

Специальности 1502, 1709, 2903, 2905, 2906, 2915
Лекция 1- введение
Основная литература
1. А. В. Лепишкин и др. Гидропневмопривод. Ч. 2 Гидромашины и гидропневмопривод. М. 2005. г.
2. Навроцкий К.Л. Теория и проектирование гидропневмоприводов: Учебник для ВУЗов. – М.: Машиностроение. 1991г. – 384 с.
3. Попов Д. Н. Механика гидро- и пневмоприводов: Учебн. Для вузов. – М.: Изд-во МГТУим. Н. Э. Баумана, 2001. –320 с.
Приводом называют энергосиловое устройство, посредством которого осуществляется движение какой-либо машины или механизма. Такое устройство состоит из двигателя (электрического, теплового, гидравлического, пневматического) и аппаратуры управления. Двигатель, используя подводимую к нему энергию, приводит в движение машину или механизм. Аппаратура управления служит для стабилизации или изменения параметров этого движения: перемещений, скоростей, ускорений. Двигатель иногда заменяют отдающим заранее накопленную энергию пружинным или инерционным механизмом.
В различных областях техники широко распространены приводы, выполняющие силовые функции в системах управления разнообразными объектами, которыми могут быть в том числе и энергетические машины. Используемые в приводах систем управления двигатели называют исполнительными. В качестве таких двигателей чаще всего применяют электрические и работающие на жидкости или газе устройства. Если рабочей средой для исполнительного двигателя является жидкость или газ, то привод называют соответственно гидро- или пневмоприводом.
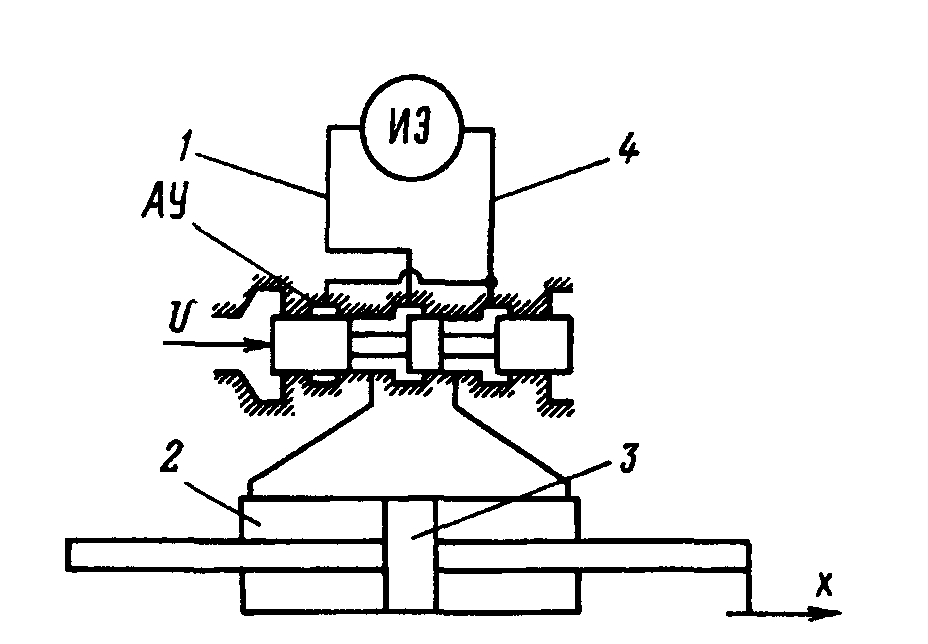
Рис. 1. Общая схема объемного гидро-или пневмопривода
Принцип действия объемного привода состоит в том, что жидкость или газ под давлением изменяют объем камер двигателя, вызывая тем самым перемещение рабочего органа двигателя и соединенного с ним выходного звена (рис. В.1). Исполнительный двигатель выполнен в виде цилиндра с поступательно перемещающимся в нем поршнем, шток которого служит выходным звеном. От источника энергопитания (ИЭ) рабочая среда (жидкость или газ) поступает по напорной магистрали к аппарату управления (АУ). При подаче сигнала (стрелка "II" на схеме) аппарат управления соединяет напорную магистраль 1 с одной из полостей цилиндра 2, а полость, расположенную по другую сторону поршня 5, — со сливной магистралью 4. Создаваемое ИЭ давление рабочей среды в напорной магистрали больше, чем в сливной, поэтому на поршень 3 начинает действовать сила, вызывающая его движение вместе со штоком в направлении х. Перемещение штока передается механизму, управляющему каким-либо объектом. При движении поршня объем полости цилиндра (камеры исполнительного двигателя), в которую поступает рабочая среда, увеличивается, а объем камеры, из которой рабочая среда вытесняется в сливную магистраль, уменьшается.
