

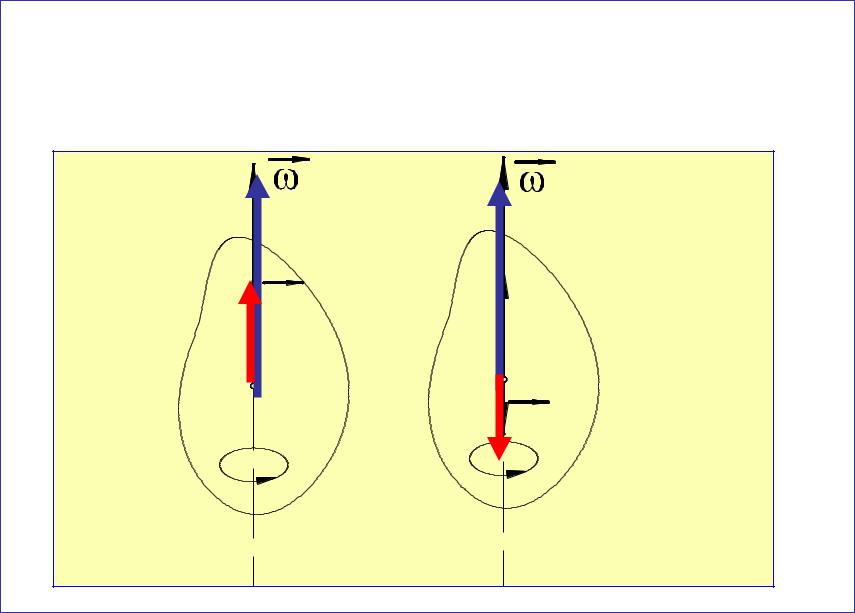
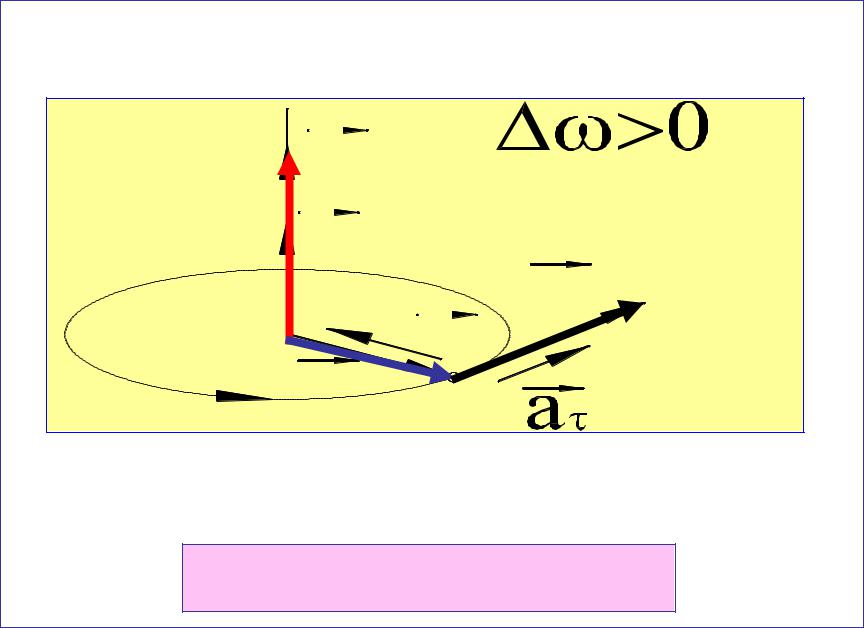
Направление угловой скорости и углового ускорения |
|
при ускоренном (слева) и замедленном (справа) |
|
|
вращении |
a |
á |
|
|
|
|
|
|
Вектор ε направлен вдоль оси вращения в ту же |
|||
сторону, что и |
dω при ускоренном |
|
ω. |
вращении (ε |
) , при замедленном - |
ε |
|
|
ω |
|
|
Модули векторов d , ω и ε соответственно равны
|
d |
|
d |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
d |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
ω dt |
|
|
|
|
|
|
|
|
dω |
|
|
|
|
|
|
|
|
ε dt |
|
|
|
|
|
|

