

2.5. Классификация точек покоя |
53 |
а |
б |
в |
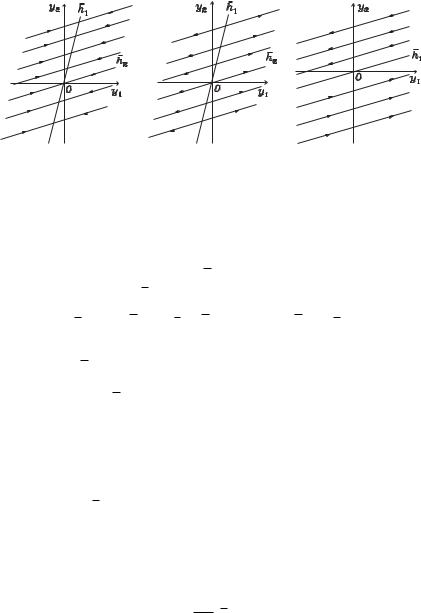
Рис. 2.12. Случай вырожденной матрицы.
Все точки плоскости являются точками покоя в рассматриваемом случае.
Пусть λ1 = λ2 = 0 и dim ker A = 1, то есть существует один линейно
независимый собственный вектор h. Тогда найдется соответствующий присоединенный вектор p. Общее решение (2.31) имеет вид
y(t) = C1h + C2(p + th) = (C1 + C2t)h + C2p.
Вся прямая, проходящая через начало координат параллельно собственному вектору h, состоит из неустойчивых точек покоя. Из остальных точек плоскости движение происходит по прямым, параллельным собственному вектору h, причем направление движения противоположно в полуплоскостях, отвечающих C2 > 0 и C2 < 0. Характер фазовых траекторий представлен на рисунке 2.12в.
2.5.9. Классификация точек покоя нелинейной системы
Точку покоя y0 Rn автономной системы
|
|
(t) |
|
|
|
|
|
|
|
dy |
= |
|
( |
|
(t)) |
(2.35) |
|||
f |
|||||||||
y |
|||||||||
|
dt |
||||||||
|
|
|
|
|
|
|
|||
будем называть грубой, если матрица производных
A = aij , aij = |
∂fi |
(y0), i, j = 1, . . . , n |
(2.36) |
∂yj |

54 |
Глава 2. Теория устойчивости |
имеет ровно n попарно различных собственных значений с ненулевой вещественной частью. Устойчивость по Ляпунову грубой особой точки всегда однозначно определяется с помощью первого метода Ляпунова согласно теореме 2.4.4. Оказывается, что и качественное поведение фазовых траекторий системы (2.35) достаточно полно описывается с помощью линейной системы
dy(t) |
= Ay(t) |
(2.37) |
b |
b |
|
dt |
|
|
в малой окрестности каждой грубой точки покоя.
На плоскости (n = 2) грубой точке покоя соответствует линейная система вида (2.37), имеющая нулевую точку покоя только одного из следующих типов: узел, седло или фокус. Будем называть грубую точку покоя нелинейной системы узлом, седлом или фокусом, если этот тип имеет нулевая точка покоя соответствующий линейной системы (2.37) с матрицей (2.36).
Пример 2.5.1. Определить тип точек покоя системы
dy1/dt = y1 − 1, dy2/dt = y12 − y22.
Точки покоя определяются из алгебраической системы
y1 − 1 = 0,
y12 − y22 = 0,
имеющей два решения: (1, ±1)>. Так как для данной системы
f1(y1, y2) = y12 − y22, f2(y1, y2) = y12 − y22,
то |
∂f1 |
|
∂f1 |
|
∂f2 |
|
∂f2 |
|
||||
|
|
|
|
|
||||||||
|
|
= 1, |
|
|
= 0, |
|
= 2y1, |
|
|
|
= −2y2. |
|
|
∂y1 |
∂y2 |
∂y1 |
|
∂y2 |
|||||||
|
|
|
|
|
|
|
1 |
|
0 |
имеет собственные |
||
Для точки покоя (1, 1)> |
матрица A = 2 |
|
−2 |
|||||||||
значения λ1 |
= 1, λ2 |
= −2. Тогда (1, 1)> – седло. |
|
|||||||||
Для точки покоя (1, −1)> матрица A = |
1 |
0 |
имеет собственные |
|||||||||
2 |
2 |
|||||||||||
значения λ1 |
= 1, λ2 |
= 2. Тогда (1, −1)> – неустойчивый узел. |
||||||||||