Направление движения поршня можно изменить на обратное, поменяв при помощи аппарата управления соединение полостей цилиндра с напорной и сливной магистралями на противоположное предыдущему. Для остановки поршня оба канала, идущие к полостям цилиндра, должны быть перекрыты в аппарате управления (такой аппарат управления называется трёхпозиционным распределителем).
Приводы, принцип действия которых основан на гидродинамическом воздействии потока жидкости или газа на рабочий орган исполнительного двигателя (например, в двигателе турбинного типа), применяют в системах управления не столь широко, как объемные приводы. Это вызвано сложностью реверсирования движения выходных звеньев приводов с гидро- или газодинамическими двигателями, необходимостью установки дополнительных редукторов для согласования обычно высоких скоростей вращения валов двигателей с более низкими скоростями движения управляемых устройств и другими их конструктивными особенностями. Однако если в источнике энергопитания объемного гидро- или пневмопривода нецелесообразно или недопустимо (по условиям взрывобезопасности или другим причинам) иметь насос или компрессор с электродвигателем, то вместо него применяют гидравлический или газовый двигатель турбинного типа. Такие же двигатели могут быть использованы для передачи энергии от одной машины к другой или для того, чтобы приводить в движение транспортные средства (примером могут служить гидродинамические передачи).
При создании приводов, прежде всего, решают задачи проектирования, ориентированные на получение наилучшего из возможных вариантов привода, удовлетворяющего техническим требованиям. Выбор проектного варианта во многом зависит от схемы и конструкции привода, технологии изготовления устройств привода и ряда других условий, которые могут быть противоречивыми. Показатели, необходимые для оценки проектного варианта, при современных методах проектирования конструктор имеет возможность находить рассчитывая на ЭВМ характеристики и параметры приводов. В процессе таких расчетов приходится рассматривать одну из сформулированных в теоретической механике фундаментальных задач динамики: определение законов движения составляющих систему тел при известных силах или вычисление сил, обеспечивающих заданные законы движения тел.
При проверке характеристик изготовленного привода, а также в случае прогнозирования ситуаций, возникающих при эксплуатации систем с приводами, схема, конструкция и большинство параметров привода заранее известны, что несколько упрощает решение указанных выше задач динамики.
Как в том, так и другом случае для исследования и расчета системы с приводом необходимо иметь его математическую модель, достоверно описывающую свойства привода и своей сложностью не препятствующую получению в достаточной мере обозримых результатов. С позиций математического моделирования особенности гидро- и пневмоприводов обусловлены рабочей средой, для описания взаимодействия с которой элементов привода требуется использовать не только уравнения механики твердого тела, но и уравнения механики жидкости и газа. Кроме того, гидро- и пневмоприводы представляют собой управляемые системы, снабжаемые энергией от внешних источников питания рабочей средой под давлением и отдающие энергию в окружающую среду при своей работе, что также оказывает влияние на математическое моделирование протекающих в приводах динамических процессов. Исходя из сказанного, в механике гидро- и пневмоприводов выделяют следующие важные вопросы:
определение сил при взаимодействии элементов приводов с жидкостью или газом;
энергоснабжение гидро- и пневмоприводов;
математическое моделирование гидро- и пневмоприводов;
исследование устойчивости гидро- и пневмоприводов и корректирование их характеристик;
расчет колебательных и переходных процессов в гидро- и пневмоприводах.
Предварительно рассмотрим устройство и принцип действия, ГПП, их классификацию, а также основные сведения о свойствах используемых в приводах рабочих сред.