

2.3. Примеры решения задач т1
Пример 1
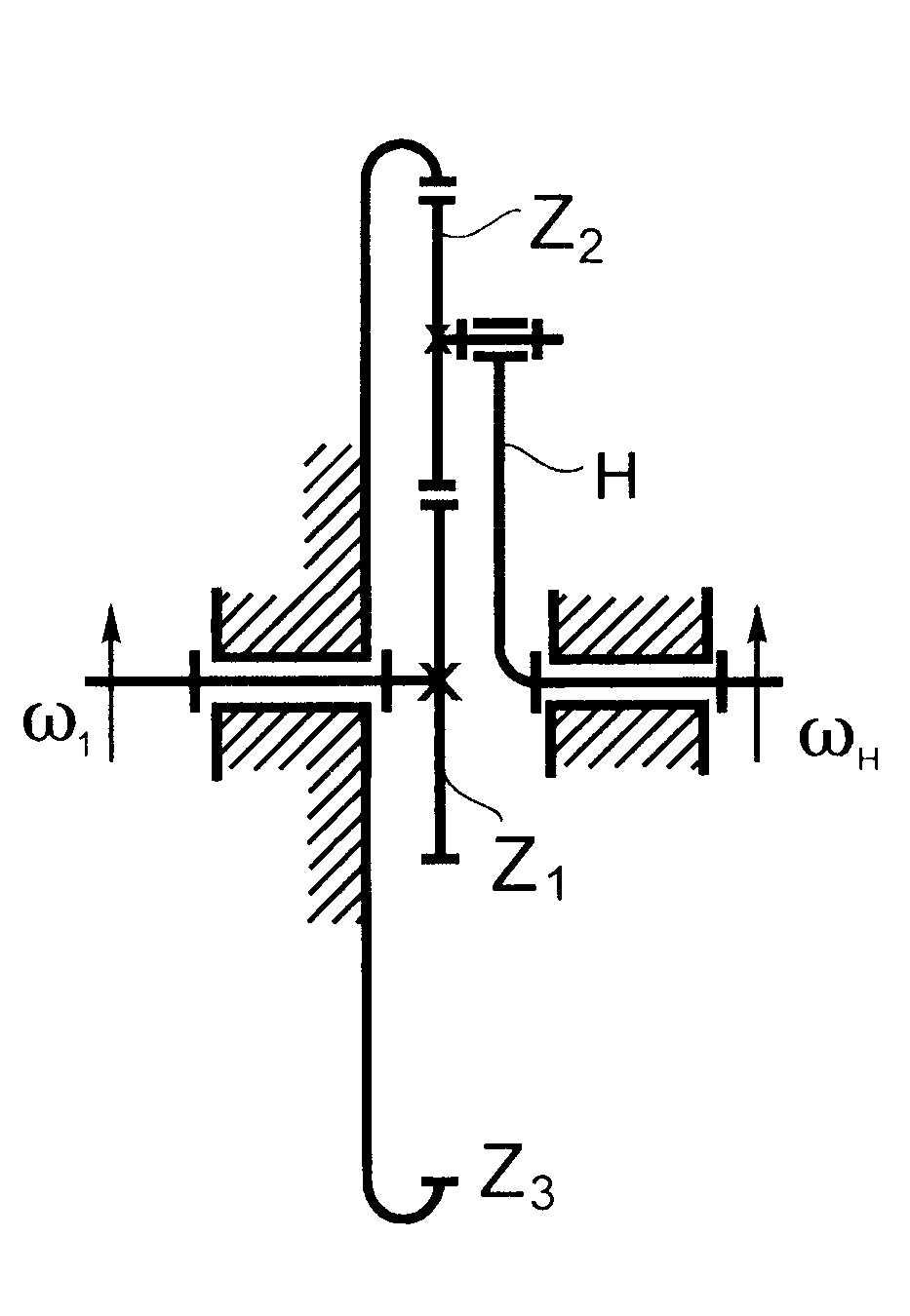
Определить передаточное отношение зубчатой передачи (рис. 19), число оборотов ведомого вала и общий коэффициент полезного действия (кпд), если количества зубьев колес равны: z1=30, z2=20, z3=45, z4=30, z5=20, z6=120, z7=25, z8=15; число оборотов ведущего вала n1=1600 об/мин.

Рис. 19
Решение
Механизм состоит из четырех ступеней: двух цилиндрических z1-z2, z3-z4 с внешним зацеплением, цилиндрической z5-z6 с внутренним зацеплением и конической z7-z8.
Общее передаточное отношение многоступенчатой передачи равно произведению передаточных отношений каждой ступени, образующих этот зубчатый механизм. Для данного случая
![]()
![]() .
.
Знак (–) показывает, что направление вращения колес в этих парах противоположное. Направление вращения колес в данном случае так же можно определить путем простановки стрелок на схеме (рис. 19).
Число оборотов
ведомого вала определяем через
передаточное отношение
![]() об/мин.
об/мин.
Общий кпд зубчатого механизма равен
![]() ,
,
где числовые значения приняты согласно условию задачи Т1.
Пример 2
|
Рис. 20 |
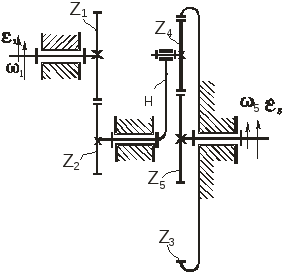
Для редуктора
Джемса подсчитать передаточное
отношение
Решение Рассматриваемый редуктор относится к одноступенчатой планетарной передаче и передаточное отношение от колеса z1 к водилу Н определяется как
|
Здесь
![]() ,
,![]() ,
,![]() – передаточные отношения преобразованного
механизма (водилоН
остановлено, а вращается неподвижное
колесо z3).
Полученное передаточное отношение со
знаком «+» свидетельствует о совпадении
направлений вращения ведущего и ведомого
валов.
– передаточные отношения преобразованного
механизма (водилоН
остановлено, а вращается неподвижное
колесо z3).
