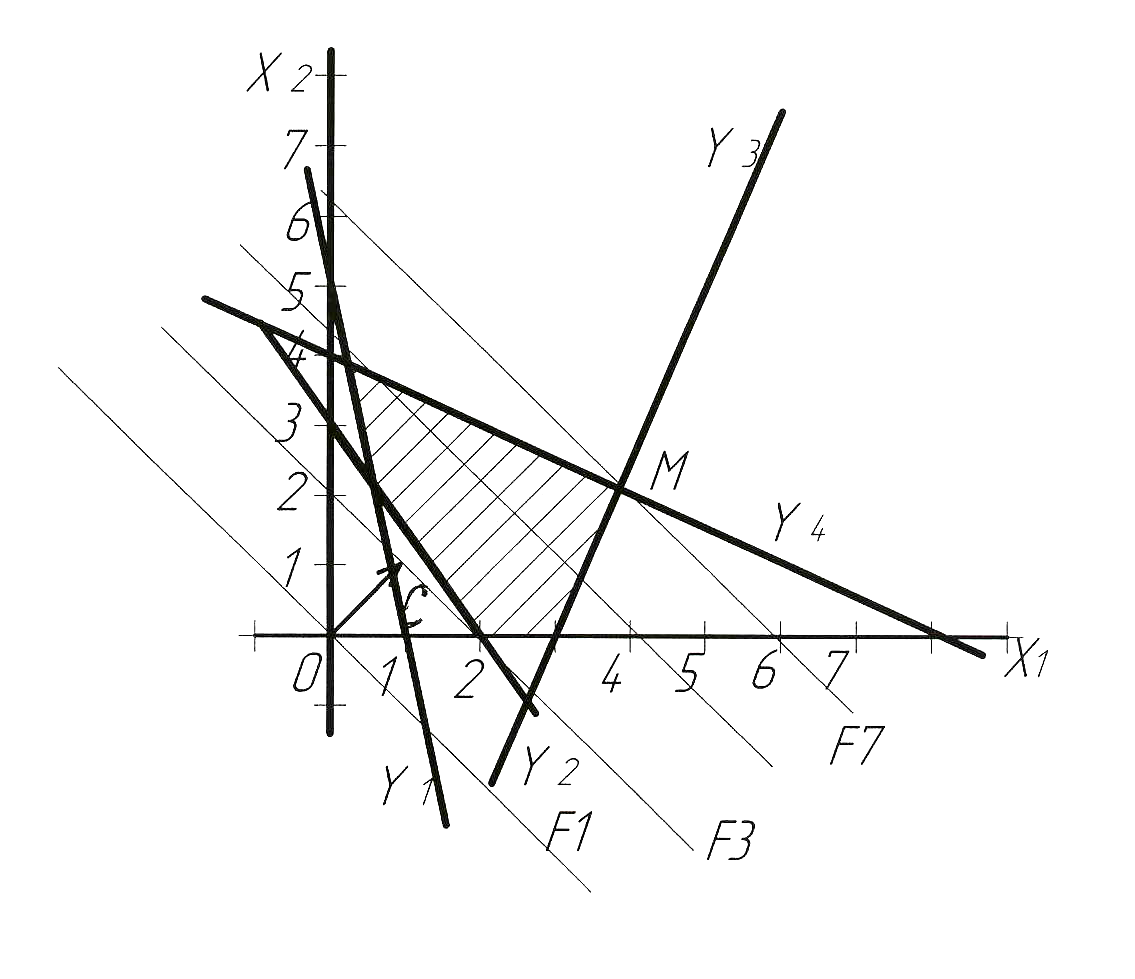
Рис. 1.1
Построим вектор-градиент
![]() из начала координат. Проведем линию
перпендикулярно вектору
из начала координат. Проведем линию
перпендикулярно вектору![]() .
ЛинияF1, проходящая через начало
координат, соответствует значению 1,
поскольку
.
ЛинияF1, проходящая через начало
координат, соответствует значению 1,
поскольку![]() . Мысленно сдвинем линию уровня в
направлении вектора
. Мысленно сдвинем линию уровня в
направлении вектора![]() .
Первое касание многоугольника Dсоответствует положениюF3. Эта линия
является опорной, и ей соответствует
минимальное значение, которое достигается
на множестве допустимых решений.
Продолжим движение линии уровня до
выхода из множестваD. Этому положению
соответствует положениеF7. Рассмотрим
крайнюю точкуM, которая является
точкой пересечения прямыхy3 иy4, ее координаты можно определить
как решение линейной системы.
.
