

8.4. Тормозные режимы ад
Асинхронный двигатель может работать в тех же тормозных режимах, что и двигатель постоянного тока, а именно: в режиме рекуперативного торможения, противовключения и динамическом [1,2,3,4].
Режим рекуперативного
торможения
осуществляется в том случае, когда
скорость ротора АД превышает синхронную
(![]() ).
).
Режим рекуперативного
торможения практически применяется
для двигателей с переключением полюсов
и в приводах грузоподъемных машин
(подъемники, экскаваторы и т.п.) и имеет
место при
![]() .
При переходе в генераторный режим
вследствие изменения знака момента
меняет знак активная составляющая тока
ротора. В этом случае АД отдает активную
мощность (энергию) в сеть и потребляет
из сети реактивную мощность (энергию),
необходимую для возбуждения. Такой
режим возникает, например, при торможении
(переходе) двухскоростного АД с высокой
на низкую скорость, как показано на рис.
8.6а.
.
При переходе в генераторный режим
вследствие изменения знака момента
меняет знак активная составляющая тока
ротора. В этом случае АД отдает активную
мощность (энергию) в сеть и потребляет
из сети реактивную мощность (энергию),
необходимую для возбуждения. Такой
режим возникает, например, при торможении
(переходе) двухскоростного АД с высокой
на низкую скорость, как показано на рис.
8.6а.

а) б)
Рис. 8.6. Торможение АД в основной схеме включения: а) с рекуперацией энергии в сеть; б) противовключением
Предположим,
что в исходном положении АД работал на
характеристике
1 и в точке а, вращаясь со скоростью
![]() .
При увеличении числа пар полюсов АД
переходит на характеристику 2, участок
бс которой соответствует торможению с
рекуперацией энергии в сеть.
.
При увеличении числа пар полюсов АД
переходит на характеристику 2, участок
бс которой соответствует торможению с
рекуперацией энергии в сеть.
Этот же вид
торможения может быть реализован в
системе преобразователь частоты –
двигатель при останове АД или при
переходе с характеристики на характеристику.
Для этого осуществляется уменьшение
частоты выходного напряжения, а тем
самым синхронной скорости
![]() .
В силу механической инерции текущая
скорость АД
.
В силу механической инерции текущая
скорость АД
![]() будет изменяться медленнее чем синхронная
скорость
будет изменяться медленнее чем синхронная
скорость
![]() ,
и будет
постоянно превышать скорость магнитного
поля. За счет этого и возникает режим
торможения с отдачей энергии в сеть.
,
и будет
постоянно превышать скорость магнитного
поля. За счет этого и возникает режим
торможения с отдачей энергии в сеть.
Рекуперативное торможение также может быть реализовано в электроприводе грузоподъемных машин при спуске грузов. Для этого АД включается в направлении спуска груза (характеристика 2 рис. 8.6 б).
После окончания
торможения он будет работать в точке
со скоростью
–![]() .
При этом осуществляется процесс спуска
груза с отдачей энергии в сеть.
.
При этом осуществляется процесс спуска
груза с отдачей энергии в сеть.
Рекуперативное торможение является наиболее экономичным видом торможения.
Перевод АД в режим торможения противовключением может быть выполнен двумя путями. Один из них связан с изменением чередования двух фаз питающего АД напряжения. Допустим, что АД работает на характеристике 1 (рис. 8.6 б) при чередовании фаз напряжения АВС. Тогда при переключении двух фаз (например, В и С) АД переходит на характеристику 2, участок аб которой соответствует торможению противовключением.
Обратим внимание на то обстоятельство, что при противовключении скольжение АД изменяется от S = 2 до S = 1.
Ротор при этом вращается против направления движения поля и постоянно замедляется. Когда скорость спадает до нуля, двигатель должен быть отключен от сети, иначе он может перейти в двигательный режим, причем ротор его будет вращаться в направлении, обратном предыдущему.
При торможении противовключением токи в обмотке двигателя могут в 7–8 раз превышать соответствующие номинальные токи. Заметно уменьшается коэффициент мощности двигателя. О КПД в данном случае говорить не приходится, т.к. и преобразуемая в электрическую механическая энергия и энергия, потребляемая из сети, рассеиваются в активном сопротивлении ротора, и полезно используемой энергии в данном случае нет.
Короткозамкнутые
двигатели кратковременно перегружаются
по току. Правда, у них при (S
> 1) вследствие явления вытеснения тока
заметно возрастает активное сопротивление
ротора. Это приводит к уменьшению
![]() и увеличению момента.
и увеличению момента.
С целью увеличения эффективности торможения двигателей с фазным ротором в цепи их роторов вводят добавочные сопротивления, что позволяет ограничить токи в обмотках и увеличить момент.
Другой путь
торможения противовключением может
быть использован при активном характере
момента нагрузки, который создается,
например, на валу АД грузоподъемного
механизма. Допустим, что требуется
осуществить спуск груза, обеспечивая
его торможение с помощью АД. Для этого
АД путем включения в цепь ротора
добавочного резистора (сопротивления)
переводится на искусственную характеристику
(прямая 3 на рис. 8.6б). Вследствие превышения
моментом нагрузки Мс пускового момента
Мп АД и его активного характера груз
может опускаться с установившейся
скоростью –![]() .
В этом режиме торможение скольжения АД
может изменяться от S
= 1 до S
= 2.
.
В этом режиме торможение скольжения АД
может изменяться от S
= 1 до S
= 2.
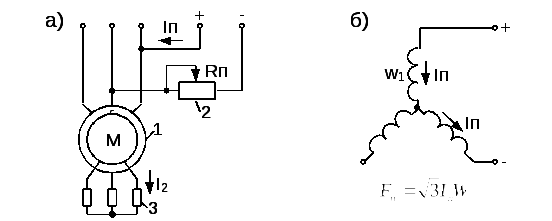
Для динамического торможения обмотки статора АД отключают от сети переменного тока и подключают к источнику постоянного тока, как это показано на рис. 8.7. Обмотка ротора АД 1 при этом может быть закорочена, или в ее цепь включаются добавочные резисторы с сопротивлением R2д.
а) б)
Рис. 8.7. Схема динамического торможения АД (а) и схема включения обмоток статора (б)
Постоянный ток Iп, значение которого может регулироваться резистором 2, протекает по обмоткам статора и создает относительно статора неподвижное магнитное поле. При вращении ротора в нем наводится ЭДС, частота которой пропорциональна скорости. Эта ЭДС, в свою очередь, вызывает появление тока в замкнутом контуре обмотки ротора, который создает магнитный поток, также неподвижный относительно статора. Взаимодействие тока ротора с результирующим магнитным полем АД создает тормозной момент, за счет которого достигается эффект торможения. Двигатель в этом случае работает в режиме генератора независимо от сети переменного тока, преобразовывая кинетическую энергию движущихся частей ЭП и рабочей машины в электрическую, которая рассеивается в виде тепла в цепи ротора.
На рисунке 8.7 б показана наиболее распространенная схема включения обмоток статора при динамическом торможении. Система возбуждения АД в этом режиме является несимметричной. Для проведения анализа работы АД в режиме динамического торможения несимметричную систему возбуждения заменяют симметричной. С этой целью принимается допущение, что статор питается не постоянным током Iп, а некоторым эквивалентным трехфазным переменным током, создающим такую же МДС (магнитодвижущую силу) АД, что и постоянный ток.
Опуская выводы,
эквивалентный ток для схемы (рис. 8.7 б)
определится как Iэкв
= 0,816 Iп,
а уравнение для электромеханической
характеристики
![]() запишется в виде
запишется в виде
 ,
(8.26)
,
(8.26)
где
![]() – индуктивное сопротивление контура
намагничивания.
– индуктивное сопротивление контура
намагничивания.
При
![]() и
и
![]() ,ток
,ток
![]() оказывает размагничивающее действие
на АД. Тогда как при неподвижном роторе
намагничивающий ток
оказывает размагничивающее действие
на АД. Тогда как при неподвижном роторе
намагничивающий ток
![]() и определяемый им магнитный поток
и определяемый им магнитный поток![]() ,
минимальны. Ели пренебречь последним
фактором и считать, что
,
минимальны. Ели пренебречь последним
фактором и считать, что
![]() ,
то текущие значения моментов, максимальный
момент и скольжение можно определять
по следующим формулам [1,2]:
,
то текущие значения моментов, максимальный
момент и скольжение можно определять
по следующим формулам [1,2]:
![]() ;
(8.27)
;
(8.27)
 ;
(8.28)
;
(8.28)
![]() .
(8.29)
.
(8.29)
Электромеханическая
![]() и механические
и механические
![]() характеристики представлены на рис.
8.8.
характеристики представлены на рис.
8.8.