Полученное передаточное отношение со
знаком «+» свидетельствует о совпадении
направлений вращения ведущего и ведомого
валов.
Пример 3
|
Рис. 21 |
Для редуктора
Давида определить передаточное
отношение
|

Решение
Как и в примере 2 этот механизм относится к одноступенчатой планетарной передаче и передаточное отношение от водила Н к колесу z1 определяется отношением
 .
.
Пример 4
|
Рис. 22 |
Для зубчатой передачи, показанной на рис. 22, выполнить расчеты согласно требований задачи Т1, если: z1=20, z2=15, z3=100, z4=40, z5=50,
|
Решение
Сложная зубчатая передача состоит из двух ступеней: первая ступень – простая цилиндрическая пара с внешним зацеплением z1-z2, вторая ступень – планетарный механизм Н-z5, передающий вращательное движение от водила Н к колесу z5 через сателлит z4. Направление вращения выходного вала определяется алгебраическим знаком.
1. Для двухступенчатой передачи общее передаточное отношение находим через передаточные отношения каждой ступени, т.е.
![]()
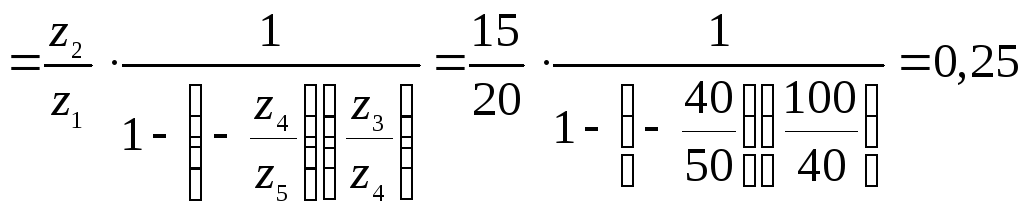 .
.
Полученное
передаточное отношение
![]() ,
что свидетельствует о повышении частоты
вращения выходного вала, а знак «+»
показывает, что направления вращения
валов совпадают.
,
что свидетельствует о повышении частоты
вращения выходного вала, а знак «+»
показывает, что направления вращения
валов совпадают.
2. Определяем
угловую скорость выходного звена
![]() и его угловое ускорение
и его угловое ускорение![]()
![]() рад/с,
рад/с,
![]() рад/с2.
рад/с2.
3. Поскольку вращение колес ускоренное (принимаем равноускоренное), то время, в течение которого угловые скорости увеличатся в два раза, определим из зависимости
![]() ,
,
где
![]() и
и![]() - угловые скорости соответственно в
начале и в конце рассматриваемого
периода времени
- угловые скорости соответственно в
начале и в конце рассматриваемого
периода времени![]() .
Отсюда
.
Отсюда
![]() с.
с.
4. Определяем общий коэффициент полезного действия передачи
![]() .
.
Задача Т2
Выходное
звено механизма, показанного на схемах
(рис. 23–32), совершает возвратно-поступательное
(или возвратно-вращательное) движение
и нагружено на рабочем ходу постоянной
силой Fc
(или
моментом Тс)
полезного сопротивления. На холостом
ходу, при обратном направлении движения
выходного звена, полезное сопротивление
отсутствует, но продолжают действовать
вредные. Учитывая действие трения в
кинематических парах, по коэффициенту
полезного действия
![]() механизма необходимо определить:
механизма необходимо определить:
1) движущий момент Тд, постоянный по величине, который нужно приложить к входному звену при установившемся движении с циклом, состоящим из рабочего и холостого ходов;
2) работы сил трения на рабочем и холостом ходах, считая, что вредное сопротивление постоянно на каждом из ходов, но на рабочем ходу оно в три раза больше, чем на холостом;
3) изменение кинетической энергии механизма за время рабочего хода и за время холостого хода;
4)
мощность, требуемую от привода при
вращении входного звена со
средней скоростью
![]() и средние (за целый оборот) мощности
полезного сопротивления и сил трения.
и средние (за целый оборот) мощности
полезного сопротивления и сил трения.
Решение
этой задачи основано на уравнении
движения механизма, устанавливающем
связь между изменением кинетической
энергии и работами сил (законе кинетической
энергии). Работа сил и моментов
определяется соответственно по линейным
или угловым перемещениям звеньев,
на которые они действуют. В связи с этим
требуется определить положения механизма
при крайних положениях выходного звена.
Перемещения звеньев, линейные и угловые,
можно определить по чертежу,
выполненному в масштабе, или рассчитать
аналитически. Размеры звеньев,
согласно их обозначениям на схеме
механизма, и другие необходимые величины
приведены в таблицах числовых данных,
где
![]() – коэффициент полезного действия, а в
варианте 9m
– модуль реечного зацепления, z
–
число зубьев колеса.
– коэффициент полезного действия, а в
варианте 9m
– модуль реечного зацепления, z
–
число зубьев колеса.
