

Тема 26. Реализация программного управления в цифровых системах коммутации. Архитектура управляющих устройств на базе микропроцессоров. Способы разделения функций управления и структурная организация управляющих систем
В цифровых АТС функции управления реализуются программным способом. При этом стоимость разработки программного обеспечения (ПО) составляет более 80% стоимости разработки станции и ПО практически полностью определяет функциональные возможности АТС.
Функции управления узлом коммутации принято разделять на три уровня.
Функции управления первого уровня связаны с работой абонентских, сетевых, станционных интерфейсов узла коммутации и поддержкой задач нижнего уровня обработки вызова – передача, прием, преобразование сигнализации.
Функции управления второго уровня связаны с процессом обслуживания вызова. Например, на этом уровне анализируются набранные абонентом цифры, выбирается путь через коммутационное поле, выполняется управление соединением и его разрушение.
Функции управления третьего уровня связаны с техническим обслуживанием, конфигурацией, администрированием, статистикой и начислением платы.
На сегодняшний день архитектуры управления АТС с программным управлением разделяют на три типа: централизованное управление, иерархическое управление, распределенное управление.
При централизованном управлении (рис. 26.1) процессор устройства управления выполняет управление всеми комплектами станции, управление обслуживанием вызова, управление коммутацией, контроль, диагностику и восстановление системы. Таким образом, процессор УУ выполняет все функции управления и должен обладать достаточной вычислительной мощностью. Блок предварительной обработки информации выполняет согласование параметров сигналов и обеспечивает подключение к процессору УУ большого числа линий.
Архитектура иерархического управления отличается от архитектуры, приведенной на рис. 26.1 тем, что она предусматривает несколько периферийных процессоров. Периферийные процессоры оказывают помощь центральному процессору, беря на себя функции управления отдельными периферийными подсистемами станции (абонентскими модулями, модулями соединительных линий и др.). Они определяют состояние управляемых объектов, сообщают об изменении состояния центральному процессору, получают команды управления объектами подсистемы и вырабатывают управляющие сигналы. Центральный процессор выполняет основные функции обработки вызовов и управления

коммутационным узлом в целом и несет при этом меньшую нагрузку, чем тот же процессор в архитектуре централизованного управления. В результате, как правило, пропускная способность управляющей системы увеличивается.
Рис. 26.1. Структура АТС с централизованным программным управлением
Определенный недостаток этой архитектуры – ограниченная масштабируемость управляющего комплекса по мере роста емкости АТС, т.к. вся обработка вызовов централизована. Кроме того, восстановление системы в случае сбоя полностью зависит от центрального процессора.
Архитектура распределенного управления (архитектура без центрального процессора) предусматривает разбиение множества задач управления на несколько составных частей по принципу разделения функций и/или разделения нагрузки. Специализированные наборы задач выполняются независимыми процессорами, совместная работа которых обеспечивает выполнение всех связанных с управлением операций. Процессоры общаются друг с другом путем обмена сообщениями через коммутационное поле, общую шину или иным способом.
Основные свойства программного обеспечения не являются уникальными. Они присущи многим системам, использующим программное обеспечение. Программное обеспечение станций имеет следующие характерные свойства.
1.Это «большое программное обеспечение», основные признаки которого:
- создается коллективом специалистов свыше 100 человек; - имеет объем более 100 000 строк текста;
- обновляется и дополняется в течение всего жизненного цикла системы.
2.Функционирует с системой, работающей в реальном масштабе времени. Это означает, что:
- задача (например, установление соединения) должна быть решена за определенное время (иногда миллисекунды), после которого ее решение становиться бессмысленным;
-решение задачи происходит в ситуации, которая может изменяться
втечение времени ее решения (освобождение и блокировка путей, выход из строя ресурсов и ошибочные действия пользователей).
Кроме того, для таких программ характерен промышленный подход, основными признаками которого являются:
1.Массовость изделия и его длительный срок службы при эксплуатации в непрофессиональной (в смысле программирования) среде.
2.Отчуждаемость и устойчивость к будущему. Эти понятия подразумевают возможность установки, дополнения, коррекции и замены компонентов и ПО в целом без привлечения его создателей.
3.Простота обслуживания. Она подразумевает наличие средств, контролирующих исполнение действий программы и реакцию окружающей среды, а также касается создания «дружественного» интерфейса.
При создании программного обеспечения систем коммутации используется различные системы программирования и языки программирования. В большинстве современных систем программирования используется объектно-ориентированный подход. Основу этого подхода составляют следующие понятия:
Класс – структура, которая может иметь в своем составе переменные, функции и процедуры. Переменные в зависимости от предназначения именуются полями или свойствами. Процедуры и функции класса – методами. Соответствующий классу тип называется объектным типом. Переменная объектного типа называется экземпляром класса или объектом.