Первое касание многоугольника Dсоответствует положениюF3. Эта линия
является опорной, и ей соответствует
минимальное значение, которое достигается
на множестве допустимых решений.
Продолжим движение линии уровня до
выхода из множестваD. Этому положению
соответствует положениеF7. Рассмотрим
крайнюю точкуM, которая является
точкой пересечения прямыхy3 иy4, ее координаты можно определить
как решение линейной системы.
Решением системы является пара чисел x1=4x2=2. Этому решению соответствует искомое максимальное значение линейной функции
![]() .
.
Таким образом, Fmax=7 приx1=4x2=2.
Вывод.В данном случае линейная функция достигает своего максимального значения в вершине множества решений.
Пример 3.
Решить графически задачу ЛП (1.16) – (1.18).
|
|
(1.16) |
|
|
(1.17) |
|
|
(1.18) |
Решение
Заметим, что система фазовых ограничений (1.17) совпадает с системой (1.14). Поэтому область допустимых решений Dбудет той же самой, что и в примере 2 (рис.1.2).
Построим вектор-градиент
![]() из начала координат. Проведем линию
перпендикулярно вектору
из начала координат. Проведем линию
перпендикулярно вектору![]() .
ЛинияF1, проходящая через начало
координат, соответствует значению 1,
поскольку
.
ЛинияF1, проходящая через начало
координат, соответствует значению 1,
поскольку![]() .
Мысленно сдвинем линию уровня в
направлении вектора
.
Мысленно сдвинем линию уровня в
направлении вектора![]() .
Первое касание многоугольника
соответствует положениюF3 . Эта
линия является опорной, и ей соответствует
минимальное значение, которое достигается
на множестве допустимых решений.
Продолжим движение линии уровня до
выхода из множестваD,. этому положению
соответствует положениеF8 . Заметим,
что линия уровня параллельна сторонеMN, поэтому решением является множество
точек лежащих между крайними точкамиMиN, ТочкаMявляется
точкой пересечения прямыхy3иy4, ее координаты можно
определить как решение линейной системы.
.
Первое касание многоугольника
соответствует положениюF3 . Эта
линия является опорной, и ей соответствует
минимальное значение, которое достигается
на множестве допустимых решений.
Продолжим движение линии уровня до
выхода из множестваD,. этому положению
соответствует положениеF8 . Заметим,
что линия уровня параллельна сторонеMN, поэтому решением является множество
точек лежащих между крайними точкамиMиN, ТочкаMявляется
точкой пересечения прямыхy3иy4, ее координаты можно
определить как решение линейной системы.
Решением этой системы является пара чисел x1=4,x2=2. Эта пара чисел определяет координаты точкиМи в ней достигается искомое максимальное значение линейной функции, равное
![]() .
.
Таким образом, Fmax=9, приx1=4,x2=2.
Точка Nявляется точкой пересечения прямыхy1иy4; ее координаты можно определить как решение линейной системы


Рис.1.2
Решением полученной системы является пара чисел x1=2/9,x2=35/9, которые определяют координаты точкиN, значение целевой функции в которой равно
![]() .
.
Таким образом, значение в точке Nсовпадает со значением в точкеM.Fmax=9, приx1=2/9,x2=35/9.
Координаты всех точек, лежащих между MиNможно записать в виде
![]()
Значение функции во всех этих точках равно 9.
Вывод.В данном случае линейная функция достигает своего максимального значения во всех точках ребраMNмножества решенийD.
Пример 4.
Решить графически задачу ЛП (1.19) – (1.21).
|
|
(1.19) |
|
|
(1.20) |
|
|
(1.21) |
Решение.
Построим область допустимых решений D(рис. 1.3).
Построение области аналогично примеру 2, но в этом построении отсутствует прямая y4.
Пересечение трех полуплоскостей с учетом естественных ограничений определяет неограниченную область допустимых решений D.
