

1. Исходные данные для выполнения лабораторной работы Лабораторная работа «Кинематический анализ механизма»
Схема
кривошипно-ползунного механизма
приведена на рис. 1. Точка С
является центром масс шатуна и расположена
посередине его длины, т.е.
![]() .
.
Требуется:
построить траектории движения точек
 ,
, ,
, за один полный поворот кривошипа;
за один полный поворот кривошипа;определить скорости и ускорения заданных точек механизма;
исследовать изменение скоростей и ускорений заданных точек механизма.
Механизм обязательно имеет неподвижные1, 5,ведущее2 иведомые3, 4 звенья (рис. 1).
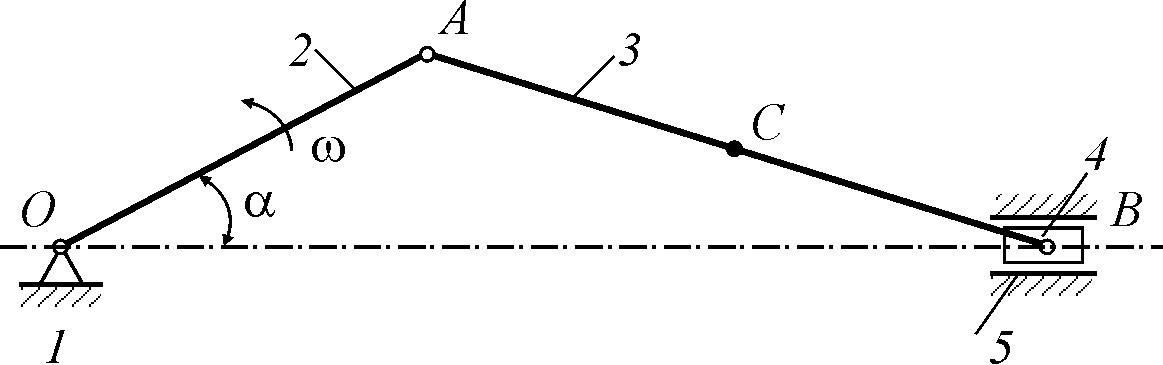
Рис. 1.Кривошипно-ползунный механизм
Исходными данными являются:
![]() – угол
поворота кривошипа в исходном положении,
град;
– угол
поворота кривошипа в исходном положении,
град;
![]() –длина
кривошипа, м;
–длина
кривошипа, м;
![]() –отношение
длины кривошипа к длине шатуна;
–отношение
длины кривошипа к длине шатуна;
![]() – угловая
скорость вращения кривошипа, с-1.
– угловая
скорость вращения кривошипа, с-1.
Исходные данные выбираются из табл. 1 в соответствии с учебным шифром, которым является набор из трех последних цифр студенческого билета (зачетной книжки). Например, для студенческого билета № 22041/06, учебный шифр – число 041, где цифры 0, 4 и 1 составляют соответственно первую, вторую и третью цифру учебного шифра. Для рассматриваемого учебного шифра исходными данными для выполнения лабораторной работы будут являться следующие величины:
![]() ;
; ![]() м;
м;![]() ;
;![]() с-1.
с-1.
Таблица 1.
|
Первая цифра шифра |
|
Вторая цифра шифра |
|
Третья цифра шифра |
|
|
|
0 |
30 |
0 |
0,08 |
0 |
0,27 |
30 |
|
1 |
45 |
1 |
0,10 |
1 |
0,31 |
35 |
|
2 |
60 |
2 |
0,16 |
2 |
0,34 |
40 |
|
3 |
120 |
3 |
0,18 |
3 |
0,26 |
45 |
|
4 |
150 |
4 |
0,13 |
4 |
0,32 |
50 |
|
5 |
135 |
5 |
0,15 |
5 |
0,40 |
55 |
|
6 |
210 |
6 |
0,20 |
6 |
0,35 |
25 |
|
7 |
225 |
7 |
0,12 |
7 |
0,30 |
20 |
|
8 |
240 |
8 |
0,22 |
8 |
0,25 |
15 |
|
9 |
300 |
9 |
0,24 |
9 |
0,28 |
10 |
2. Методические указания к выполнению лабораторной работы
2.1. Построение траектории движения точек за один полный поворот кривошипа
На листе миллиметровой бумаги формата А4 в масштабе строится механизм в заданном положении (рис. 2), а затем в 8 или 12 положениях ведущего звена в зависимости от исходных данных.
