

5.4. Автоматический пуск и динамическое торможение эд
Схема пуска и динамического торможения ЭД приведена на рисунке 5.5.
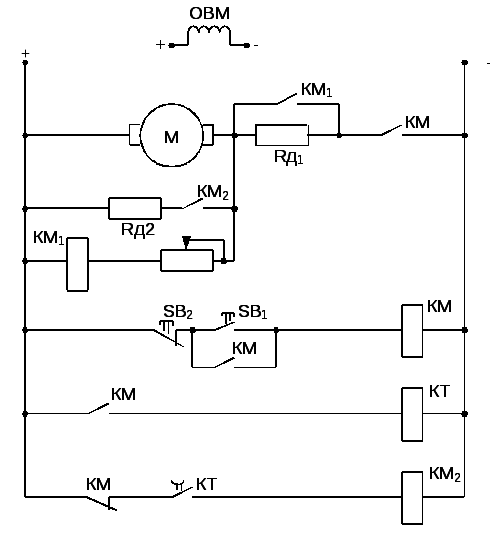
Рис. 5.5. Схема пуска и динамического торможения ДПТ НВ
Пуск ЭД осуществляется в функции ЭДС. Для этого необходимо нажать на кнопку SB1. После срабатывания контактора КМ мгновенно в прямом направлении срабатывает реле времени КТ.
Для останова ЭД необходимо нажать на кнопку SB2. В результате чего отключается контактор КМ и включается контактор КМ2. Якорь ЭД замыкается на тормозное сопротивление Rд2, и происходит динамический режим торможения. Реле времени, отсчитав выдержку времени при нулевой скорости, размыкает свой контакт. Катушка контактора КМ2 теряет питание, и схема приходит в исходное положение для повторного включения ЭД.
Анализируя приведенные схемы автоматического пуска и торможения ДПТ НВ при питании его от сети, можно сделать следующие выводы. Пуск, торможение (как и реверс) ДПТ осуществляются с помощью релейно-контакторных схем управления. При их автоматизации используются принципы времени, скорости и тока.
Реализация указанных принципов осуществляется с помощью соответствующих датчиков, от которых в схему управления поступает информация о текущих значениях скорости, тока или времени.
Некоторые схемы управления строятся по принципу пути, когда с помощью конечных или путевых выключателей осуществляется контроль за углом поворота вала ДПТ.
Статические механические характеристики при пуске и кривые переходного процесса при динамическом торможении ЭД приведены на рисунке 5.6 [1].

Рис. 5.6. Статические механические характеристики при пуске и кривые переходного процесса при динамическом торможении ЭД
Со схемой автоматического пуска и реверса ЭД и механическими переходными процессами при активном и реактивном моментах сопротивления можно ознакомиться в рекомендуемой учебной литературе.
5.5. Электромеханические переходные процессы при учете индуктивности цепи якоря Lя
Индуктивность
цепи якоря Lя
(в генри) ДПТ
оказывает существенное влияние на
характер переходных процессов (на
зависимости
![]() и
и
![]() в электроприводе. В первую очередь ее
влияние проявляется в незначительном
ограничении пиков тока в якоре и
значительном увеличении времени
переходных процессов.
в электроприводе. В первую очередь ее
влияние проявляется в незначительном
ограничении пиков тока в якоре и
значительном увеличении времени
переходных процессов.
При определенных
соотношениях механической и электромагнитной
постоянных времени, а именно при
![]() переходные процессы в электроприводе
имеют колебательный характер. Для
примера на рисунке 5.7 показаны кривые
изменения момента и скорости ДПТ НВ при
пуске под нагрузкой, отражающие это
положение [1].
переходные процессы в электроприводе
имеют колебательный характер. Для
примера на рисунке 5.7 показаны кривые
изменения момента и скорости ДПТ НВ при
пуске под нагрузкой, отражающие это
положение [1].
Из-за колебательного
характера процесса увеличивается время
пуска и перерегулирование скорости.
Отметим также, что наличие индуктивности
привело к некоторому запаздыванию
![]() при пуске, которое определяется временем
нарастания момента ДПТ до момента
нагрузки Мс.
при пуске, которое определяется временем
нарастания момента ДПТ до момента
нагрузки Мс.

Рис. 5.7. Изменение момента (а) и скорости (б) при пуске ДПТ НВ при существенной индуктивности цепи якоря
Индуктивность якоря нарушает в переходных процессах однозначную связь между скоростью и моментом ДПТ, определяемую его статической механической характеристикой. Это обстоятельство может привести в переходных процессах (например, сброса или наброса нагрузки) к существенно большим динамическим перепадам скорости по сравнению со статическими, которые соответствуют статической механической характеристике.
При питании ДПТ от сети индуктивность в цепи якоря в переходных процессах проявляется, как правило, не очень сильно. Определяется это тем обстоятельством, что для ограничения переходных токов в цепь якоря вводятся дополнительные резисторы, которые значительно уменьшают постоянную времени Тя и увеличивают электромеханическую постоянную времени Тм. В этом случае в электроприводе будет протекать механический переходный процесс (он был рассмотрен ранее). В то же время при питании ДПТ от вентильного преобразователя, когда в цепь якоря включаются сглаживающие и уравнительные реакторы, индуктивность якорной цепи может оказывать существенное влияние на переходные процессы.