

5.2. Автоматический пуск эд в функции тока
Схема пуска приведена на рисунке 5.2.

Рис. 5.2. Схема автоматического пуска ЭД в функции тока
В схеме: КА1 и КА2 – реле тока. Эти реле в прямом направлении срабатывают при токе I1 =2.5 Iян, а в обратном направлении при токе I2 = 1,2 Iян.
Время срабатывания
КА1
и КА2
значительно меньше времени срабатывания
контакторов КМ1
и КМ2
, т. к.
![]()
![]() .
.
Для пуска ЭД необходимо нажать на кнопку SB1. Команду на шунтирование секций Rд1 и Rд2 подают реле тока КА1 и КА2. Секции пускового реостата шунтируются контакторами КМ1 и КМ2.
5.3. Автоматический пуск эд в функции времени
Схема пуска приведена на рисунке 5.3.
В схеме: КТ1 и КТ2 – реле времени.
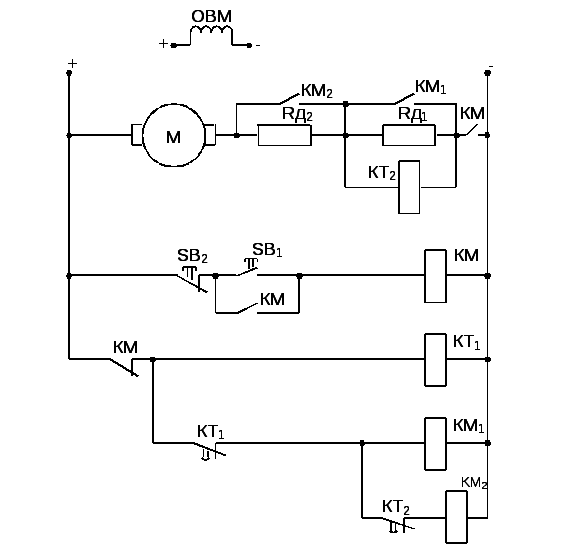
Рис. 5.3. Схема автоматического пуска ЭД в функции времени
Работа схемы при пуске ЭД происходит следующим образом. При подаче напряжения на схему происходит возбуждение ЭД, и срабатывает реле КТ1, размыкая свой контакт в цепи катушки контактора КМ1. Схема подготовлена к пуску.
Пуск ЭД происходит нажатием кнопки SВ1, в результате чего получает питание контактор КМ. Включившись, он своим главным контактом КМ подключает ЭД к напряжению сети.
Двигатель начинает
разбег с резисторами (сопротивлениями
секций) Rд1
и Rд2
в цепи якоря. Одновременно замыкающий
вспомогательный контакт контактора
КМ шунтирует кнопку SВ1
и она может быть отпущена оператором,
а размыкающий вспомогательный контакт
КМ разрывает цепь питания реле времени
КТ1.
Реле КТ1,
потеряв питание, начинает отсчет времени,
соответствующий времени работы ЭД на
первой искусственной механической
характеристике. При скорости
![]() ,
что соответствует времени пуска
,
что соответствует времени пуска![]() ,
реле КТ1
срабатывает в обратном направлении,
замыкая свой контакт в цепи катушки
контактора КМ1.
Последний включается и своим главным
контактом закоротит резистор Rд1
в цепи якоря и обесточит катушку реле
КТ2.
До этого реле КТ2
было включено в прямом направлении при
протекании тока в якорной цепи. Двигатель
продолжает свой разбег по второй
искусственной механической характеристике.
При скорости
,
реле КТ1
срабатывает в обратном направлении,
замыкая свой контакт в цепи катушки
контактора КМ1.
Последний включается и своим главным
контактом закоротит резистор Rд1
в цепи якоря и обесточит катушку реле
КТ2.
До этого реле КТ2
было включено в прямом направлении при
протекании тока в якорной цепи. Двигатель
продолжает свой разбег по второй
искусственной механической характеристике.
При скорости
![]() ,
что соответствует времени пуска
,
что соответствует времени пуска![]() ,
реле КТ2
срабатывает в обратном направлении,
замыкая свой контакт в цепи катушки
контактора КМ2.
Последний включится и своим главным
контактом закоротит резистор Rд2
в цепи якоря. Двигатель выйдет на свою
естественную характеристику, по которой
и продолжит свой разбег до точки
установившегося режима за время
,
реле КТ2
срабатывает в обратном направлении,
замыкая свой контакт в цепи катушки
контактора КМ2.
Последний включится и своим главным
контактом закоротит резистор Rд2
в цепи якоря. Двигатель выйдет на свою
естественную характеристику, по которой
и продолжит свой разбег до точки
установившегося режима за время
![]() .
Таким образом осуществился пуск ЭД в
три этапа.Для
остановки ЭД
необходимо нажать на кнопку SВ2.
.
Таким образом осуществился пуск ЭД в
три этапа.Для
остановки ЭД
необходимо нажать на кнопку SВ2.
Схема надежна, имеет более высокую точность в работе. Поэтому на практике она получила наибольшее применение.
Пусковая диаграмма и кривые переходного механического процесса при пуске ДПТ приведены на рисунке 5.4.
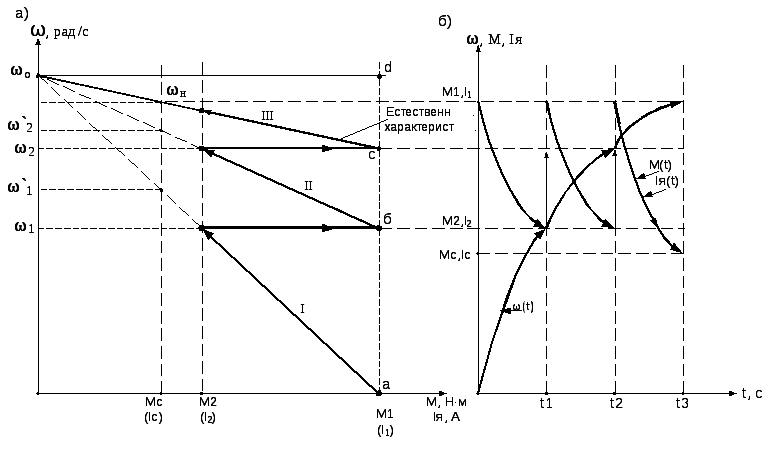
а) б)
Рис. 5.4. Пусковая диаграмма (а) и кривые переходного процесса (б)
Методика расчета механического переходного процесса приведена ниже [2,3].
1 этап
![]()
![]()
![]()
![]()
![]()
2 этап
![]()
![]()
![]()
![]()
![]() ;
;
![]()
3 этап
![]()
![]()
![]()
![]()
![]() ;
;
![]() –проверка на
верность расчетов;
–проверка на
верность расчетов;
![]()
Полученных четырех точек на каждой ступени (этапе пуска) достаточно для построения кривых скорости, момента ( тока ) при пуске двигателя.
Сопротивления секций пускового реостата определяются по следующим выражениям:
![]()
![]() ;
;
![]() ;
;
![]() .
.