

2.6. Неустановившееся движение электропривода при постоянном динамическом моменте
Неустановившееся
механическое
движение электропривода возникает во
всех случаях, когда момент двигателя
отличается от момента нагрузки, т.е.
когда
![]() .
.
Рассмотрение
неустановившегося движения электропривода
имеет своей основной целью получение
зависимостей во времени выходных
механических координат электропривода
– момента
![]() ,
скорости
,
скорости
![]() и положение вала двигателя
и положение вала двигателя
![]() .
Кроме того, часто требуется определить
время неустановившегося движения
(переходного процесса) электродвигателя.
Отметим, что законы изменения моментов
двигателя и нагрузки должны быть
предварительно заданы.
.
Кроме того, часто требуется определить
время неустановившегося движения
(переходного процесса) электродвигателя.
Отметим, что законы изменения моментов
двигателя и нагрузки должны быть
предварительно заданы.
Рассмотрим
неустановившееся движение при постоянном
динамическом моменте
![]() во время пуска электродвигателя.
Предполагается, что во время пуска
электродвигателя
во время пуска электродвигателя.
Предполагается, что во время пуска
электродвигателя
![]() и
и
![]() ,
но
,
но
![]() .
.
Решая уравнение механического движения электропривода, получаем следующую зависимость [2,4]:
![]() ;
(2.13)
;
(2.13)
![]() (2.14)
(2.14)
Уравнение (2.14)
получено с учетом равенств
![]() и
и
![]() .
.
Полагая в уравнении
(2.13)
![]() и
и
![]() ,
находим время изменения скорости от
,
находим время изменения скорости от
![]() до
до
![]()
 .
(2.15)
.
(2.15)
Характеристики
![]() ,
,
![]() ,
,
![]() представлены на рисунке 2.6.
представлены на рисунке 2.6.

Рис. 2.6. Характеристики
![]() ,
,
![]() ,
,
![]() при пуске ЭД
при пуске ЭД
В уравнениях
(2.13), (2.14) и (2.15) момент
![]() принят равным среднему моменту
принят равным среднему моменту
![]() при пуске двигателя, поэтому полученные
выше аналитические соотношения используют
только при выполнении различных
приближенных расчетов в электроприводе.
В частности, неустановившееся движение
может быть рассмотрено при торможении
и реверсе электропривода, или при
переходе с одной характеристики на
другую.
при пуске двигателя, поэтому полученные
выше аналитические соотношения используют
только при выполнении различных
приближенных расчетов в электроприводе.
В частности, неустановившееся движение
может быть рассмотрено при торможении
и реверсе электропривода, или при
переходе с одной характеристики на
другую.
2.7. Неустановившееся движение электропривода при линейной зависимости моментов двигателя и исполнительного органа от скорости
Рассматриваемый вид движения является весьма распространенным.
На рисунке 2.7 представлены механические характеристики ЭД и ИО при пуске электродвигателя.
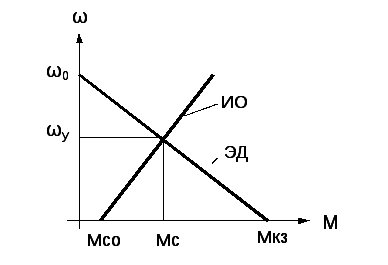
Рис. 2.7. Механические характеристики ЭД и ИО при пуске электродвигателя
Механические характеристики ЭД и ИО можно выразить аналитически следующими уравнениями:
![]() (2.16)
(2.16)
![]() (2.17)
(2.17)
В уравнениях (2.16)
и (2.17)
![]() и
и
![]() – коэффициенты жесткости механических
характеристик ЭД и ИО.
– коэффициенты жесткости механических
характеристик ЭД и ИО.
Подставляя выше
приведенные уравнения в уравнение
механического движения электропривода,
получаем следующие уравнения для
зависимостей
![]() ,
,
![]() ,
,
![]() [2,4].
[2,4].
![]() (2.18)
(2.18)
![]() (2.19)
(2.19)
![]() (2.20)
(2.20)
где
![]() – электромеханическая постоянная
времени в секундах, учитывающая
механическую инерционность привода и
влияющая на время пуска электропривода.
– электромеханическая постоянная
времени в секундах, учитывающая
механическую инерционность привода и
влияющая на время пуска электропривода.
Полученные выражения
(2.18)–(2.20) могут использоваться для
анализа переходных процессов различного
вида, но в каждом конкретном случае
должна быть определена электромеханическая
постоянная времени
![]() ,
а также начальные и конечные значения
координат
,
а также начальные и конечные значения
координат
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
В частном случае, когда
.
В частном случае, когда
![]() и
и
![]() ,
эти величины могут быть определены по
формулам:
,
эти величины могут быть определены по
формулам:
![]() ;
(2.21)
;
(2.21)
![]() ;
;
![]() ,
(2.22)
,
(2.22)
где
![]() –
это время, в течение которого электропривод
запускается до скорости
–
это время, в течение которого электропривод
запускается до скорости
![]() при
при
![]() .
Тогда
.
Тогда
![]() .
Так как обычно момент
.
Так как обычно момент
![]() двигателя при пуске изменяется, то на
практике время пуска в секундах определяют
по выражению
двигателя при пуске изменяется, то на
практике время пуска в секундах определяют
по выражению
![]() ,
или по следующему выражению:
,
или по следующему выражению:
![]() .
.
Зависимости
![]() ,
,
![]() приведены на рисунке 2.8.
приведены на рисунке 2.8.

Рис. 2.8. Зависимости
![]() ,
,
![]() при пуске электродвигателя
при пуске электродвигателя