Если заданный угол
![]() кратен
кратен![]() ,
то строится
,
то строится![]() положений точки
положений точки![]() (через каждые
(через каждые![]() ).
Если заданный угол кратен
).
Если заданный угол кратен![]() ,
то строится
,
то строится![]() положений точки
положений точки![]() (через каждые
(через каждые![]() ).
).
Поскольку
длина шатуна
![]() величина
постоянная, а точка
величина
постоянная, а точка
![]() всегда
перемещается по горизонтальной оси, то
для каждого положения точки
всегда
перемещается по горизонтальной оси, то
для каждого положения точки
![]() графическим
путем определяется соответствующее
положение точки
графическим
путем определяется соответствующее
положение точки
![]() .На рис. 2 показано построение первых
двух положений механизма при заданном
угле
.На рис. 2 показано построение первых
двух положений механизма при заданном
угле![]() .
.
Приработе механизма траекторией точки![]() будет окружность радиуса
будет окружность радиуса![]() ,
а траекторией движения точки
,
а траекторией движения точки![]() – прямая,
совпадающая с осью
– прямая,
совпадающая с осью![]() .
.
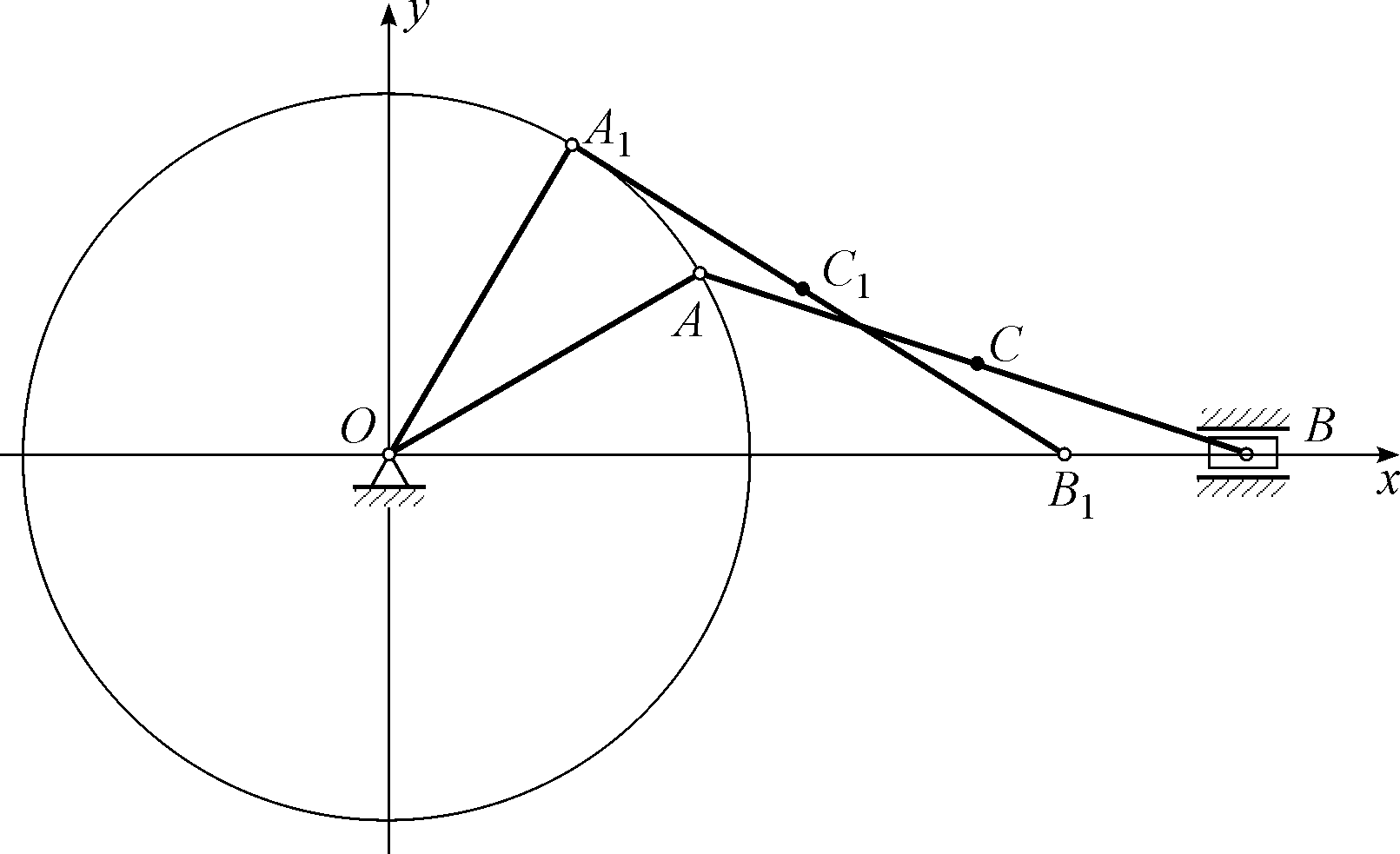
Рис. 2.Построение
траектории точек![]() ,
,![]() ,
,![]() за один полный поворот кривошипа
за один полный поворот кривошипа
Поскольку точка
![]() находится по середине длины шатуна
находится по середине длины шатуна
![]() ,