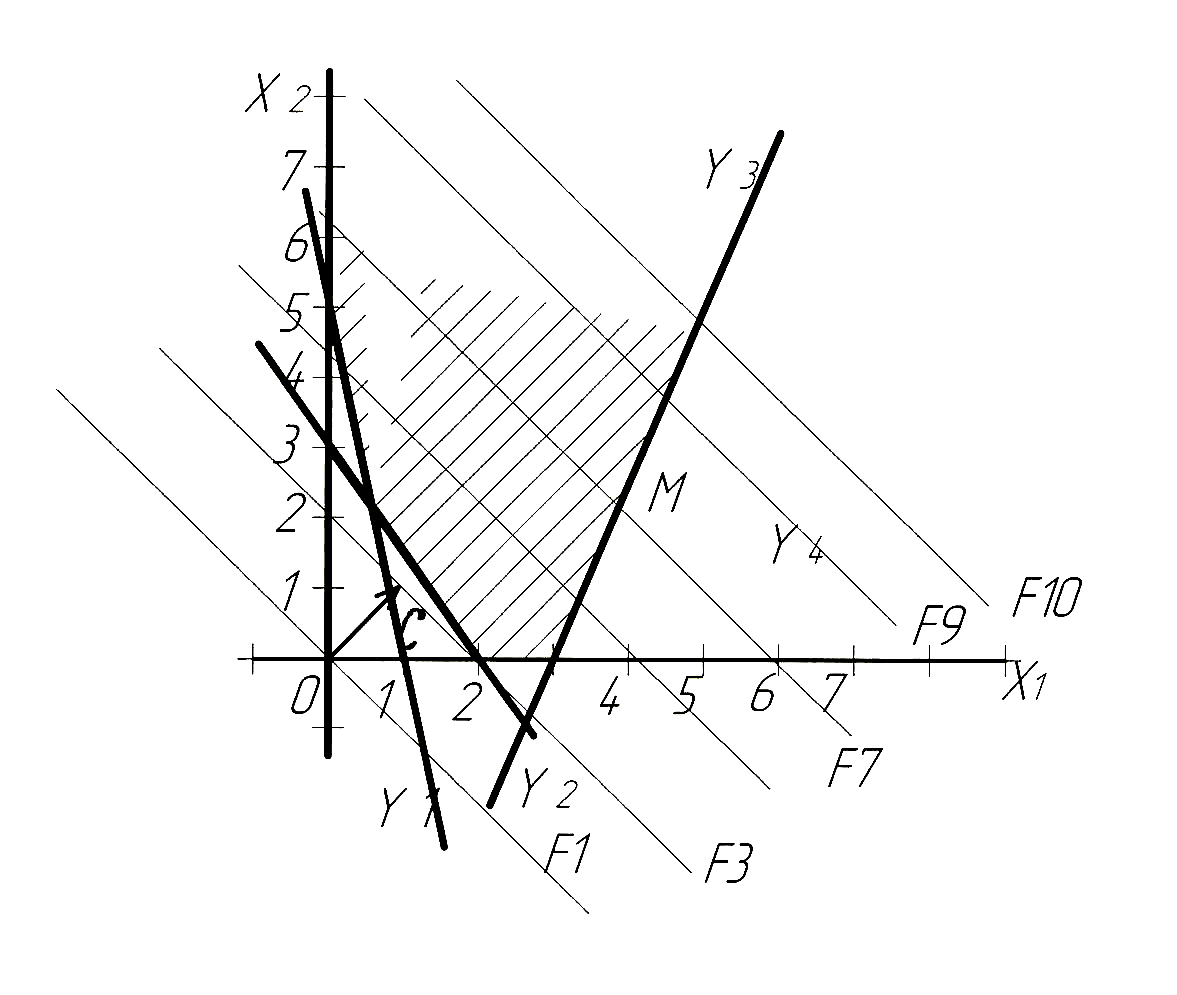
Рис. 1.3
Построим вектор-градиент
![]() из начала координат. Проведем линию
перпендикулярно вектору–
из начала координат. Проведем линию
перпендикулярно вектору–![]() .
ЛинияF1, проходящая через начало
координат, соответствует значению 1,
поскольку
.
ЛинияF1, проходящая через начало
координат, соответствует значению 1,
поскольку![]() .
.
Мысленно сдвинем
линию уровня в направлении вектора ![]() .
Первое касание многоугольника
соответствует положениюF3. Эта линия
является опорной, и ей соответствует
минимальное значение, которое достигается
на множестве допустимых решений. Заметим,
что многогранник незамкнут в направлении
роста целевой функции, поэтому целевая
функция не имеет максимума. Это объясняется
тем, что для любой линии уровня найдется
другая линия уровня, лежащая в направлении
вектора
.
Первое касание многоугольника
соответствует положениюF3. Эта линия
является опорной, и ей соответствует
минимальное значение, которое достигается
на множестве допустимых решений. Заметим,
что многогранник незамкнут в направлении
роста целевой функции, поэтому целевая
функция не имеет максимума. Это объясняется
тем, что для любой линии уровня найдется
другая линия уровня, лежащая в направлении
вектора![]() ,
которой соответствует большее значение
функции.
,
которой соответствует большее значение
функции.