1.5.Взаимосвязь угловых и линейных величин
линейная скорость |
v |
, |
||
тангенциальное |
a τ |
, |
||
нормальное |
an |
и |
|
|
полное a |
линейные ускорения. |
|||
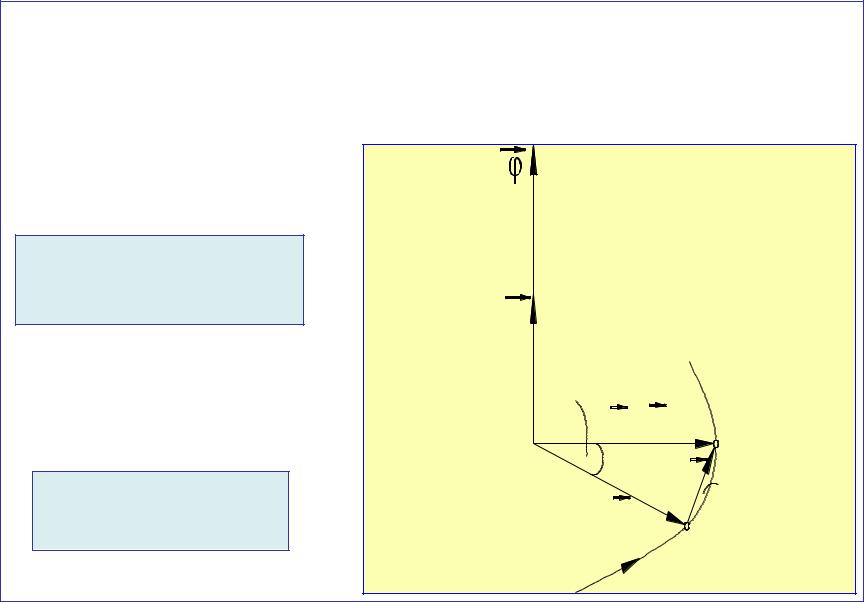
Пусть за время dt произвольная точка твердого тела А |
|||
переместится на |
dr |
, пройдя путь dS. При этом |
|
радиус - вектор точки повернется на угол |
d . |
||
Из геометрии: |
|
d |
|
|
|
|
|
dS d r |
|
|
|
|
|
|
|
Из векторной алгебры |
d |
|
|
в векторном виде: |
|
r+dr |
dr dS |
dr d r |
|
r |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
d . |
|
|
Направление dr |
перпендикулярно к r и к |
r |
||||||
Если смотреть с конца dr |
|
, то поворот от |
d к |
|||||
происходит против часовой стрелки. |
|
|
||||||
Модуль вектора |
dr |
равен |
|
|
|
|
|
|
|
dr |
|
dS d r |
|
||||
|
|
|
||||||
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
d




d
r+dr |
|
|
r |
dr |
dS |
|
|
|
|
|

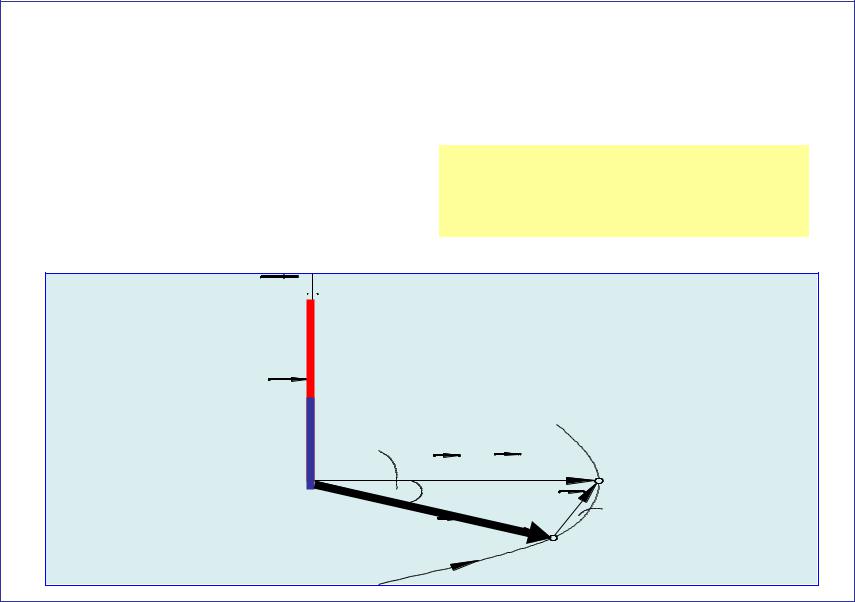
Направление всех векторов при равноускоренном вращении

Вектор элементарного перемещения: |
dr d r |
|
Разделим это соотношение на dt: |
|
dr |
d |
|
|||||||
|
dt |
dt |
r |
||||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|||||
Учтём, что |
dr |
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Получим |
dt |
v |
|
dt ω |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v r |
|
|
|||||
.
Линейная скорость данной точки твёрдого тела равна
векторному произведению угловой скорости на радиус - вектор точки.
Если смотреть с конца вектора v , то поворот от |
ω |
||
к r |
происходит против часовой стрелки. |
|
|
|
|
|
|
|
|
an V |
|
|
r |
|
|
|
|
|
|
Формула, связывающая между собой модули |
|
||
мгновенных линейной и угловой скоростей: |
|
||
|
V r sin 90O r |
|
|
Продифференцируем выражения для v по времени:
|
|
dv |
|
|
d |
|
|
|
|
dr |
|
||||
|
|
dt |
( dt |
r) |
( dt ) |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||
Учтём: |
|
dv |
|
|
|
– линейное ускорение, |
|||||||||
|
|
|
|
dt |
a |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
dω |
|
угловое ускорение, |
||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
dt |
ε |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
dt |
v |
|
|
- линейная скорость. |
|
|
|
|||||||
Получим
a ( r) ( v)
и сравним
a a τ a n
Первый вектор в правой части - тангенциальное
ускорение.
Второй вектор – нормальное ускорение.