то ее местоположение для каждого угла
поворота кривошипа также определяется
при графическом построении положения
шатуна. Получившиеся соответственно
12 или 8 точек соединяют плавной кривой
и устанавливают траекторию движения
точки
,
то ее местоположение для каждого угла
поворота кривошипа также определяется
при графическом построении положения
шатуна. Получившиеся соответственно
12 или 8 точек соединяют плавной кривой
и устанавливают траекторию движения
точки![]() за один полный оборот кривошипа.
Получающаяся замкнутая кривая должна
иметь вид эллипса. Уравнение эллипса:
за один полный оборот кривошипа.
Получающаяся замкнутая кривая должна
иметь вид эллипса. Уравнение эллипса:
![]() , (1)
, (1)
где ![]() ,
,![]() – полуоси
эллипса (рис. 3).
– полуоси
эллипса (рис. 3).
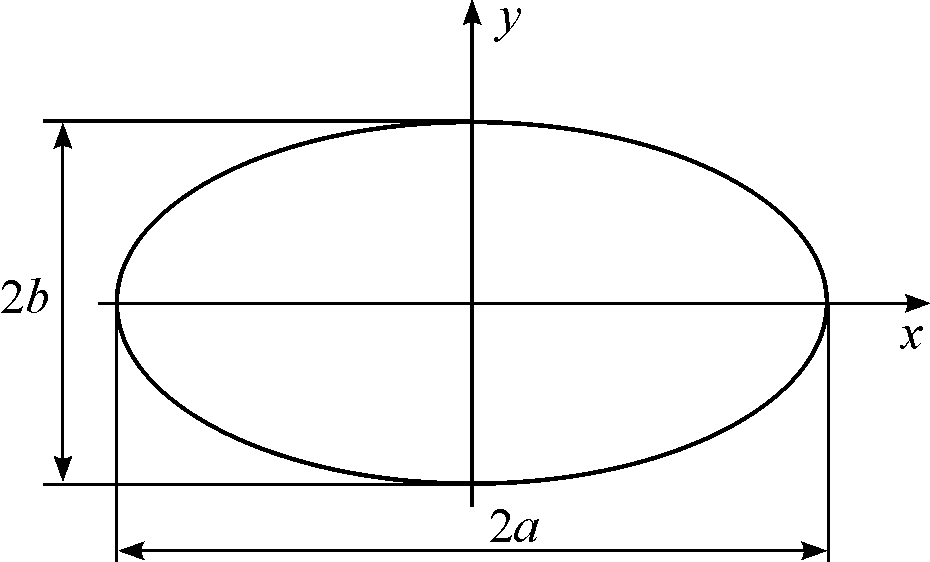
Рис. 3.К
определению траектории движения точки![]()
Измеряя получившиеся
полуоси эллипса в масштабе, принятом
для построения траектории, определяют
величины
![]() ,
,![]() и записывают уравнение движения точки
и записывают уравнение движения точки![]() .
.
Построив траектории
движения точек
![]() ,
,![]() ,
,![]() за один полный оборот кривошипа следует
заполнить соответствующие столбцы
табл. 2:
за один полный оборот кривошипа следует
заполнить соответствующие столбцы
табл. 2:![]() ,
,![]() .
.
Таблица 2.
|
Точка |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|