|
Вариант 1. Шарнирный четырехзвенник (рис. 23, табл. 17)
Рис. 23 |
Вариант 2. Кривошипно-шарнирный механизм (рис. 24, табл. 18)
Рис. 24 |
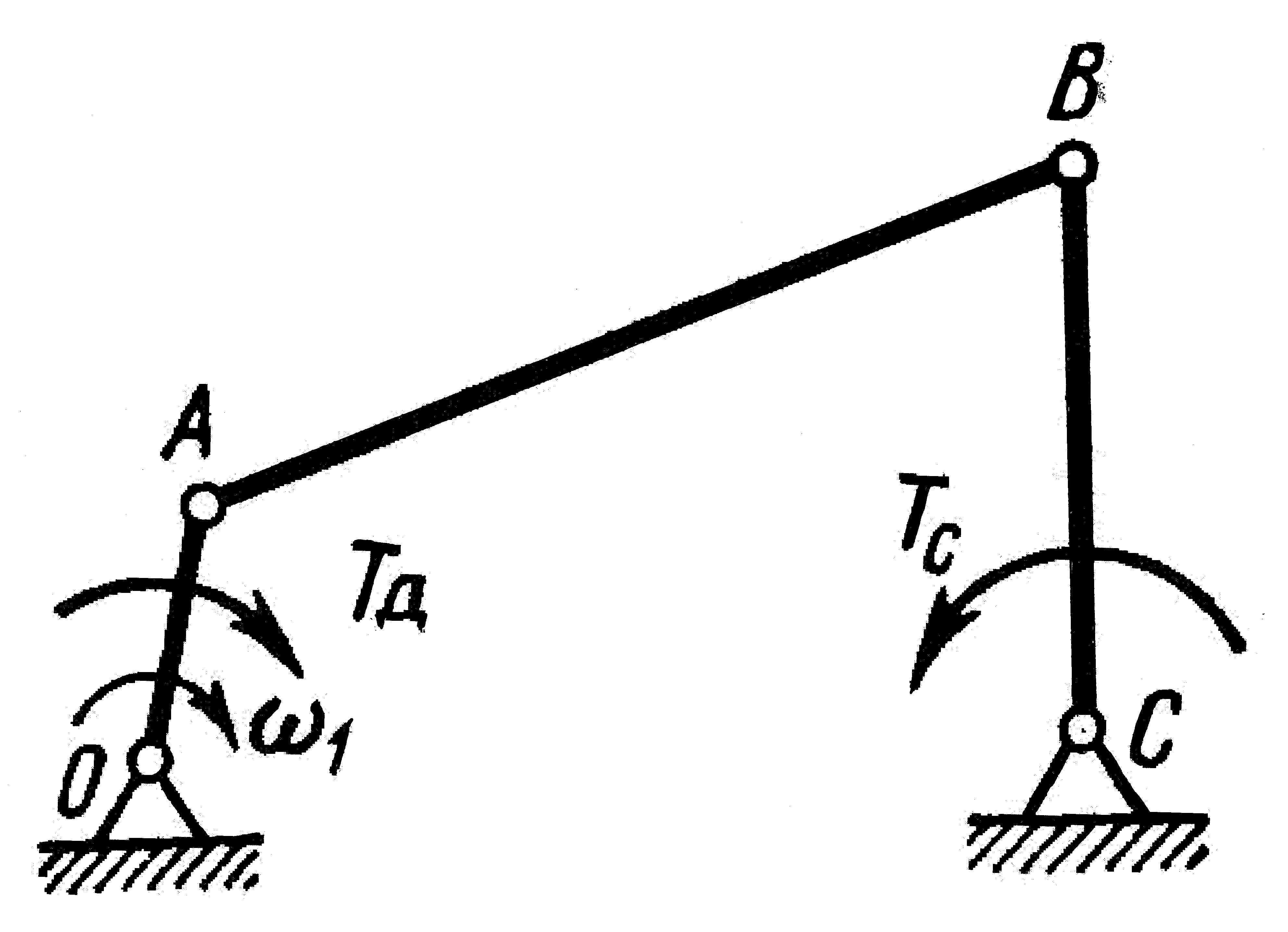
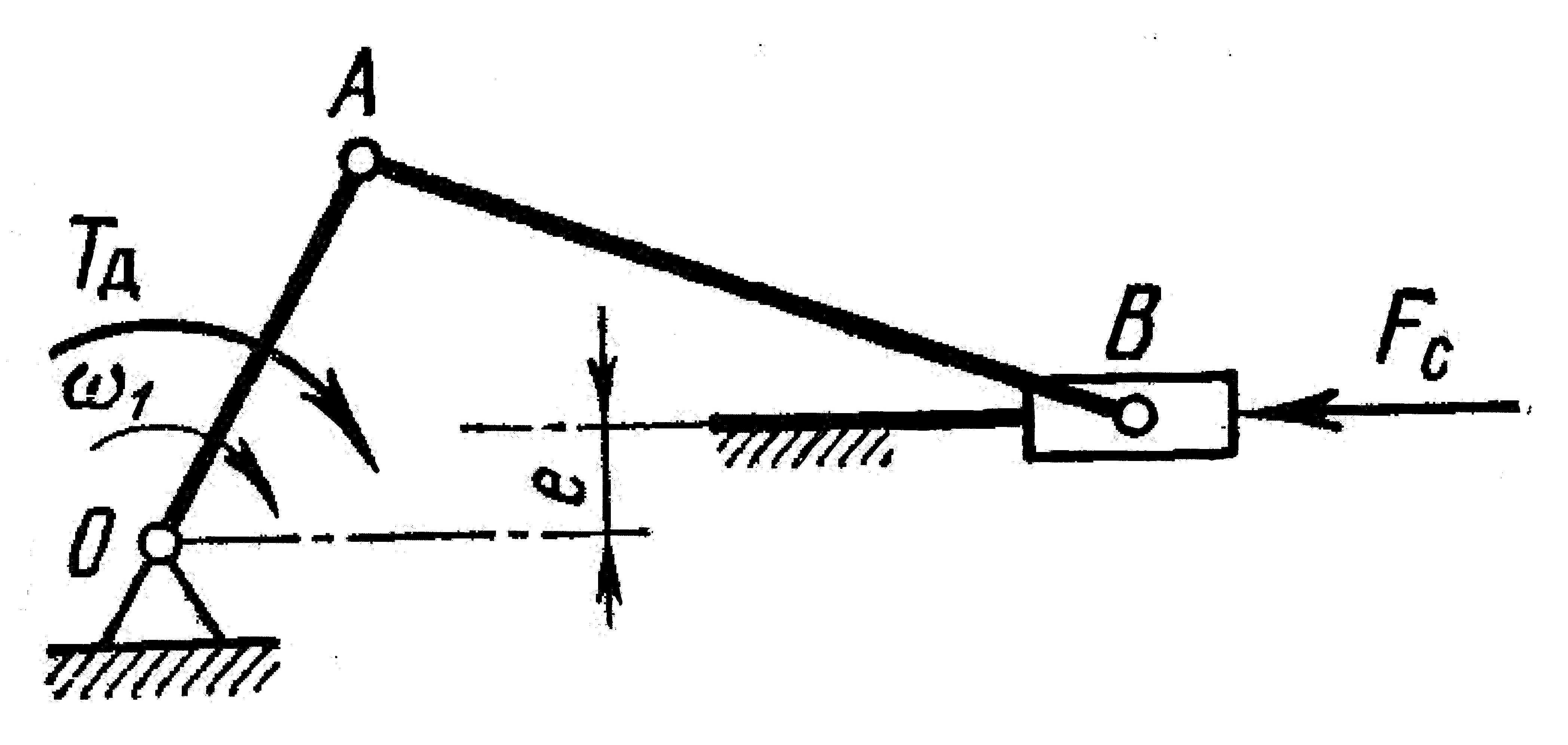
Таблица 17
|
Величина |
Предпоследняя цифра шифра | |||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | |
|
ОА, мм |
70 |
100 |
60 |
120 |
50 |
100 |
40 |
80 |
30 |
60 |
|
ОС, мм |
160 |
250 |
120 |
240 |
120 |
200 |
100 |
160 |
70 |
120 |
|
ВС, мм |
150 |
250 |
160 |
200 |
100 |
250 |
250 |
200 |
80 |
150 |
|
АВ, мм |
130 |
250 |
180 |
300 |
150 |
250 |
250 |
200 |
80 |
150 |
|
Т с, Нм |
240 |
600 |
250 |
300 |
200 |
120 |
20 |
150 |
25 |
90 |
|
|
0,90 |
0,92 |
0,93 |
0,89 |
0,94 |
0,91 |
0,92 |
0,9 |
0,93 |
0,84 |
|
|
120 |
10 |
60 |
80 |
250 |
80 |
150 |
50 |
160 |
100 |
Таблица 18
|
Величина |
Предпоследняя цифра шифра | |||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | |
|
ОА, мм |
120 |
120 |
25 |
100 |
100 |
80 |
20 |
50 |
40 |
50 |
|
е, мм |
60 |
50 |
10 |
4 |
30 |
20 |
10 |
25 |
8 |
10 |
|
АВ, мм |
400 |
300 |
100 |
30 |
300 |
300 |
90 |
200 |
100 |
100 |
|
Fc, Н |
8000 |
9000 |
1000 |
90 |
7000 |
8000 |
1000 |
2000 |
800 |
500 |
|
|
0,76 |
0,7 |
0,8 |
