

Расчетные схемы выглядят так:
О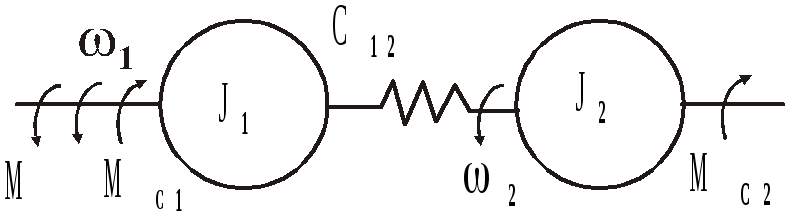 дномассовая
или жесткое механическое звено
двухмассовая
дномассовая
или жесткое механическое звено
двухмассовая
 трехмассовая
трехмассовая
Здесь J1,J2,J3 – суммарные приведенные моменты инерции, образованные приведенными массами, связи между которыми приняты жесткими. С12 и С23 – приведенные жесткости упругих связей между J1 и J2, J2 и J3.
Инерционная масса J1 включает в себя момент инерции ротора (якоря) двигателя и других элементов, жестко связанных с ним. К этой массе приложен электромагнитный момент М двигателя и момент статической нагрузки Мс1, который обычно является суммарным моментом потерь на валу двигателя и жестко с ним связанных элементах. Инерционная масса J2 является в трехмассовой расчетной схеме промежуточной массой. К ней приложен момент сопротивления Мс2. Инерционная масса J3 в этой схеме представляет суммарный приведенный момент инерции элементов, жестко связанных с рабочим органом механизма. К ней приложен момент внешней нагрузки этой массы Мс3.
В двухмассовой расчетной схеме J1 – это суммарный приведенный момент инерции ротора (якоря) двигателя и других элементов, жестко связанных с двигателем, а J2 суммарный приведенный момент инерции элементов, жестко связанных с рабочим органом механизма. Упругая связь между J1 и J2 характеризуется эквивалентной жесткостью С12. Суммарные моменты сопротивления на валу двигателя и механизма – Мс1 и Мс2.
Обычно 3-х массовая расчетная схема используется для детального анализа условий движения механизма. Для исследования отдельных физических особенностей 3-х массовая расчетная схема сводится к 2-х массовой. Электромеханическая система с 2-х массовой упругой механической частью представляет собой простейшую модель электропривода, наиболее удобную для изучения влияния упругих связей.
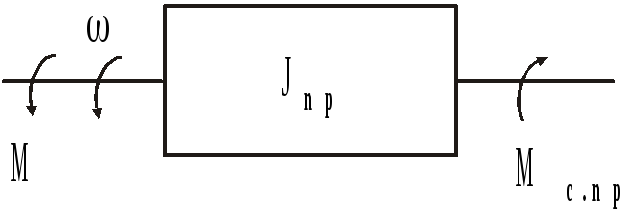
В
тех случаях, когда влияние упругих
связей незначительно или при решении
задачи ими можно пренебречь, механическая
часть электропривода представляется
простейшей расчетной схемой (см. рис.)
– жестким приведенным механическим
звеном, т.е. многомассовая механическая
часть эл.привода с моментами инерциями
J1
,J2 и т.д.
заменяется действием одного момента
инерции Jnp,
приведенного к расчетной скорости.
Суммарный приведенный момент инерции
эл.привода в этом случае определяется
как
![]()
 ,
где
,
где
J – момент инерции двигателя; n, k – число элементов установки, совершающих соответственно вращательное и поступательное движение.
Суммарные
приведенный к валу двигателя момент
статического сопротивления в общем
виде можно представить как:![]()
![]() ,
где
,
где
p,q – число внешних моментов Мi и сил Fj, приложенных к системе кроме электромагнитного момента двигателя.
Кинематические схемы многодвигательных эл.приводов приводят к разветвленным расчетным схемам.
Приведенные выше формулы для определения приведенных Mc, Fc не учитывают КПД отдельных передач или механизма в целом.
С
учетом КПД механизма![]() ;
;![]()
При
наличии между двигателем и механизмом
нескольких передач с передаточными
отношениями
j1,j2
и т.д.
![]()
При
передачи энергии от рабочего органа
механизма к двигателю (в случае активного
момента сопротивления):
![]() ;
;![]() ;
;![]()