

Обобщенная эл.Механическая система эл.Привода с линейной (линеаризованной) механической характеристикой двигателя.
Выполненный ранее анализ свойств двигателей различного вида показывает, что при определенных условиях их динамические механические характеристики описываются идентичными уравнениями, что свидетельствует об аналогичности основных эл.механических свойств разнотипных двигателей и о возможности обобщенного изучения динамики электромеханических систем с разными двигателями. Возможность такого обобщения вытекает из сравнения уравнений динамической жесткости для различных двигателей. Так, для ДНВ
![]()
Для ДПВ и ДСВ при линеаризации механических характеристик в окрестности точки статического равновесия
![]()
Для АД при линеаризации рабочего участка характеристики и питании от источника напряжения
![]()
![]()
Распространив обозначение Тэ на двигатели постоянного тока, получим следующие обобщенные уравнения динамики электромеханической системы с линейной или линеаризованной механической характеристикой двигателя, динамическая жесткость которой дин описывается передаточной функцией апериодического звена с коэффициентом и постоянной времени Тэ
![]()
![]()
![]()
![]()
Этим уравнениям соответствует структурная схема
 Приведенные уравнения и эта схема
справедливы для любого электропривода,
уравнение механической характеристики
которого в рассматриваемом процессе
может быть с достаточной точностью
представлено первым уравнением системы,
а механическую часть удовлетворительно
представляет 2 –х массовая расчетная
схема.
Особенности
применяемого двигателя при этом
отражаются в конкретных значениях
переменных и выражениях параметров.
Так, для ДВН
Приведенные уравнения и эта схема
справедливы для любого электропривода,
уравнение механической характеристики
которого в рассматриваемом процессе
может быть с достаточной точностью
представлено первым уравнением системы,
а механическую часть удовлетворительно
представляет 2 –х массовая расчетная
схема.
Особенности
применяемого двигателя при этом
отражаются в конкретных значениях
переменных и выражениях параметров.
Так, для ДВН
![]() ;
;
 ;
;
Для АД при линеаризации рабочего участка характеристики в области S < S кр
![]() ;
;
![]() ;
;![]()
Для
анализа динамики эл.привода
с СД при
![]() можно воспользоваться уравнением
можно воспользоваться уравнением
![]()
и
структурной схемой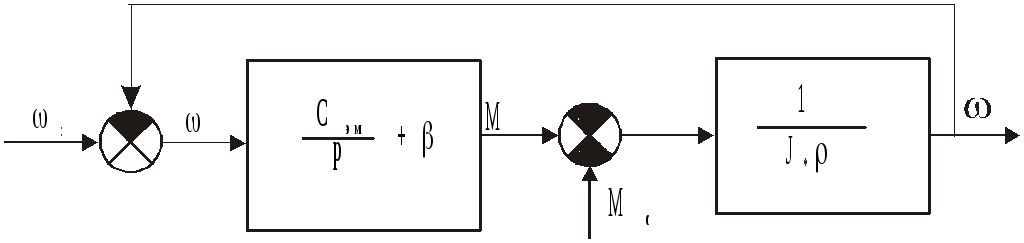
Статический (установившийся) режим работы электропривода и статическая устойчивость электропривода
Установившемуся
режиму работы соответствует движение
всех элементов электромеханической
системы с постоянной скоростью.
Этот режим наступает после затухания
свободных составляющих переходного
процесса,
вызванного или изменением управляющего
воздействия или изменением,
например нагрузки.
В установившемся режиме М=Мс.
Это следует непосредственно из уравнений
движения электропривода,
если положить в них
![]() .
Так, для двухмассовой системы с упругой
связью при р=0 получим
.
Так, для двухмассовой системы с упругой
связью при р=0 получим
![]()
![]() , откуда
, откуда
![]()
![]()
В случае одномассовой механической системы уравнение движения при р=0 имеет вид
![]() и
и
![]()
Значения
и М в
установившемся режиме электропривода
определяются графически точкой
пересечения механических характеристик
двигателя и механизма , т.к.
в этой точке М=Мс
, что означает
![]() и=const
.
и=const
.
Установившейся
режим электропривода можно рассматривать
как состояние равновесия системы
относительно координаты
. Он может
быть устойчивым и неустойчивым.
Критерием устойчивости механической
системы с одной степенью свободы является
условие возникновения динамического
усилия (момента) , возвращающего систему
в исходное положение при выведении 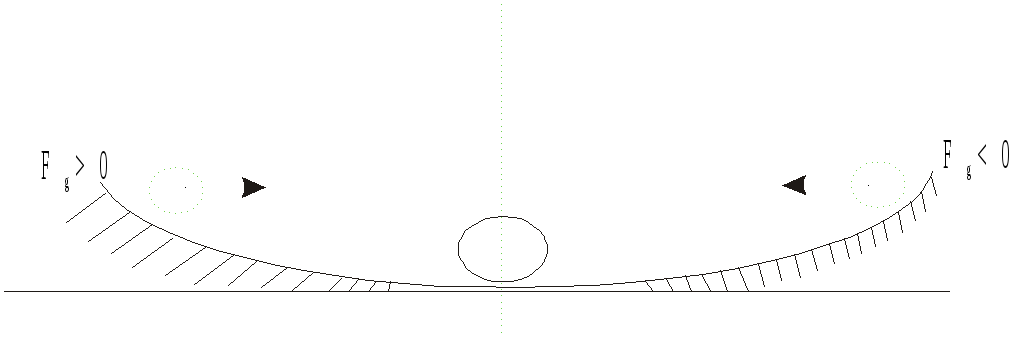 ее
из состояния равновесия.
Другими словами , знак возникающего
динамического усилия (момента) должен
быть противоположным знаку приращения
скорости, т.е.
ее
из состояния равновесия.
Другими словами , знак возникающего
динамического усилия (момента) должен
быть противоположным знаку приращения
скорости, т.е.
![]() или
или
![]()
Условие
устойчивости можно записать и иначе.
Т.к.
в окрестности точки установившегося
режима при малых приращениях
механические характеристики могут быть
приняты линейными,то ![]() и
и![]()
![]()
Следовательно, условие устойчивости будет
![]() или
или![]()