0,9 |
0,86 |
0,9 |
0,75 |
0,7 |
0,8 |
0,85 |
|
|
60 |
100 |
240 |
400 |
30 |
150 |
300 |
250 |
200 |
100 |
|
Вариант 3. Кулисный механизм (рис.25, табл. 19)
Рис. 25 |
Вариант 4. Механизм строгального станка (рис. 26, табл. 20)
Рис. 26 |
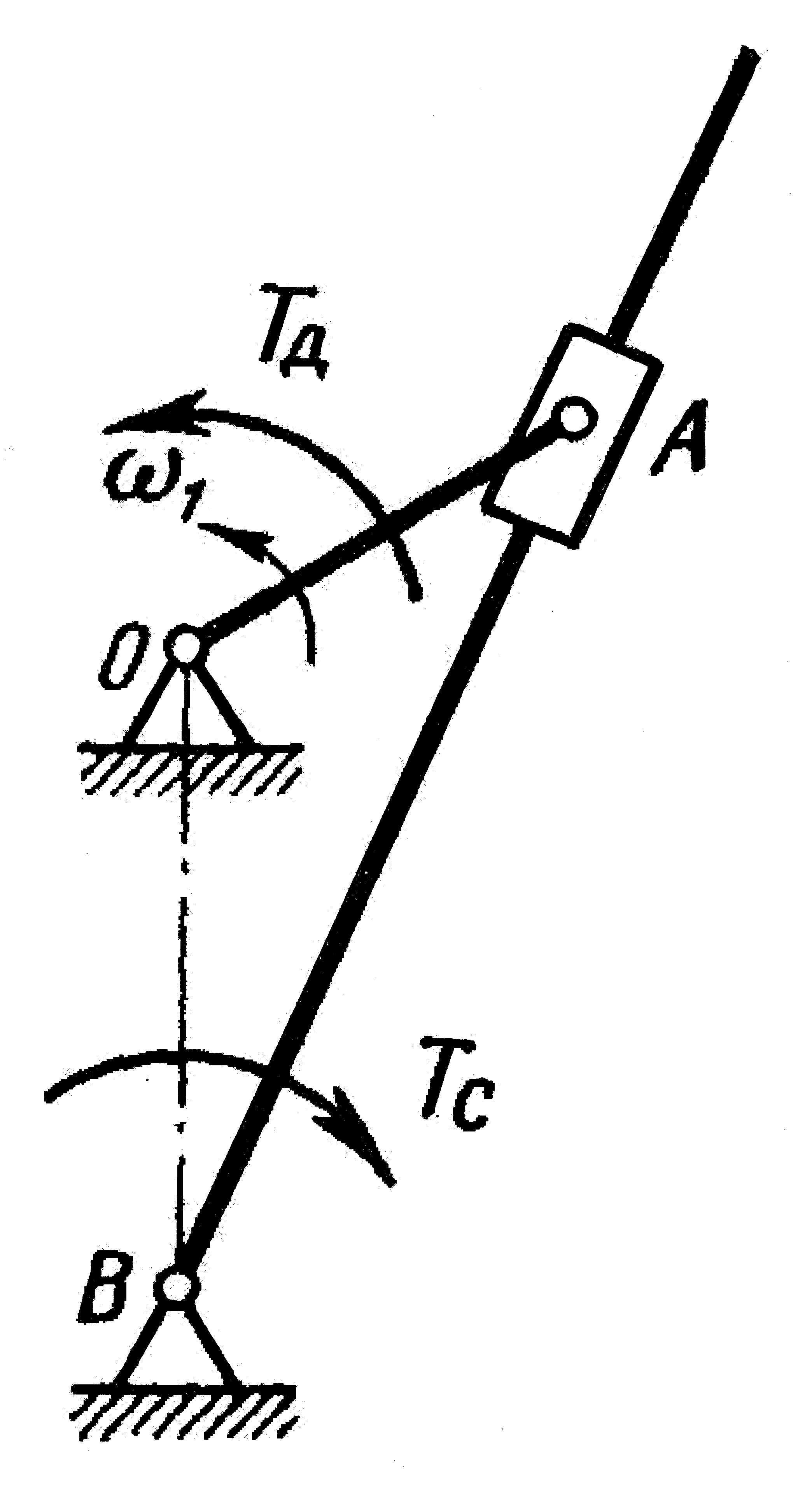

Таблица 19
|
Величина
|
Предпоследняя цифра шифра | |||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | |
|
ОА, мм |
60 |
30 |
60 |
180 |
120 |
25 |
200 |
150 |
100 |
50 |
|
ОВ, мм |
120 |
80 |
150 |
700 |
500 |
100 |
500 |
400 |
200 |
100 |
|
Тс, Нм |
150 |
1 |
700 |
900 |
300 |
4 |
800 |
450 |
500 |
50 |
|
|
0,72 |
0,69 |
0,74 |
0,73 |
0,75 |
0,71 |
0,68 |
0,7 |
0,7 |
0,75 |
|
|
60 |
160 |
40 |
12 |
25 |
12 |
10 |
15 |
8 |
10 |
Таблица 20
|
|
Величина |
Предпоследняя цифра шифра | ||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | ||||||||||||
|
|
ОА, мм |
50 |
100 |
160 |
200 |
25 |
120 |
150 |
60 |
30 |
50 | |||||||||||
|
|
ОВ, мм |
120 |
250 |
400 |
500 |
100 |
500 |
450 |
180 |
100 |
100 | |||||||||||
|
|
ВС=ВD, мм |
150 |
400 |
600 |
900 |
180 |
650 |
600 |
300 |
150 |
180 | |||||||||||
|
|
Fc, Н |
600 |
3000 |
5000 |
8000 |
250 |
2000 |
9000 |
500 |
100 |
150 | |||||||||||
|
|
|
0,6 |
0,62 |
0,64 |
0,65 |