Поля объекта – это данные, уникальные для каждого созданного в программе экземпляра класса. Они предназначены для использования внутри класса.
Свойства объекта обеспечивают обмен данными с внешней средой. Свойство определяется тремя элементами: полем и двумя методами, которые осуществляют его чтение/запись.
Методы – это процедуры и функции, описанные внутри класса и предназначенные для операций над его полями.
Суть объектно-ориентированного программирования составляют три принципа – инкапсуляция, наследование и полиморфизм.
Инкапсуляцией называется правило ООП, утверждающее что чтение
иобновление содержимого полей должно производиться посредством вызова соответствующих методов.
Принцип наследования позволяет создавать новый класс (класс потомок или дочерний класс), используя поля и методы существующего
класс (класса предка или родительского класса) и добавляя к ним новые поля, методы и свойства.
Принцип полиморфизма заключается в следующем. Указателю на объект может быть присвоен адрес любого экземпляра любого из дочерних типов. Если дочерние классы имеют метод, унаследованный от родительского класса с сохранением наименования и типа, но с собственным содержимым, то при вызове метода через указатель на объект будет вызван метод, который соответствует классу фактически переданного объекта.
Спомощью ООП в программе может быть представлена информация
ореальных объектах коммутационной станции: комплектах АЛ и СЛ, коммутационном поле, МЧПП и т.д. Рассмотрим пример программного объекта комплект аналоговой абонентской линии.
Согласно концепции объекта, он имеет свойства, необходимые для работы с этим объектом. Например, это могут быть:
- Тип комплекта. Это свойство позволяет определить перечень программ обработки абонентского вызова.
- Номер комплекта. На станции может быть сотни тысяч комплектов одного типа. Номер позволяет определить, с каким из них надо работать.
- Состояние комплекта. Это свойство указывает, на каком этапе находится работа, осуществляемая внешним окружением с этим комплектом (комплект свободен, занят, заблокирован т.д.) Значение этого свойство в отличие от рассмотренных выше свойств меняется в процессе работы.
Спомощью программных объектов может быть представлена информация о виртуальных (воображаемых) объектах. Эти объекты не существуют реально, но описаны логически и отображаются в памяти. Одним из таких объектов является соединение.
Для многих систем соединение можно представить как совокупностью приборов, участвующих в организации соединения.
Рассмотрим пример реализации программного объекта соединение (рис. 26.2). В этом примере абонентские комплекты (АК1 и АК2) соединены через КП с модулем многочастотного приемопередатчика (МЧПП).
Впрограмме соединение отображается с помощью адресов связи, т.е. адресов программных объектов, представляющих устройства участвующие в соединении. Соединение может быть представлено двумя способами:
децентрализованным (рис. 26.2, б) и централизованным (рис. 26.2, в).
При децентрализованном способе соединение отображается с помощью записи номера и типа предыдущего устройства в переменной
адрес связи (NСВ) последующего устройства (это показано стрелками на рисунке). Для надежности запись типа и номера последнего устройства дублируется в адресе связи первого устройства.
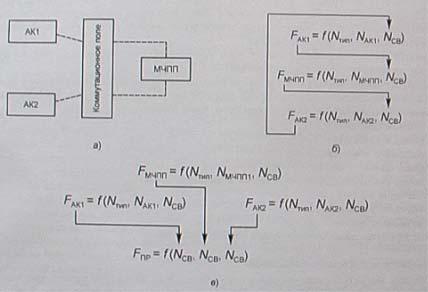
При централизованном способе создается новый объект, в переменных которого хранятся адреса связи участников соединения. Объект соединение может иметь и другие свойства, например, категорию соединения.
Для некоторых систем соединение представляется с помощью параметров виртуального пути или канала.
Рис. 26.2. Принцип создания и отображения объекта соединение:
а) условное отображение соединения реального оборудования; б) распределенное отображение соединения с помощью адреса связи;
в) централизованное отображение соединения с помощью адреса связи;
При создании программного обеспечения широко используется метод универсальной программы. Суть состоит в том, что универсальная программа не должна обязательно содержать в себе все другие программы.
Она должна уметь кодировать и декодировать номера всех программ,
которые могут быть записаны и допустимы на заданном языке программирования.
Метод универсальной программы использует модель конечного автомата с памятью. Согласно рекомендациям ITU-T Z.100 – Z.104, для представления алгоритмов предложен язык спецификаций и описаний SDL (Specification and Description Language). Он также опирается на понятие
конечный автомат. Поэтому этот подход позволяет осуществить переход от алгоритмов различных уровней к программе.
Модель синхронного автомата с памятью представляется следующим образом:
А=<X, Y, S, λ, δ>, где
X={x1, …, xn} – множество входных сигналов, Y={y1, …, ym} – множество выходных сигналов, S={S1, …, Sk} – множество внутренних состояний,
S(t+1)=λ(X(t), S(t)) – функции переходов,
y(t)=δ(X(t),S(t)) – функции выходов.
