

12-22
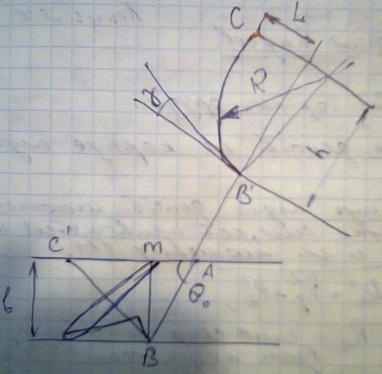
.doc12. Какими параметрами характеризуется направляющая кривая, как определяются эти параметры?
Для нормальной работы ЛОП, отрезок BC’ должен равняться дуге B’C. Определим BC’ из треугольника BmC’:
![]()
![]()
![]()
![]()
Определим вылет и высоту направляющей кривой:
![]()
![]()
13. Как определить составляющие сил, действующих на корпус плуга вдоль координатных осей Rx, Ry, Rz и как устанавливаются соотношения между ними?
На основе опытных данных установлено, что точка приложения равнодействующей R имеет координаты:
xo=0,4·bcos ; yo=0,4·b; zo=(0,3..0,5)·а.
Горизонтальная составляющая сил Rx, действующая вдоль оси Х, определяется по эмпирической зависимости Rx=k·а·b, где k - удельное сопротивление почвы, кН/м2; а - глубина пахоты, м; b - ширина захвата корпуса, м. Значение сил Ry и Rz зависит от состояния лемехов, глубины обработки, скорости движения, свойств почвы, типа и параметров рабочих органов и определяются по выражениям:
![]() ,
,
![]() ,
,
где c и d – экспериментальные коэффициенты пропорциональности,
с =1/3, d = 0,2
14. Какие способы определения тягового сопротивления Вы знаете? Как определяется КПД плуга?
*аналитический
*экспериментальный
*графоаналитический
Формула горячкина:
![]()
![]()
P1 – расходуется на протаскивание плуга и учитывает сухое трение в подшипниках, трение о стенку и дно борозды и усилие на перекатывание опорных колес.
f – коэф пропорциональности, 0,2 – 0,5.
G – сила тяжести орудий.
![]() – коэф пропорциональности. Учитывающий
свойство почвы и форму ЛОП.
– коэф пропорциональности. Учитывающий
свойство почвы и форму ЛОП.
Р2 – полезная работа (подрезание и крошение пласта почвы).
Р3- затрачивается на отбрасывание и оборот пласта почвы, придание ему кинетической энергии.
Упрощенная формула для определения
тягового сопротивления ![]()
![]() - удельное сопротивление орудия.
- удельное сопротивление орудия.
Экспериментальным путем тяговое сопротивление определяется при помощи тензометрии. Полученные диаграммы при записи тензометрических датчиков обрабатывают и получают среднее значение тягового сопротивления.
![]() где Рi – i
– тая ордината сигнала тягового
сопротивления; n –
количество измерений.
где Рi – i
– тая ордината сигнала тягового
сопротивления; n –
количество измерений.
Разброс величины тягового сопротивления,
если данный процесс подчиняется закону
нормального распределения ![]() .
.
Для полной характеристики протекаемого процесса определяют корреляционные функции и спектральные плоскости.
![]()
15. приближенная формула определения тягового сопротивления плуга.
Упрощенная формула для определения
тягового сопротивления ![]()
![]() - удельное сопротивление орудия.
- удельное сопротивление орудия.
16. Как определяется тяговое сопротивление плуга по рациональной формуле академика В.П. Горячкина? Привести вывод и анализ формулы.
Формула горячкина:
![]()
![]()
P1 – расходуется на протаскивание плуга и учитывает сухое трение в подшипниках, трение о стенку и дно борозды и усилие на перекатывание опорных колес.
f – коэф пропорциональности, 0,2 – 0,5.
G – сила тяжести орудий.
![]() – коэф пропорциональности. Учитывает
свойство почвы и форму ЛОП.
– коэф пропорциональности. Учитывает
свойство почвы и форму ЛОП.
Р2 – полезная работа (подрезание и крошение пласта почвы).
Р3- затрачивается на отбрасывание и оборот пласта почвы, придание ему кинетической энергии.
![]()
V’ – скорость отбрасывания пласта почвы в сторону; m – секундная масса почвы, проходящая по отвалу.
![]()
![]()
![]() – объемный вес почвы.
– объемный вес почвы.
![]()
17. Как определить тяговое сопротивление плуга экспериментальным путем и как определяются статистические характеристики тягового сопротивления?