0,6 |
0,61 |
0,63 |
0,64 |
0,6 |
0,65 | |||||||||||
|
|
|
40 |
30 |
20 |
10 |
40 |
25 |
15 |
30 |
80 |
ЕО | |||||||||||
|
|
|
| ||||||||||||||||||||
|
Вариант 5. Механизм эксцентрика с рамкой (рис. 27, табл. 21)
Рис. 27 |
Вариант 6. Кулисный механизм строгального станка (рис. 28, табл. 22)
Рис. 28 |
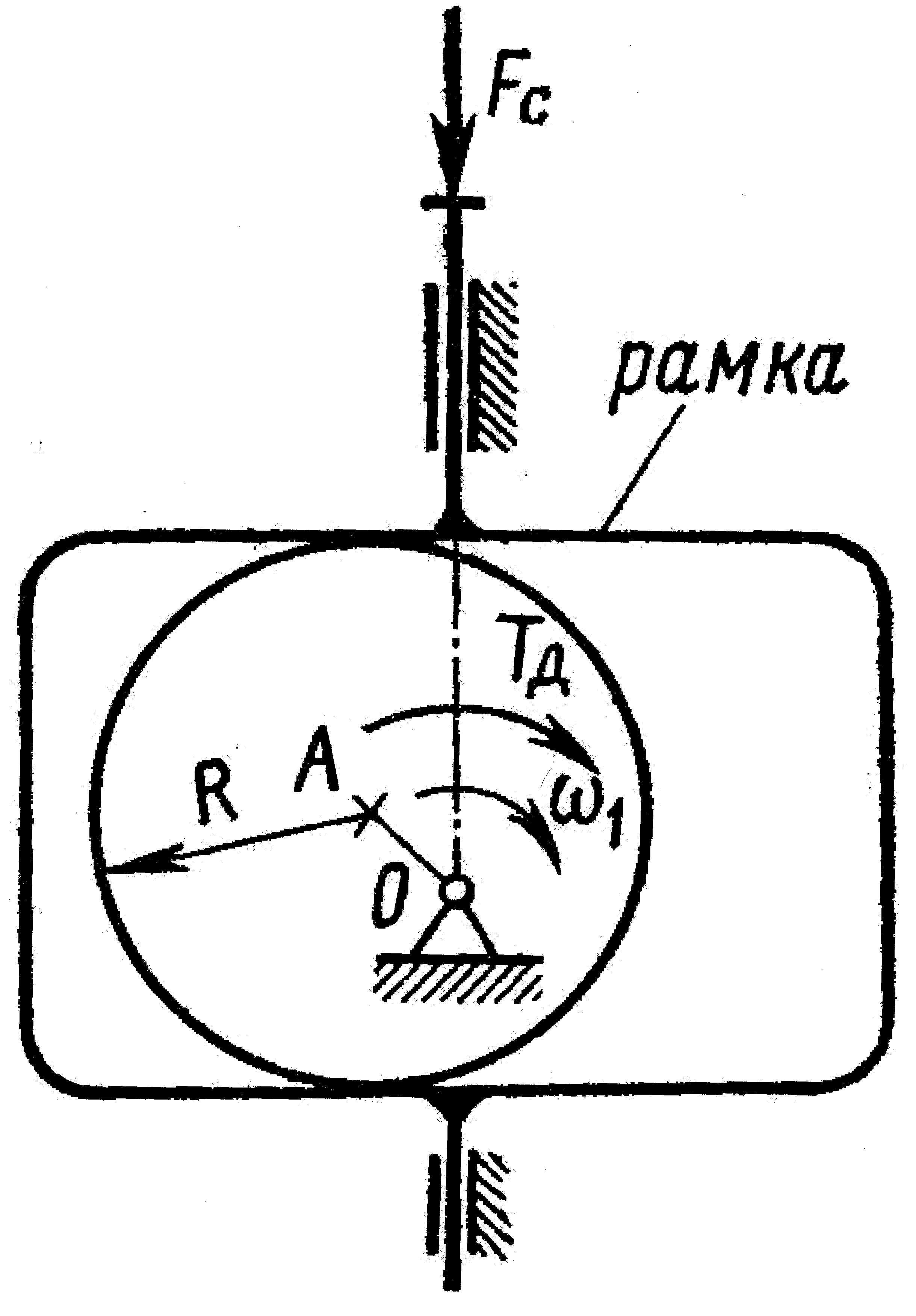

Таблица 21
|
Величина |
Предпоследняя цифра шифра | |||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | |
|
R, мм |
40 |
15 |
20 |
30 |
25 |
45 |
50 |
20 |
60 |
40 |
|
ОА, мм |
25 |
10 |
12 |
15 |
15 |
20 |
20 |
10 |
25 |
15 |
|
Fc, Н |
65 |
30 |
45 |
65 |
60 |
90 |
120 |
50 |
100 |
40 |
|
|
0,72 |
0,7 |
0,71 |
0,69 |
0,7 |
0,72 |
0,68 |
0,71 |
0,72 |
0,7 |
|
|
75 |
150 |
120 |
100 |
90 |
90 |
70 |
100 |
60 |
80 |
Таблица 22
|
Величина |
Предпоследняя цифра шифра | |||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | |
|
ОА, мм |
30 |
30 |
65 |
180 |
120 |
25 |
200 |
160 |
100 |
50 |
|
ОВ, мм |
100 |
80 |
200 |
650 |
480 |
100 |
620 |
400 |
220 |
90 |
|
BD, мм |
250 |
150 |
300 |
900 |
650 |
200 |
900 |
650 |
360 |
150 |
|
Fc, Н |
100 |
50 |
500 |
9000 |
2000 |
20 |
800 |
500 |
3000 |
600 |
|
|
0,64 |
0,62 |
0,65 |
0,63 |
0,61 |
0,6 |
0,65 |
0,64 |