Следуя этим выражениям, алгоритм можно представить как последовательное вычисление рекурсивной функции, которая по входным сигналам и текущему состоянию определяет новое состояние и значение выходов. Смена состояний называется переход. Переход из одного состояния в другое сопровождается выполнением действий при переходе.
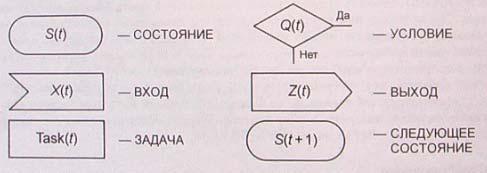
В рекомендациях ITU-T Z.100 – Z.104 для представления алгоритмов введены следующие определения:
-СОСТОЯНИЕ обозначает положение процесса, при котором он приостановлен до получения сигнала ВХОД;
-ВХОД действие, которое передает алгоритму информацию от внешнего окружения или другого алгоритма и инициирует ПЕРЕХОД;
-ЗАДАЧА действие, не определенное ни одним из приведенных терминов;
-УСЛОВИЕ это действие, при котором выбирается один из нескольких возможных путей продолжения процесса;
-ВЫХОД действие, которое передает сигнал внешнему окружению или другому алгоритму.
При разработке и использовании алгоритмов следует различать различные уровни алгоритмов, которые соответствуют уровням абстракции и применяемым языкам программирования. В частности, алгоритм-спецификация – это описание процесса на уровне заказчика или эксплуатационного персонала (что должна делать система). Алгоритмописание – алгоритм, отображающий реализацию алгоритмаспецификации (как это реализуется).
Согласно рекомендациям для изображения алгоритмов применяют следующие обозначения (рис. 26.3).
Рис. 26.3. Условное обозначение блоков алгоритмов
На рис. 26.4 приведен простой алгоритм, выполненный в соответствии с автоматным подходом и написанный на языке SDL. Этот же алгоритм отображен с помощью таблицы соответствий (табл. 26.1), в которой применяется нумерация операторов, заданная в табл. 26.2 – 26.6.

Рис. 26.4. Фрагмент алгоритма перехода из исходного состояния в состояние «прием номера»:
S(t), S(t+1) – СОСТОЯНИЯ в текущий и следующий момент времени; х(t) – ВХОД (входной сигнал); Q1 – УСЛОВИЕ 1 (результат поиска путей); Task1 – заявка на ЗАДАЧУ1 (алгоритм поиска путей);
Task2 – заявка на ЗАДАЧУ2 (передача команд); Task3 – заявка на ЗАДАЧУ3 (установка таймера);
Таблица 26.1. Таблица соответствия для алгоритма на рис 26.4
№ строки |
S(t) |
x(t) |
Task1(t) |
Q1 |
Task2(t) |
Task3(t) |
S(t+1) |
1 |
1 |
1 |
2.1 |
1 |
3.3 |
4.1 |
2 |
2 |
|
|
- |
0 |
3.1 |
- |
3 |
3 |
3 |
2 |
- |
- |
3.2 |
- |
1 |
Таблица 26.2. Кодирование оператора СОСТОЯНИЕ
Наименование оператора СОСТОЯНИЕ |
Числовое значение |
Свободно |
1 |
Ожидание первой цифры |
2 |
Ожидание отбоя абонента |
3 |
Таблица 26.3. Кодирование оператора ВХОД
Наименование оператора ВХОД |
Числовое значение |
Абонент снял трубку |
1 |
Абонент положил трубку |
2 |
Таблица 26.4. Кодирование оператора УСЛОВИЕ
Наименование оператора УСЛОВИЕ |
Числовое значение |
Свободный МЧПП найден (Q1) |
ДА – 1 |
|
НЕТ – 0 |
Таблица 26.5. Кодирование оператора ВЫХОД
Наименование оператора ВЫХОД |
Числовое значение |
Включить акустический сигнал «занято» |
3.1 |
Отключить акустический сигнал «занято» |
3.2 |
Включить акустический сигнал «ответ |
3.3 |
станции» |
|
Включить таймер 20 с |
4.1 |
Таблица 26.3. Кодирование оператора ЗАДАЧА
Наименование оператора ЗАДАЧА |
Числовое значение |
Найти свободный МЧПП |
2.1 |
Таблица дает возможность разработать универсальную программу,
т.е., она позволяет кодировать и декодировать номера алгоритмов,
которые могут быть записаны и допустимы на языке SDL. Это дает большие преимущества и, в частности, то, что выполнение заданного алгоритма не программируется, а кодируется и вносится как данные для программы обработки таблицы. Поэтому выполнение алгоритма не нужно записывать в операторах языка программирования, на котором выполнена программа работы с таблицей.