Экспериментальным путем тяговое сопротивление определяется при помощи тензометрии. Полученные диаграммы при записи тензометрических датчиков обрабатывают и получают среднее значение тягового сопротивления.
![]() где Рi – i
– тая ордината сигнала тягового
сопротивления; n –
количество измерений.
где Рi – i
– тая ордината сигнала тягового
сопротивления; n –
количество измерений.
Дисперсия Д определяется по выражению:
![]()
Среднеквадратичное отклонение: ![]() .
.
Коэф вариации: ![]()
Разброс величины тягового сопротивления,
если данный процесс подчиняется закону
нормального распределения ![]() .
.
Для полной характеристики протекаемого процесса определяют корреляционные функции и спектральные плоскости.
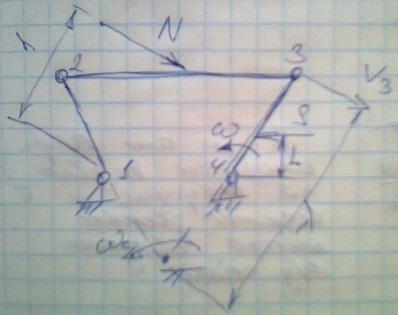
18. Как определить движущую силу в четырехзвенном механизме, если ведущим звеном является кривошип, а ведомым шатун
Это механизм 3 группы. Звено 3-4 – кривошип, 2-3 – шатун.
![]()
![]()
![]() – расстояние от точки соединения
ведущего и ведомого звеньев до мгновенного
центра вращения. l – длина
ведущего звена.
– расстояние от точки соединения
ведущего и ведомого звеньев до мгновенного
центра вращения. l – длина
ведущего звена.
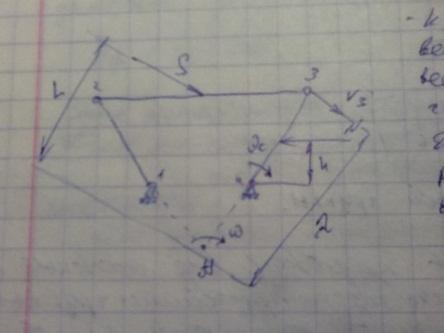
19. Как определить движущую силу в четырехзвенном механизме, если ведущим звеном является шатун, а ведомым – кривошип
Механизм 2 группы. 2-3 – шатун – ведущее; 3-4 – кривошип – ведомое.
![]()
![]()
20. Как определить движущую силу в четырехзвенном механизме, у которого ведущие и ведомые звенья - кривошипы
1-2 – ведущее звено – кривошип, приложена активная сила; 3-4 – ведомое – кривошип, приложена сила сопротивления. Механизм первой группы.

![]()
![]()
![]()
![]()
![]()
![]()
![]()
21. Как определить движущие силы в механизме, у которого ведущие и ведомые звенья жестко связаны между собой?
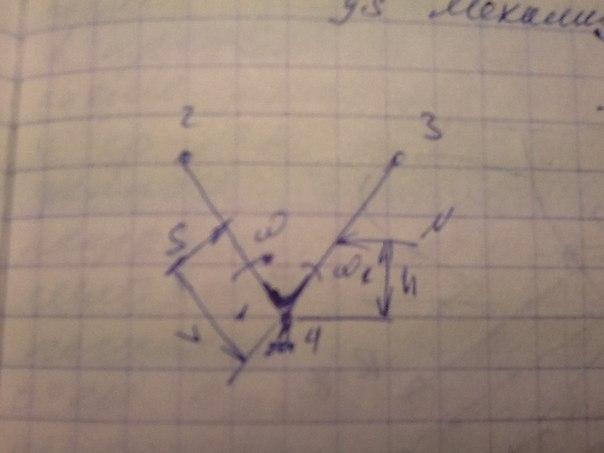
Механизм 4 группы. Ведущее и ведомое звено жестко связаны между собой. 1-2 – ведущее; 3-4 – ведомое. Угловая скорость ведущего звена равняется угловой скорости ведомого.
![]()
![]()
![]()
22. Как определить движущие силы в механизме, у которого ведущие и ведомые звенья соединены между собой несколькими четырехзвенными механизмами?
Связанные последовательной кинетической цепью. В данном случае общее передаточное отношение определяется как произведение i простейших 4х звенников, т.е.
![]()
![]()
Если связаны параллельной кинетической цепью. Если механизм связан сначала последовательной кинематической цепью, а потом появляется параллельные цепи, то передаточное отношение определяется для каждой цепи отдельно.
![]()
![]()
![]()
![]()
![]()