0,62 |
0,6 |
|
|
50 |
150 |
30 |
12 |
25 |
40 |
10 |
16 |
10 |
20 |
|
Вариант 7. Синусный механизм (рис. 29, табл. 23)
Рис. 29
|
Вариант 8. Механизм пазоваго эксцентрика (рис. 30, табл. 24)
Рис. 30 |
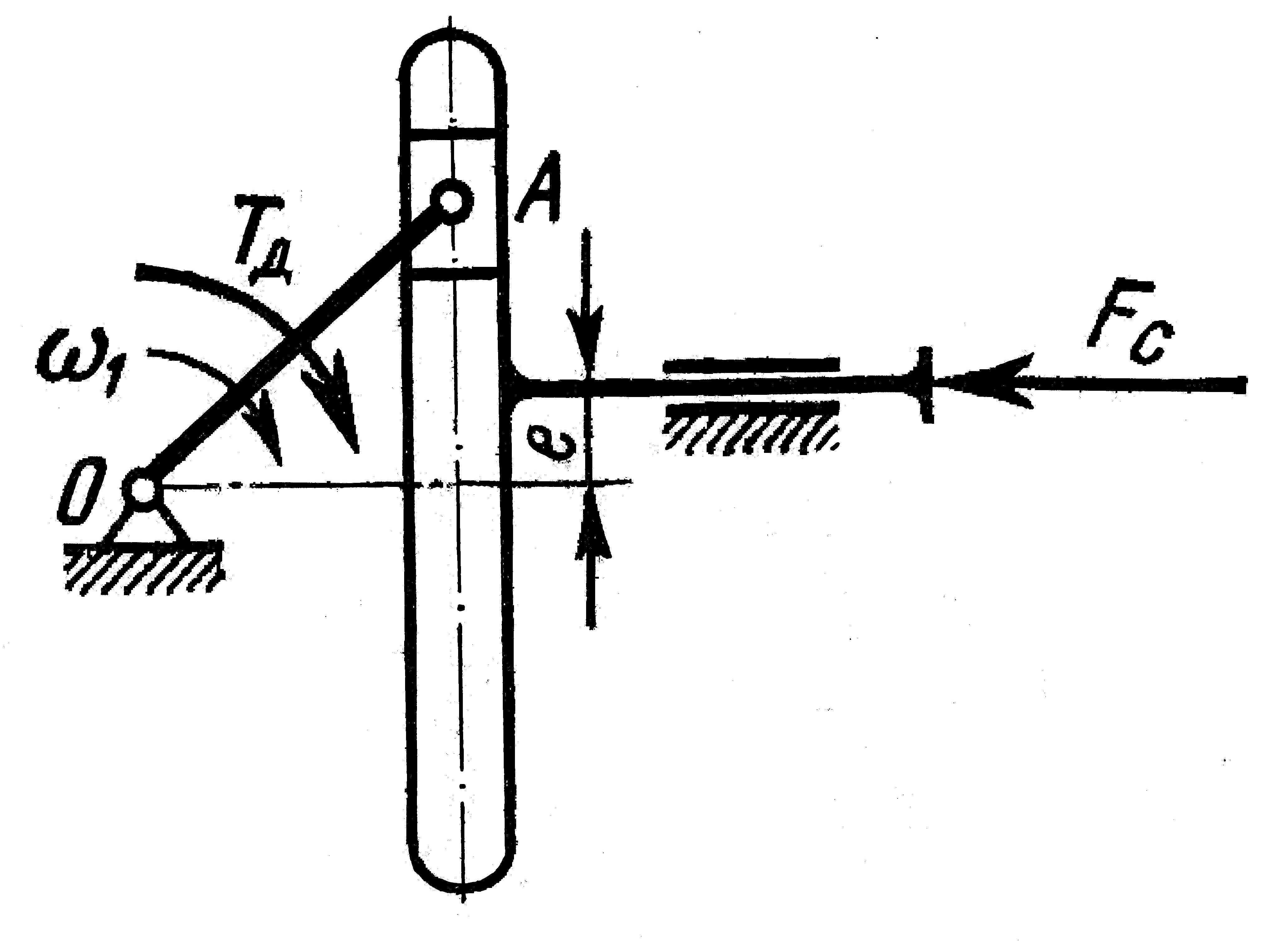

Таблица 23
|
Величина |
Предпоследняя цифра шифра | |||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | |
|
ОА, мм |
60 |
25 |
100 |
10 |
40 |
20 |
80 |
60 |
50 |
30 |
|
е, мм |
30 |
15 |
40 |
5 |
0 |
10 |
30 |
30 |
10 |
12 |
|
Fc, Н |
400 |
120 |
200 |
10 |
400 |
50 |
2000 |
800 |
200 |
100 |
|
|
0,65 |
0,80 |
0,68 |
0,75 |
0,72 |
0,75 |
0,71 |
0,65 |
0,80 |
0,7 |
|
|
100 |
150 |
60 |
180 |
80 |
150 |
80 |
140 |
120 |
100 |
Таблица 24
|
Величина |
Предпоследняя цифра шифра | |||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | |
|
R, мм |
40 |
60 |
25 |
50 |
42 |
25 |
30 |
20 |
15 |
35 |
|
ОА, мм |
15 |
20 |
10 |
20 |
15 |
10 |
18 |
14 |
7 |
22 |
|
r, мм |
10 |
15 |
6 |
12 |
10 |
7 |
8 |
4 |
5 |
8 |
|
|
0,81 |
0,8 |
0,82 |
0,84 |
0,8 |
0,85 |
0,83 |
0,8 |
0,81 |
0,8 |
|
Fc, Н |
55 |
120 |
50 |
100 |
90 |
60 |
65 |
45 |
30 |
70 |
|
|
80 |
60 |
100 |
80 |
90 |
110 |
180 |
120 |
140 |
70 |
|
Вариант 9. Синусный механизм (рис. 31, табл. 25)
Рис. 31