Рис. 8.8.
Электромеханическая
![]() и механические
и механические
![]() характеристики АД
характеристики АД
Характеристика
![]() расположена на рисунке в первом квадранте
I,
где
расположена на рисунке в первом квадранте
I,
где
![]() – скольжение АД в режиме динамического
торможения. Механические характеристики
АД расположены во втором квадрантеII.
– скольжение АД в режиме динамического
торможения. Механические характеристики
АД расположены во втором квадрантеII.
Различные
искусственные характеристики АД в
режиме динамического торможения можно
получить, изменяя сопротивление
![]() добавочных резисторов 3 (рис. 8.7) в цепи
ротора или постоянный ток
добавочных резисторов 3 (рис. 8.7) в цепи
ротора или постоянный ток![]() ,
подаваемый в обмотки статора. На рисунке
8.8 показаны механические характеристики
АД для различных сочетаний
,
подаваемый в обмотки статора. На рисунке
8.8 показаны механические характеристики
АД для различных сочетаний![]() и
и![]() .
Характеристика 6 соответствует току
.
Характеристика 6 соответствует току![]() и сопротивлению резистора
и сопротивлению резистора![]() ,
максимальный момент на ней равен
,
максимальный момент на ней равен![]() ,
а скольжение, ему соответствующее,
,
а скольжение, ему соответствующее,![]() .
Увеличение сопротивления резисторов
3 (
.
Увеличение сопротивления резисторов
3 (![]() )
при
)
при![]() не приводит к изменению максимального
момента, в то время как максимальное
скольжение
не приводит к изменению максимального
момента, в то время как максимальное
скольжение![]() при этом пропорционально возрастает,
что видно из характеристики 4.
при этом пропорционально возрастает,
что видно из характеристики 4.
Увеличение тока
![]() при
при![]() вызывает увеличение максимального
момента пропорционально квадрату тока.
Характеристика двигателя в этом случае
имеет вид кривой 5. Варьируя значения
вызывает увеличение максимального
момента пропорционально квадрату тока.
Характеристика двигателя в этом случае
имеет вид кривой 5. Варьируя значения![]() и
и![]() ,
можно получить желаемый вид механических
характеристик АД в режиме динамического
торможения и, тем самым, соответствующую
интенсивность торможения асинхронного
ЭП.
,
можно получить желаемый вид механических
характеристик АД в режиме динамического
торможения и, тем самым, соответствующую
интенсивность торможения асинхронного
ЭП.