Вывод.Целевая функция не ограничена, если многогранник незамкнут в направлении роста целевой функции.
Пример 5.
Решить графически задачу ЛП (1.22) – (1.24).
|
|
(1.22) |
|
|
(1.23) |
|
|
(1.24) |
Решение
Построим область допустимых решений D(рис. 1.4), она совпадает с областью в примере 3.
Заметим, что
вектор-градиент
![]() направлен в противоположную сторону
(по сравнению с рис. 1.3). Максимум
достигается в единственной точке Р,
являющейся точкой пересечения осиx1
и прямойy2.
направлен в противоположную сторону
(по сравнению с рис. 1.3). Максимум
достигается в единственной точке Р,
являющейся точкой пересечения осиx1
и прямойy2.
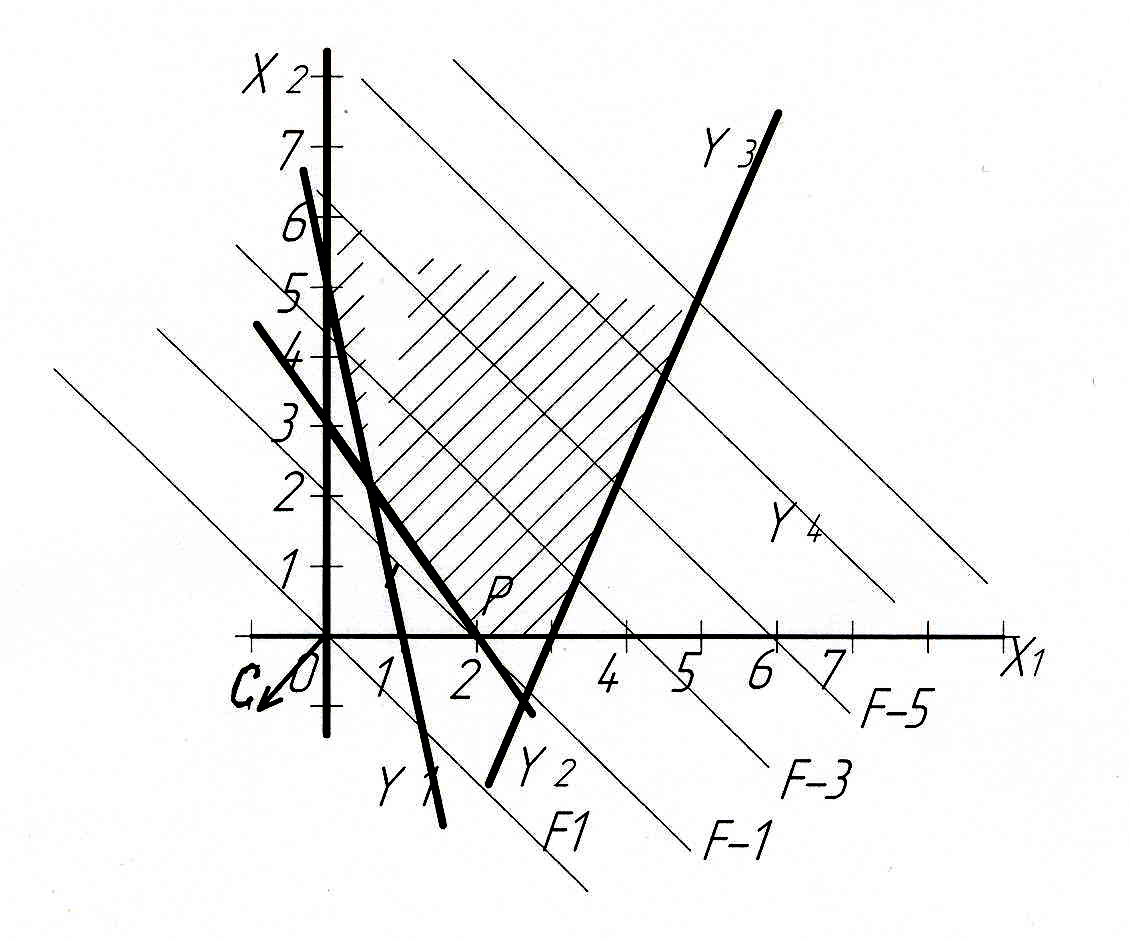
Рис. 1.4
Координаты точки Рможно определить, решив систему уравнений:
Ее решение x1=2,x2=0, значение функции в
этой точке равно![]()
Вывод.Задача ЛП имеет решение, когда многогранник замкнут в направлении роста целевой функции.
Рассмотренные примеры иллюстрируют четыре варианта Положения 5.