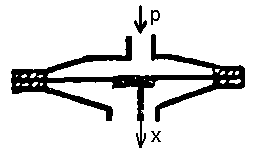
11. Система автоматического регулирования давления
На рис.28показана система
автоматического регулирования давления. Рис.
28. Система автоматического регулирования
давления
Рис.
28. Система автоматического регулирования
давления
Датчик давления 2 настроен на определенное давление в ресивере 1. При отклонении давления pkот заданного значения мембрана датчика 2 прогибается и через шток смещает трубку струйного усилителя 3. В результате возникает разность давлений в цилиндре гидравлического двигателя 4 и поршень двигается, поворачивая заслонку 5, таким образом изменяется подача газа, чтобы привести давление pkк заданному значению. Работа мембранного датчика с трубкой струйного усилителя описывается уравнениемx=kMΔp, гдеx– смещение конца струйной трубки,p– отклонение давления от заданного, которое определяется настройкой датчика,kM– коэффициент пропорциональности.
Блок-схема системы представлена на рис. 29. Исходные данные приведены в табл.14.
 Рис.
29. Блок-схема системы автоматического
регулирования давления.
Рис.
29. Блок-схема системы автоматического
регулирования давления.
Таблица 14
Исходные данные
|
Звено |
Параметр |
Значение | ||
|
вариант 1 |
вариант 2 |
вариант 3 | ||
|
Мембранный датчик с трубкой |
kМ, м/Па |
10–8 |
2∙10–8 |
10–8 |
|
Струйная трубка |
kС, Па/м |
2∙108 |
2∙108 |
3∙108 |
|
Поршень с рычагом и заслонкой |
kП, рад/Па |
10–5 |
2∙10–5 |
2∙10–5 |
|
Ресивер |
ТР, с |
10 |
12 |
15 |
|
kР, Па/рад |
4∙105 |
4∙105 |
4∙105 | |
Уравнения элементов сау
Ниже приведены уравнения элементов систем автоматического управления, которые используются при построении систем в вариантах заданий п. 2.
|
|
Гидравлический серводвигатель (гидропривод)
, где x – перемещение штока поршня; xк– перемещение штока золотника; TГ– постоянная времени; kД– коэффициент передачи.
| ||||
|
|
Дизель
, где l– положение рейки топливного насоса; – угловая скорость вращения вала дизеля; TД– постоянная времени дизеля; kД– коэффициент передачи дизеля.
| ||||
|
|
Центробежный тахометрический датчик
, где x – перемещение нижней ползушки; – угловая скорость вращения; T, , k – параметры датчика.
| ||||
|
|
Гидравлическое корректирующее устройство изодромного типа (изодром)
, где TИ– постоянная времени изодрома.
| ||||
|
|
Гидротурбина Уравнение турбины в отклонениях от установившегося режима , где – относительное отклонение угловой скорости от установившегося значения 0; – относительное перемещение задвижки 3, z0– положение задвижки в установившемся режиме; – постоянная времени гидротурбины, где JП– момент инерции турбины; M0– момент сопротивления в установившемся режиме.
| ||||
|
|
Сушильная башня для производства серной кислоты , где x(t) – напряжение с газоанализатора, пропорциональное относительной концентрации газа SO2в смесителе; l(t) – положение заслонки; T1, T2– постоянные времени; k – коэффициент передачи. | ||||
|
|
Электромашинный усилитель , где kУ– коэффициент усиления ЭМУ; TУ– постоянная времени.
| ||||
|
|
Тахогенератор UТ= kТ, где – угл. скорость вращения вала; UТ– напряжение; kТ– коэффициент передачи.
| ||||
|
|
Корректирующая RC-цепь , где U1– входное напряжение; U2– выходное напряжение; TK= R∙C – постоянная времени цепи.
| ||||
|
|
Термосопротивление в мостовой схеме UT= kT, где kT– коэффициент передачи измерителя; – отклонение температуры от номинального значения; UT– напряжение.
| ||||
|
|
Теплообменник , где kТО– передаточный коэффициент теплообменника; T1, T2– постоянные времени теплообменника; – температура; – угол поворота заслонки.
| ||||
|
|
Электрический двухфазный двигатель переменного тока , где TД–постоянная времени двигателя; kД– коэффициент передачи двигателя; uу– напряжение на управляющей обмотке; дв– угл. скорость вращения вала. | ||||
|
|
Струйная трубка p = p1– p2= kch, где h – отклонение конца трубки от среднего положения; p1, p2– значения давлений в выходных каналах; kc– постоянный коэффициент, зависящий от конструкции трубки и входного давления. | ||||
|
|
Электромагнитный усилитель , где U1– входное напряжение; U2– выходное напряжение; kM– коэффициент усиления; TM– постоянная времени магнитного усилителя. | ||||
|
|
Поворотный пневматический двигатель = kПp, где p=p1–p2– перепад давлений; – угол поворота вала двигателя; kП– коэффициент передачи двигателя. | ||||
|
|
Самолет (угол тангажа)
, где – угол тангажа; В– угол отклонения руля высоты; kС, TС, TС1,С– параметры самолета. | ||||
|
|
Потенциометр U = kп, где U – напряжение; – угол поворота движка потенциометра; kп– коэффициент передачи. | ||||
|
|
Угольный регулятор , где U – напряжение на обмотке электромагнита; R – сопротивление угольного столба; TУ– постоянная времени; У– коэффициент затухания; kУ– коэффициент передачи. | ||||
|
|
Генератор постоянного тока напряжение генератора UГпропорционально току в обмотке возбуждения iВи частоте вращение вала генератора: UГ= ciВ= kГiВ, где kГ= c– коэффициент передачи генератора (частоту вращениясчитаем постоянной). | ||||
|
|
Трансформатор , где U1– входное напряжение; U2– выходное напряжение; TT = LТР / RТР; LТР, RТР– индуктивность и сопротивление первичной обмотки трансформатора; kT=– коэффициент трансформатора, где w1, w2– число витков первичной и вторичной обмоток. | ||||
|
|
Индуктивный датчик U= kД, где – смещение; U– выходное напряжение датчика. | ||||
|
|
Электрический двигатель постоянного тока , где TД–постоянная времени двигателя; kД– коэффициент передачи двигателя; U – напряжение на управляющей обмотке; – угловая скорость вращения вала. | ||||
|
|
Электромагнит x = kMU, где x – перемещение сердечника магнита; U – напряжение на обмотке магнита; kM– коэффициент передачи электромагнита. | ||||
|
|
Ресивер Tp+ p = kp, где p – давление в ресивере; – угол поворота заслонки; Tp, kp– параметры ресивера.
| ||||
|
|
Мембранный датчик давления x = kДp, где p – отклонение давления от заданного значения; x – перемещение мембраны; kД–коэффициент передачи датчика. | ||||
|
|
Поршень с рычагом и заслонкой = kПp, где – угол поворота заслонки; p – перепад давлений на поршне; kП– коэффициент передачи. | ||||