Таблица соответствия содержит переходы, записанные в виде чисел. Алгоритм работы с таблицей заключается в том, что выполняются две задачи:
-по заданной паре ВХОД – СОСТОЯНИЕ определяется нужная строка таблицы соответствия;
-осуществляются действия в том порядке, который указан в строке,
ив соответствии с содержанием установленного в ней номера.
Алгоритм достаточно прост, но стремление к оптимизации объема таблиц и их записи в памяти могут усложнить эти алгоритмы.
Особенностью программного обеспечения телекоммуникационной аппаратуры является необходимость реализации многозадачного режима. Даже при децентрализованном управлении один процессор выполняет попеременно несколько задач, т.е. в управляющем устройстве АТС существуют сразу несколько процессов. Ее одна особенность состоит в том, что время старта этих задач непредсказуемо и зависит от внешних причин.
Программное обеспечение, реализующее задачи управления системой коммутации является прикладным программным обеспечением.
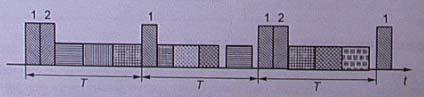
Управление прикладными процессами осуществляется системным программным обеспечением, сердцевиной которого является операционная система (ОС). В число основных функций операционной системы входит распределение ресурсов компьютера (памяти, времени), управление доступом к этим ресурсам. Часть модулей ПО систем коммутации жестко привязаны ко времени и выполняются периодически через фиксированные для конкретного модуля интервалы времени (задачи 1 и 2, рис.26.5). Остальные задачи выполняются в свободные интервалы времени. Последовательность их выполнения определяется системой приоритетов. При распределении компьютерного времени выделяются четыре группы (уровня) задач:
1-й уровень – ручное вмешательство обслуживающего персонала, имеющего соответствующее право на прерывания; оно защищено паролем; 2-й уровень – функции контроля, диагностики и восстановления
работоспособности; 3-й уровень – функции, вызываемые периодически по сигналу
таймера; 4-й уровень – станционные процедуры и процессы.
Практически во всех системах периодически выполняемые задачи по обработке вызовов являются наиболее приоритетными.
Рис. 26.5. Диаграмма распределения времени между обычными и периодическими задачами:
Т – максимальный период выполнения задач
Как видно из рисунка, задачи выполнения основных алгоритмов решаются во время оставшееся от периодически выполняемых задач, которые в телекоммуникационных станциях имеют сравнительно малый период. Например, программа сканирования активизируется через каждые 10 мс. Поэтому периодические программы необходимо делать быстродействующими или включать в них минимальное число функций. Наиболее кардинальным решением является выделение для периодических задач отдельного процессора, работающего параллельно с процессором, обрабатывающим соединение.
Программное обеспечение АТС строится согласно структурной схеме, пример которой показан на рис. 26.6. Эта структурная схема является основой для построения диспетчера, который распределяет задачи, согласно приоритетам их выполнения. Сначала распределяются задачи первого уровня этой структурной схемы. В данном примере – это обработка вызова, техническое обслуживание и т.д. Затем задачи внутри
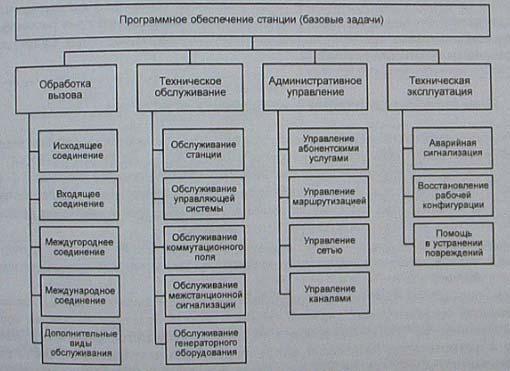
каждой группы верхнего уровня. Внутри каждой группы имеется свой диспетчер задач, который организует последовательность выполнения программ, оптимизируя очереди и время обработки.
Рис. 26.6. Пример структурной схемы программного обеспечения АТС
Рассмотрим алгоритмы функционирования некоторых модулей систем коммутации.
Декодирование, анализ номера и выбор направлений
Общая структура этого алгоритма показана на рис. 26.7. На вход поступает информация, которая должна быть преобразована в другую форму. Пересчет одного числа или набора чисел в другие – довольно распространенная в коммутационной технике операция. В частности она обусловлена многозначностью системы нумерации одного и того же прибора на телефонной станции. Например, абонентский комплект может иметь следующие номера:
-списочный – зафиксированный в абонентском справочнике и поступающий на АТС при наборе номера абонента;
-позиционный – номер места включения этого АК в коммутационном поле;
-порядковый – тип комплекта и номер в типе;
-по вводу – номер линейки определителя;
-по выводу – номер линейки управляющего устройства, в которое включены исполнительные элементы;