|
Вариант 10. Механизм пазоваго эксцентрика (рис. 32, табл. 26)
Рис. 32 |
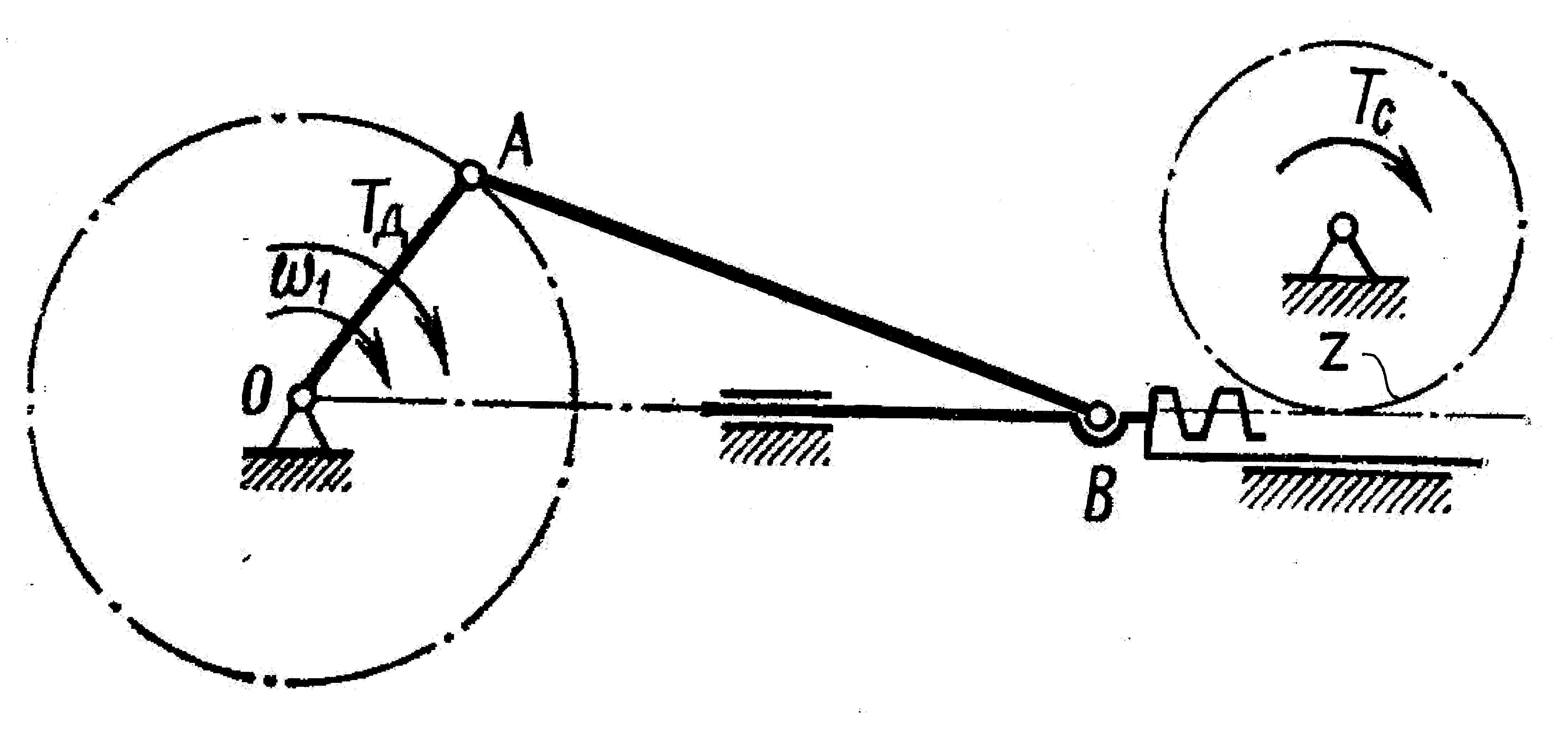
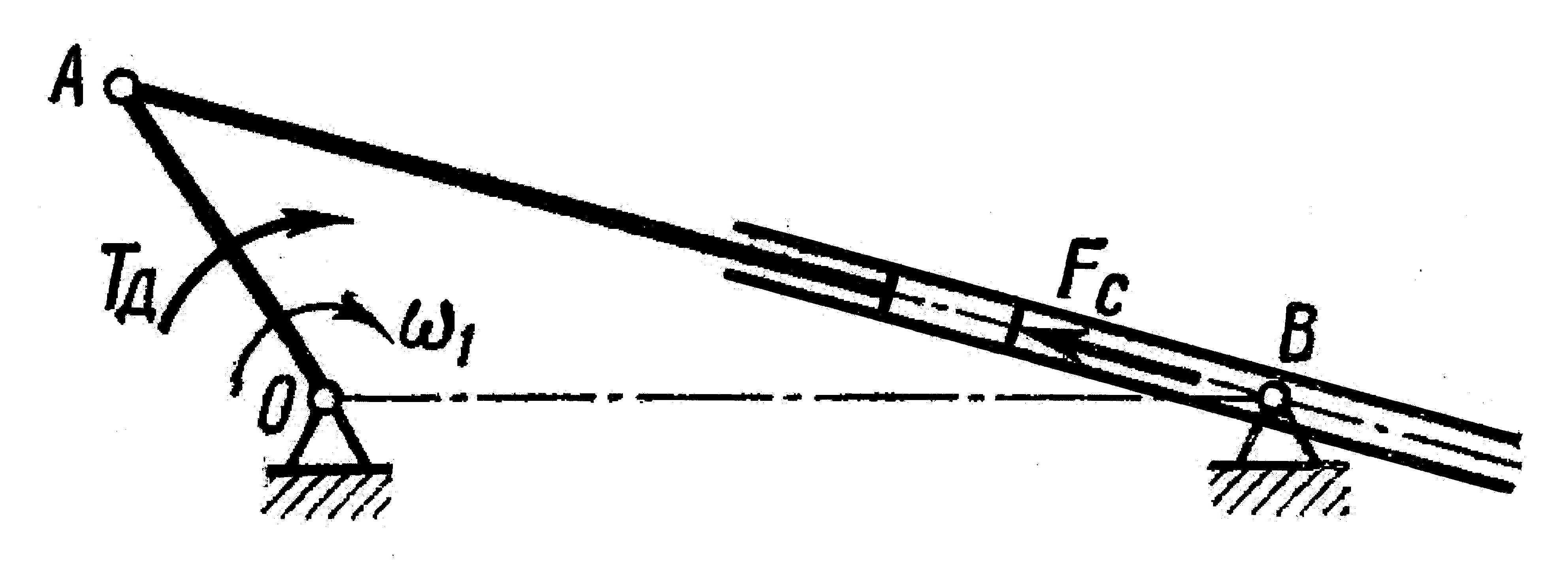
Таблица 25
|
Величина |
Предпоследняя цифра шифра | |||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | |
|
ОА, мм |
38 |
150 |
35 |
22 |
15 |
40 |
25 |
30 |
20 |
10 |
|
АВ, мм |
100 |
450 |
80 |
55 |
40 |
100 |
75 |
80 |
50 |
30 |
|
m, мм |
3 |
5 |
1,5 |
2 |
1,5 |
3 |
2,5 |
2 |
2 |
1,5 |
|
z |
25 |
20 |
30 |
35 |
40 |
30 |
20 |
50 |
30 |
40 |
|
|
0,72 |
0,7 |
0,69 |
0,76 |
0,73 |
0,76 |
0,74 |
0,71 |
0,72 |
0,7 |
|
Тс, Нм |
200 |
2500 |
15 |
400 |
20 |
120 |
45 |
60 |
30 |
20 |
|
|
50 |
75 |
50 |
60 |
85 |
70 |
120 |
90 |
80 |
100 |
Таблица 26
|
Величина |
Предпоследняя цифра шифра | |||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | |
|
ОА, мм |
150 |
130 |
25 |
10 |
150 |
20 |
100 |
80 |
40 |
50 |
|
ОВ, мм |
280 |
300 |
70 |
30 |
350 |
80 |
350 |
300 |
100 |
150 |
|
Fc, Н |
4000 |
9000 |
1500 |
1000 |
5000 |
1800 |
8000 |
4000 |
1500 |
1200 |
|
|
0,75 |
0,77 |
0,79 |
о.а |
0,74 |
0,8 |
0,75 |
о,7а |
0,76 |
0,75 |
|
|
25 |
50 |
120 |
100 |
20 |
90 |
30 |
40 |
80 |
60 |
Последовательность
выполнения задания. Во-первых необходимо
построить механизм в крайних положениях,
и по заданным направлениям угловой
скорости входного звена
![]() и постоянной силыFс
(или
момента Тс)
полезного сопротивления установить
рабочие и холостые ходы.
и постоянной силыFс
(или
момента Тс)
полезного сопротивления установить
рабочие и холостые ходы.
При графическом определении линейных и угловых перемещений звеньев необходимо снять с чертежа:
1) для
входного звена его углы поворота на
рабочем ходу
![]() и на холостом
и на холостом![]() х;
х;
2) для
выходного звена при его возвратно-поступательном
движении линейное перемещение, т.е.
ход s,
или при его возвратно-вращательном
движении угол размаха
![]() .
.
Для того чтобы определить зоны рабочего и холостого ходов для входного звена, нужно учитывать связь движения с показанным направлением действия полезного сопротивления, которое на рабочем ходу должно препятствовать движению выходного звена.
В вариантах 5 и 8 применено геометрическое замыкание звеньев в высшей паре, предупреждающее отход звеньев друг от друга: в варианте 8 ролик радиуса r перекатывается в круговом пазу входного звена, охваченный наружным и внутренним профилями паза, в варианте 5 круглый эксцентрик охвачен рамкой выходного звена.